
導讀:汽車電子電氣架構由分布式控制往集成式控制方向過渡,逐漸采用域控制器。但對于傳統(tǒng)主機廠開發(fā)域控制器不是一蹴而就之事,而是在現有平臺和供應商體系中逐步升級開發(fā)。
本文主要探討傳統(tǒng)燃油車的E/E架構往域控制與主干網方向演進的技術路線。

一、當前E/E架構與整車廠的應用現狀概述
汽車電子電氣架構的發(fā)展趨勢是從分布式到集成式,再到域控制和車載電腦。當前分布式架構的優(yōu)點是可裁剪、可擴展適應高低配的需求;按照功能分配控制單元,適應于整車開發(fā)組織架構;控制單元功能單一,供應商開發(fā)后可以應用不同OEM;零部件獨立開發(fā),平臺化效率高,軟硬件開發(fā)均可依托供應商;整車采用基于網關和CAN通信成本低。但隨著汽車產品消費升級,配置下沉,控制器與線束的成本均較高;控制器之間的通信需求不斷增長,傳統(tǒng)CAN總線負載率提高,雖然通過網關劃分了網段,但有大量交互還是得通過網關的報文路由和信號路由。大量控制器軟件分布在供應商手中獨立開發(fā),增加了整車集成和測試的難度,導致整車軟件開發(fā)效率較低,無法實現整車級的OTA。
但在此過程中,OEM掌握了部分軟件邏輯簡單、對功能安全要求不高的控制器的開發(fā),例如車身控制器BCM、門模塊、空調控制等。逐步搭建的研發(fā)團隊、知識結構、技術積淀和供應鏈體系,無法徹底拋棄和另起爐灶。而造車新勢力則沒有這方面顧慮,可以完全從零開始。逐步過渡、迭代開發(fā)有利于傳統(tǒng)OEM充分利用現有資源,降低開發(fā)成本。
二、汽車各控制領域的發(fā)展方向和需求
傳統(tǒng)車動力系統(tǒng)ECU+TCU的形式已經固化,新能源車的動力系統(tǒng)PCU+VCU+BMS+OBC的模式正在往集成化方向發(fā)展。底盤控制領域已經足夠成熟,高端車采用電控懸架提高舒適性,采用可變轉向比提高操控性。隨著混合動力開發(fā),P4電機逐漸取代了傳統(tǒng)的分動器+傳動軸+驅動橋的四驅系統(tǒng)。在被動安全領域,獨立的安全氣囊控制器被幾個核心供應商所掌控。
汽車“新四化”影響較大的是自動駕駛領域、車身控制領域和智能座艙領域,是行業(yè)主要的發(fā)展方向。自動駕駛起步晚,但技術起點較高且在快速升級應用各種新技術,大量的攝像頭、雷達、地圖對通信系統(tǒng)要求較高,研究引進以太網。而EPS、ESC、EMS、TCU傳統(tǒng)動力底盤系統(tǒng)僅做軟件開發(fā)以適應自動駕駛對轉向、制動、加速、停車的要求。
車身控制領域和智能座艙領域是客戶價值體現最多的領域,功能越來越復雜,所用的新技術大部分來自于消費電子,如車聯網、語音控制、AI等,由于更新升級較快,迭代周期更接近于手機,需要OEM自主開發(fā)實現快速應用和迭代,要求OEM必須具備在控制器軟硬件方面的開發(fā)能力。
三、向域控制與主干網方向迭代的技術路線
域控制器是對領域內算力的整合,按照功能域或區(qū)域整合,對軟硬件開發(fā)能力要求更高,將相關或不相關的功能整合在一起,域控制器具備主干網的接口。主干網采用高速通信,目前主流仍然是CAN,動力底盤部分有采用Flexray,成本高。高端OEM在研究以太網作為主干網,但國內傳統(tǒng)主機廠難以承受研發(fā)投入和零部件成本,且整車層面沒有必然的功能需求,目前僅在自動駕駛領域和OBD診斷方面采用。各主機廠基礎技術架構不同,研發(fā)組織架構不同,無法全盤推倒,所以根據自身的實際情況去迭代開發(fā)才是最符合自身需求、降低開發(fā)成本和控制開發(fā)周期的路線。下文以傳統(tǒng)分布式電子電氣架構為例,研究往域控制與主干網方向演進的技術路線。
3.1、第一階段:形成2個域控制器
動力底盤單元不變。在車身領域以BCM車身控制為中心整合出車身域控制器,帶大量的子CAN和LIN等子網,短期內不能整合的則作為子節(jié)點。隨著開發(fā)能力的提高,域控制器逐漸集成控制類的子節(jié)點,最終只保留了帶總線的開關、傳感器和執(zhí)行器以及對造型和安裝結構有特殊要求的部件,其內部軟件完全通用化。同樣在智能座艙領域,以HMI主機中心儀表、HMI屏、HUD等座艙域控制器下屬的顯示屏,通過內部CAN傳輸控制信號,LVDS、CAN、以太網等傳輸視屏和音頻等信號,通過LIN傳輸傳感器、開關和部分執(zhí)行器的信號。域控制器逐步對領域內子節(jié)點大規(guī)模集成,是領域內功能算法的中心,車身域控制器和智能座艙域控制器軟件將是整車軟件開發(fā)和產品升級的核心。
形成以動力底盤+車身域+座艙域的主干網架構,獨立網關或將不存在,網關的功能將分布到各域控制器中,如圖1所示。對主干網節(jié)點進行整合裁剪,動力底盤節(jié)點集成的難度大,但是可以通過帶子CAN和私有CAN來減少主干網的節(jié)點,從而控制主干網的負載率。子網不但用在域控制器與子節(jié)點之間,同時可以用在主干節(jié)點之間輔助主干網的通信。
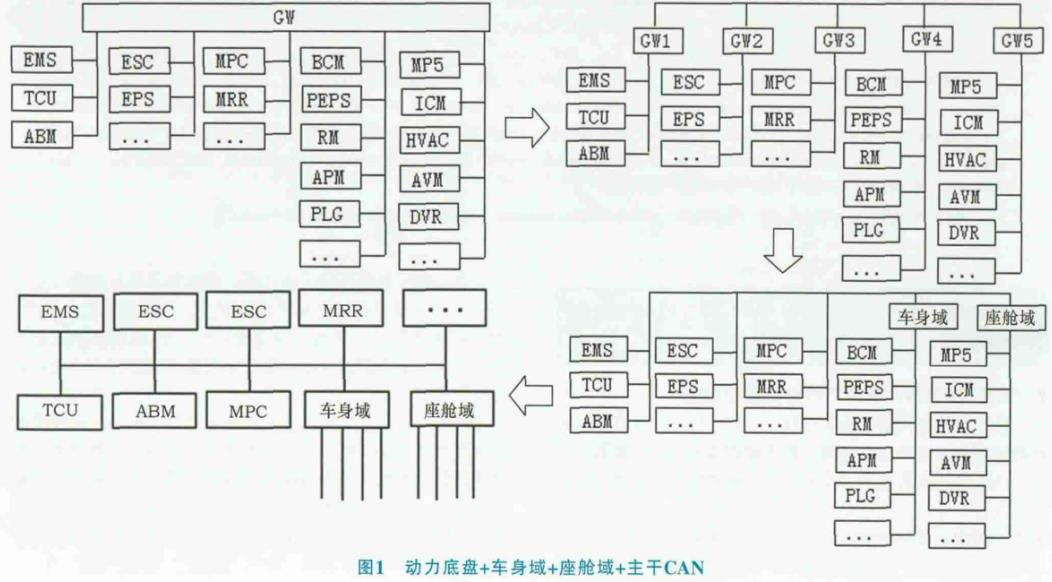
圖1 動力底盤+車身域+座艙域+主干CAN
主干網考慮逐步升級,初期沿用CAN對傳統(tǒng)動力底盤節(jié)點的通信接口沒有變動,充分發(fā)揮CAN低成本的優(yōu)勢,充分考慮控制主干網的負載率。
3.2、第二階段:升級主干網
隨著功能增加和主干網負載率的提高,升級主干網,如使用CAN-FD,也能夠使動力底盤大部分節(jié)點兼容,能夠對現有架構進行延續(xù)、拓展和兼容,用CAN-FD報文代替CAN報文,減少報文數量,降低主干網的負載率;視動力底盤一級供應商的零部件升級情況,是否會全部升級到采用Flexray、以太網或者新的更高速的總線作為其主通信方式。當然也可以在原主干網基礎上,根據功能需求局部采用Flexray或者以太網進行過渡,如圖2所示。這種架構適合大部分傳統(tǒng)汽車OEM,采用分階段、迭代方式的開發(fā),有利于技術能力的逐步提升,提高產業(yè)化落地的效率,降低開發(fā)風險,同時符合整車產品迭代的規(guī)律,保證了零部件供應鏈的延續(xù)性。

圖2 升級主干網
3.3、第三階段:其他領域的整合
對于純電動和PHEV,VCU將集成PCU、BMS、OBC等模塊形成新能源的動力域控制器,接入主干網。對于燃油車新增一個動力域控制器如果僅僅起到動力域網關的功能而沒有集成算力,則意義不大可直接跳過這一階段。L2+及以上級自動駕駛將形成一到兩個自動駕駛的信息融合層與決策層核心控制器,接入大量的攝像頭、毫米波雷達、超聲波雷達等,并集成以太網交換機獲取差分定位與高精度地圖信息,可以擴展成自動駕駛域控制器。自動駕駛域控制器接在主干網上與EMS、TCU直接交互。如此一來則形成了動力底盤域、自動駕駛域、車身域、座艙域,如圖3所示。在自動駕駛域、智能座艙域內部,根據通信需求可以內部采用以太網,連接攝像頭、高精度地圖、T-BOX等。
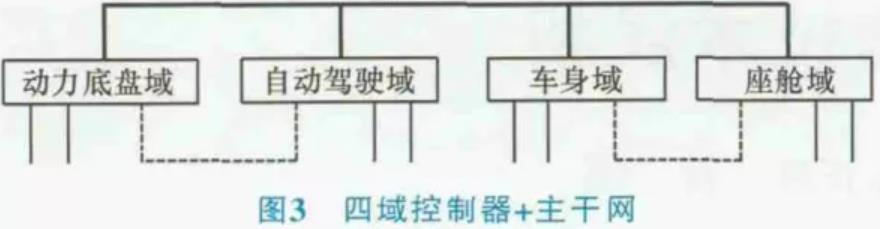
圖3 四域控制器+主干網
最終,隨著OEM對各個域控制器軟硬件開發(fā)能力掌握,以及自動駕駛成為標配或者法規(guī)項,是否會進一步整合,動力底盤域與自動駕駛域整合成行駛域,車身域與智能座艙域整合成駕駛輔助域,最終二者是否會再集成形成車載計算機還需要分析。目前來說,雖然控制器集成了,但傳感器、執(zhí)行器由于安裝位置的要求無法集成,普通經濟型車也有多達200個傳感器和執(zhí)行器,都接入車載計算機線束將會比較復雜。因此需要在分布式和集中式控制之間尋求系統(tǒng)成本、裝配維修和可靠性的平衡。
四、總結
傳統(tǒng)OEM考慮自身的特點無法“一刀切”來切換自己的E/E架構,但技術發(fā)展趨勢又無法阻擋,所以利用現有資源分階段逐步提升研發(fā)能力,逐步過渡才是最有效的演進路線。傳統(tǒng)整車廠進入域控制器軟硬件開發(fā)階段,研發(fā)組織架構尤為重要,組織架構決定了出產效率、產品成本和開發(fā)成本。由機械轉型為軟件為主的IT、出行科技公司,必須進行有效的組織架構轉型。
來源:智能汽車開發(fā)者平臺 吳成東






