
摘要:隨著人工智能、計算機、5G、物聯網、大數據、區塊鏈等新一代技術與汽車產業的深度融合,自動駕駛汽車的重要性日益凸顯,正逐漸成為全球汽車產業發展的戰略制高點,世界各國正在加速布局。
當前,智能化、網聯化、電動化和共享化是汽車技術演進的重要特征和產業發展趨勢,是解決交通安全、道路擁堵、能源消耗等問題的重要手段,是自動駕駛汽車發展的核心基礎技術。自動駕駛汽車在對感知系統、決策系統、控制系統、高精度組合導航定位系統、通信系統等關鍵系統深入探討研究的同時,伴隨著新一代高性能計算單元、各類型感知部件等硬件設備布置在車輛上,以及裝載運行自動駕駛操作系統的系統軟件、功能軟件和向上支撐的應用軟件。
為應對日趨復雜的汽車電子電氣系統,對自動駕駛汽車的電子電氣架構研究是非常必要的,亦是非常重要的。自動駕駛汽車電子電氣架構的技術研究不僅促進自動駕駛系統技術的發展,也可以延長汽車的產業鏈和拓展汽車產業的涉及面。
圖片來源:互聯網
1 EEA概述
1.1 EEA綜述
電子電氣架構(Electrical and Electronic Architecture,簡稱EEA) 概念最早來源于IT行業,是由美國DELPHI公司首先提出的,主體思路是按整車各功能域類型劃分并集成多個功能ECU進行控制。隨著汽車技術和行業的發展,EEA概念已基本清晰,但鑒于“架構”一詞外延較廣,也屬于一種抽象化概念,致使各OEM電子電氣架構工程師不像整車電氣設計工程師、電氣部件研發工程師和電氣測試工程師等工作邊界那么清晰。在電氣與電子工程協會制定的IEEE Std1471-2000 《Recommended Practice for Architectural De-scription of Software-Intensive Systems》 標準中第3.5條款定義了Architecture (架構) 一詞:The fundamental organization of a system embodied in its components,their relationships to each other,and to the environment,and the principles guiding its design and evolution。從標準定義“架構”分析, 架構是一種抽象化的概念描述,用來描述物理功能和信息功能之間的關聯以及形式元素之間的分配。總體來說,架構是系統的組織結構表現,是一種關系的體現,是一種分配原則。
1.2 汽車EEA定義
結合汽車屬性和汽車電氣系統的功能及性能法規標準要求,汽車EEA可以定義為:汽車上電氣部件之間的相互關系,以及包括汽車各電氣硬件設計、軟件開發測試和各功能/性能實現等所有電氣部件和電氣系統所共同承載邏輯功能之間的關系,以及未來研發設計、維護保養和監測電氣系統所規定的諸項原則。
汽車EEA工程師職責主要是在整車功能需求、法規標準和設計要求等特定約束條件下,對功能、性能、工藝、裝配、服務甚至成本等各方面進行分析研究,輸出最優化的整車電氣系統模型和電氣總布置規劃書。汽車EEA的開發包括需求定義、邏輯功能架構設計、軟件/服務架構設計、硬件架構設計、線束設計等不同層面的開發活動。汽車EEA設計的最終目標是:對汽車上的電子電氣元器件排布合理、控制 策略有效實施和信息交互通暢,以達到整車設計功能實現、性能最優、總體成本控制最低。
1.3 EEA法規標準
針對汽車EEA設計和要求標準,目前在國際上還沒有專門針對汽車電子電氣架構的指導性標準。但隨著ISO 26262《Road Vehicles-Functional Safety》 和GB/T 34590 《道路車輛功能安全》 標準的頒布實施,可作為汽車EEA設計與優化參考依據。
2 自動駕駛汽車EEA
隨著汽車智能化、網聯化、電動化和電子化等技術的演進,傳統汽車EEA已不能滿足汽車技術發展需要,全新一代自動駕駛汽車EEA對整車的安全性、可靠性和擴展性至關重要。以蘇州金龍MiniBus“深藍”自動駕駛車型為例探討新一代自動駕駛汽車EEA,如圖1所示。

圖1 蘇州金龍MiniBus“深藍”自動駕駛車型
2.1 “深藍”自動駕駛系統框架結構
“深藍”自動駕駛系統框架劃分為環境感知、決策規劃、運動控制、定位導航、整車通信和車聯網等6個模塊,采用高算力、高性能的車規級域控制器作為自動駕駛系統的車載 智能計算平臺,自動駕駛系統框架結構如圖2所示。
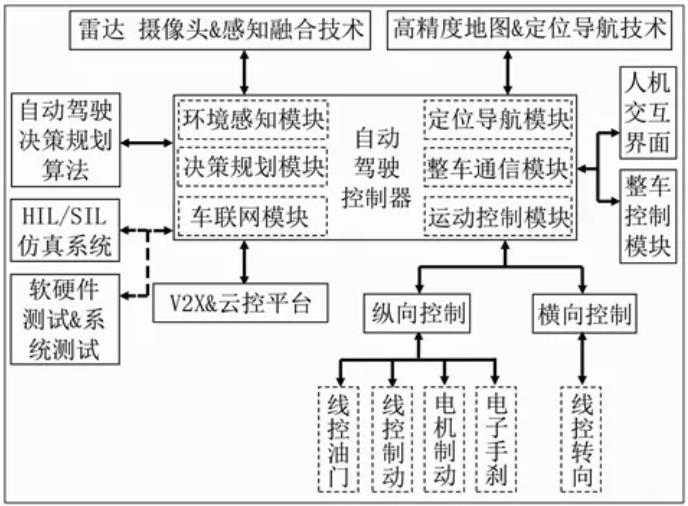
圖2 “深藍” 自動駕駛系統框架結構圖
環境感知模塊主要為自動駕駛系統提供周圍障礙物的位置信息,以及與周圍車輛、道路設置或行人等障礙物的相對距離、相對速度和相對加速度等信息,進而為控制決策提供信息依據,主要包括激光雷達、毫米波雷達、超聲波雷達和攝像頭等感知設備,并綜合各傳感器的工作原理、檢測范圍、工作條件及性能特點等對感知融合技術開發。決策規劃模塊作為衡量和評價自動駕駛能力的最核心的指標之一,其主要任務是接收環境感知模塊發出的當前感知信息并對環境做出分析,然后對運動控制模塊下達指令。較典型的決策規劃模塊可分為全局路徑規劃、行為決策層和運動規劃3層,涉及到如Dijkstra算法、Filed D*算法 、BP神經網絡法等自動駕駛的核心算法。
運動控制模塊是在保證車輛操縱安全性和穩定性的前提下,使車輛精確跟蹤期望道路,還需具備良好的動力性、平順性和乘坐舒適性。運動控制模塊分為縱向控制和橫向控制,縱向控制是通過油門、制動的協調實現對車輛的車速和加速度精確控制,橫向控制是通過轉向的控制實現對車輛的路徑控制。運動控制算法較多,目前應用較多的有PID控制算法、MPC控制算法、LQR控制算法和BP神經網絡控制算法等,也可結合模糊邏輯和滑模控制理論綜合設計控制系統。車聯網模塊通過OBU和RSU實現C-V2X無線通信,結合部署MEC和建設云平臺,利用PC5模式和Uu模式將“人-車-路-云”等交通參與要素有機地聯系在一起,彌補單車智能在技術上的不足,實現更豐富的自動駕駛運行場景。
定位導航模塊對自動駕駛系統非常重要,定位是為了確定自動駕駛車輛所在位置的相對或絕對坐標,導航是為自動駕駛車輛指示方向和路徑信息,“導航需要定位,定位為了導航”。GNSS或其差分補償RTK是最基本的定位方法,但單一技術難以滿足現實復雜環境中自動駕駛車輛高精度定位穩 定性的需求,采用慣性導航、高精度地圖、傳感器定位等多 種技術融合來實現精準定位。自動駕駛系統仿真可以對自動駕駛部件、系統以及整車進行不同層級的全鏈條測試評價,是實車測試的前提條件。通過仿真可以實現更多、更復雜的自動駕駛場景測試,也可以提前發現軟件存在的BUG,并可以依據仿真結果對系統參數進行優化,提高實車測試的安全性,節省測試時間和成本。
2.2 “深藍”自動駕駛汽車EEA
按照車載控制器集中化技術路線,結合模塊化設計思想和車載域控制器演進發展趨勢開發“深藍”自動駕駛汽車EEA,該EEA采用底盤域控制平臺、車身控制平臺、車載智能計算平臺和車聯網控制平臺“Ⅳ平臺”方案。車載智能計算平臺通過傳輸速率為500kbit/s的高速CAN總線、傳輸速率為2Mbit/s的CAN FD總線和符合IEEE 802.3z標準的千兆以太網分別與車身控制平臺、底盤域控制平臺和車聯網控制平臺進行信息交互。車身控制平臺通過傳輸速率為250kbit/s的低速CAN總線、傳輸速率為500kbit/s的高速CAN總線分別與底盤域控制平臺、車聯網控制平臺進行信息交互,如圖3所示。
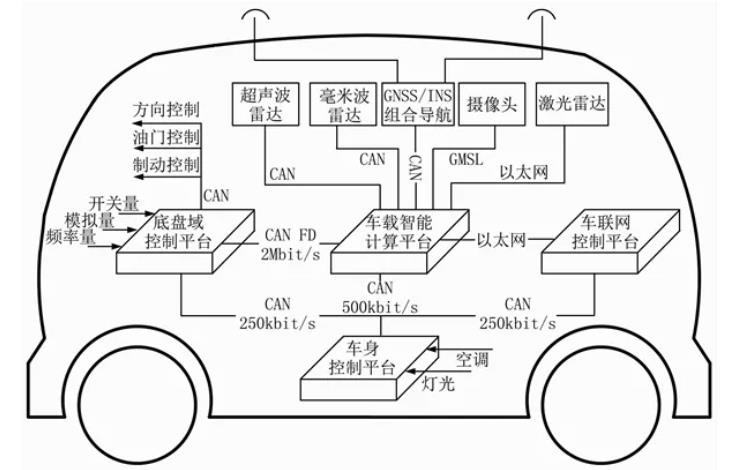
圖3 “深藍” 自動駕駛汽車EEA框架圖
底盤域控制平臺作為線控行車制動EHB、線控駐車制動EPB、線控電機驅動、線控轉向C-EPS的上位機,通過傳輸速率為500kbit/s的高速CAN總線實現對線控底盤的控制。底盤域控制平臺通過接收到的車身狀態信息、整車位姿信息以及線控底盤的開關量、模擬量和頻率量等信息綜合運算、研判后,響應執行自動駕駛車輛的縱向和橫向運動。
車載智能計算平臺作為自動駕駛系統的“大腦”是核心功能部件。“深藍”車型的自動駕駛系統采用高算力(集成CPU算力和AI算力)、高性能的車規級域控制器作為車載智能計算平臺,主要包括按異構分布設計的硬件平臺、車載操作系統和功能軟件3部分,并支撐應用軟件和算法的開發,硬件接口包括電源、GMSL、CAN、CANFD、以太網、UART和GPIO接口等,功能軟件為基于SOA架構,遵循AUTOSAR規范的開放接口。其中超聲波雷達適配傳輸速率為250kbit/s的低速CAN總線,毫米波雷達采用傳輸速率為500kbit/s的高速CAN總線,激光雷達適配1000BASE-T1以太網,攝像頭采用GMSL數據傳輸接口,基于RTK技術的厘米級GNSS/IMU組合導航定位系統適配傳輸速率為500kbit/s的高速CAN總線,分別與車載智能計算平臺進行數據通信。基于各傳感器的不同感知特性,通過對周圍環境包括其它交通參與者信息在數字世界中的準確重建,將各傳感器對環境感知信息融合,且進行時鐘同步、置信度更新等處理,并結合厘米級高精度地圖,為規劃決策控制模塊提供精準的感知道路環境信息,最終驅動“深藍”的執行系統實現自動駕駛。
車身控制平臺主要基于傳輸速率為250kbit/s的低速CAN 總線對車身電器系統通信和實施控制,如空調、燈光、娛樂、人機交互 (HMI)、除霜、門控等系統。在自動駕駛過程中,通過車身控制平臺為自動駕駛系統的規劃決策提供車身電器系統的參數依據,同時控制執行車身電器系統的功能實現。
車聯網控制平臺采用第Ⅳ代5G版G-BOS(智慧運營系統),該系統不僅具備“智能運營調度、智能車輛監控、智能安全防控、智能故障預警、智能充電運營、智能出行服務和OTA”等功能,還集成了5G模塊、V2X模塊、數據網關、高精度定位等模塊,可擴展 集成DSSAD(自動駕駛汽車數據記錄系統),并通過配置加密芯片模組嵌入Cyber SDK密碼開發庫,實現車輛的數據安全和網絡安全等信息安全管理。車聯網控制平臺通過V2X模塊,支持PC5接口 (直通鏈路接口)和Uu接口(空中接口)通信,可實現車路協同、 編隊行駛等功能場景。應用5G“大帶寬、低時延、廣連接”的網絡特性,提升車聯網的上行/下行速率,響應 “深藍”自動駕駛系統低時延、實時性要求較高的技術核心訴求。
3 汽車EEA演進趨勢
隨著汽車電控技術的快速發展,整車電控單元的快速增長促使數據交互量也在飛速增長,這些海量數據也像人類出行需求一樣要通過各種載體準時、高效、安全地送達正確的地方,數據傳輸管理方法及數據計算控制策略顯得尤為重要。以功能劃分為主要特征的汽車EEA 逐漸轉化為以分區域管理為主體,同時分區域管理的思想, 在整車EEA中平臺化、模塊化、集成化、智能化逐漸占有越來越多的權重。
在很大程度上,未來汽車以性能、功能、成本和服務為主要競爭重點,以上競爭點均與整車EEA有著直接或間接的關聯,整車企業把EEA作為核心技術和競爭力是必然趨勢。筆者通過分析研究整車EEA,總結出汽車行業電子電氣架構演進發展,如表1所示。
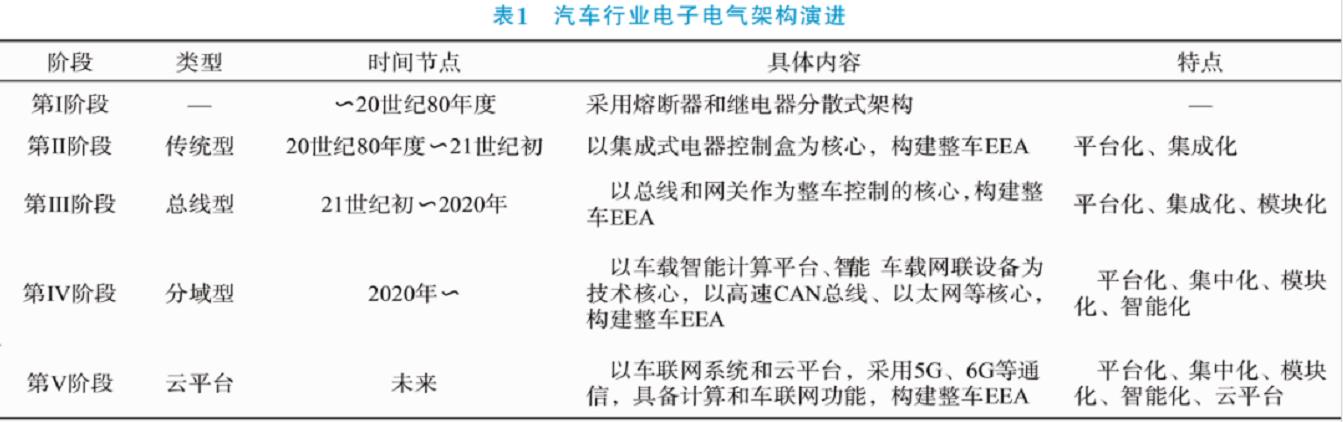
表1 汽車行業電子電氣架構演進
汽車EEA演進趨勢的根本驅動力是市場實際需求和用戶對性能/功能預期期望的不斷提升。伴隨著汽車電子電氣技術的飛速發展,汽車行業紛紛對未來汽車EEA提出規劃,如BOSCH公司提出的“融合、集中、云平臺”EEA演進趨勢,安波福提出的“大腦”+“神經”EEA演進趨勢,偉世通提出的“三域(VDC車控域控制器、ADC智能駕駛域控制器、CDC智能座艙域控制器)”EEA方案,華為提出的“計算+通信”CC架構(CDC智能座艙、VDC整車控制、MDC智能駕駛)方案;又如整車企業大眾MEB平臺圍繞ICAS1 (網關服務單元)、ICAS2( 信息娛樂單元)和ICAS3 ( 輔助駕駛單元) 3個中央電腦搭建整車EEA(E3架構),豐田汽車提出未來EEA將采用Central &Zone EEA方案,特斯拉Model 3采用的中央計算模塊(CCM)、左車身控制模塊(BCM LH)、右車身控制模塊(BCM RH) 3大部分組成整車EEA等。綜上所述,未來汽車EEA將按照3層技術演進:感知執行層、計算與控制層、云服務層,并充分結合平臺化、模塊化和集中化的設計思想。
4 結論
隨著汽車智能化、網聯化以及自動駕駛技術的迅速發展,以及市場對汽車舒適性和娛樂性的需求不斷提升,汽車將會配置越來越多的感知設備和執行單元,這對汽車EEA會提出更高的要求,并且伴隨著計算機、物聯網、人工智能和云平臺技術的愈發成熟,也將催生汽車EEA發生深刻變革。以太網總線技術、云平臺和以智能車載計算平臺為主體的EEA將是未來汽車研究的重點方向。
來源:智能汽車開發者平臺 本文由李春,聶石啟,司炎鑫,劉明春聯合創作






