
導(dǎo)讀:在實(shí)現(xiàn)自動(dòng)駕駛汽車的控制過(guò)程中,會(huì)出現(xiàn)很多疑問(wèn)。比如控制車輛的轉(zhuǎn)向,是輸入方向盤轉(zhuǎn)角位置還是輸入扭矩?在進(jìn)行加減速行駛時(shí),是根據(jù)力度改變油門開(kāi)度嗎?在進(jìn)行剎車制動(dòng)時(shí),怎樣能精確控制制動(dòng)百分比數(shù)值?
實(shí)現(xiàn)這些信息交互,與車輛的底盤組件存在很大的關(guān)系。要了解自動(dòng)駕駛控制器與底盤組件之間信息交互關(guān)系,就要先了解車輛的底盤控制組件的原理。
一、線控底盤與自動(dòng)駕駛輔車相依
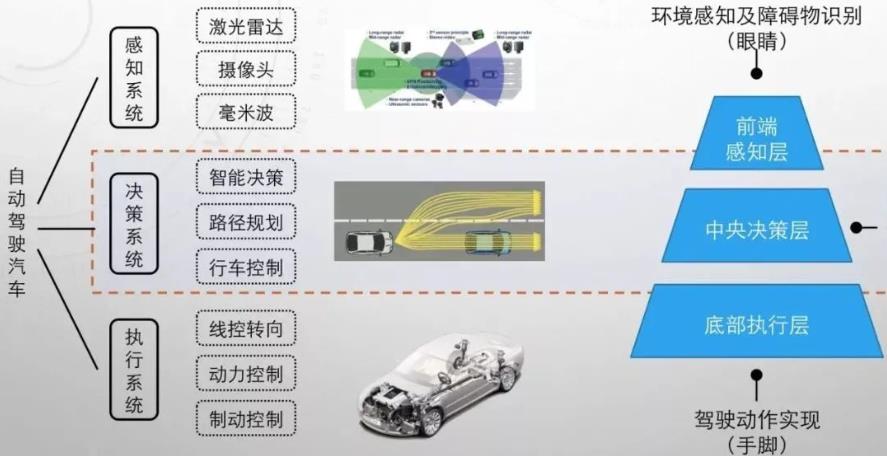
自動(dòng)駕駛的實(shí)現(xiàn),首先依賴感知傳感器對(duì)道路周邊環(huán)境信息進(jìn)行采集,包括攝像頭、激光雷達(dá)、毫米波雷達(dá)和超聲波等,采集的數(shù)據(jù)傳輸出到中央計(jì)算單元進(jìn)行計(jì)算,用來(lái)識(shí)別車輛周邊障礙物和可行駛區(qū)域,進(jìn)行路線規(guī)劃和控制,最后制定方向盤轉(zhuǎn)角和速度等信息,傳輸?shù)降妆P執(zhí)行機(jī)構(gòu),按照指令進(jìn)行精確執(zhí)行。
在整個(gè)控制過(guò)程中,底盤執(zhí)行機(jī)構(gòu)的功能要完善,系統(tǒng)響應(yīng)和精度要高。如果把自動(dòng)駕駛車輛比作人,那么底盤執(zhí)行機(jī)構(gòu)就是我們通常意義上的手和腳,用來(lái)做控制執(zhí)行,是自動(dòng)駕駛控制技術(shù)的核心部件,這對(duì)整個(gè)底盤系統(tǒng)的要求非常高。
最直觀的體現(xiàn),便是用于控制車輛方向的線控轉(zhuǎn)向。自動(dòng)換道在避險(xiǎn)回退過(guò)程中,常常出現(xiàn)回退過(guò)度甚至偏出本車道導(dǎo)致不安全,繼而系統(tǒng)又通過(guò)較大的回調(diào)力矩將車輛拉回車道中央。在自動(dòng)駕駛對(duì)中或駕駛員控制換道過(guò)程中,駕駛員緩慢施加力矩進(jìn)行方向盤控制時(shí),容易出現(xiàn)系統(tǒng)搶奪方向盤。
這些切實(shí)存在的問(wèn)題,嚴(yán)重影響自動(dòng)駕駛控制精度,延長(zhǎng)落地的時(shí)間。對(duì)于自動(dòng)駕駛而言,需要結(jié)合實(shí)際存在的問(wèn)題給出相應(yīng)的解決方案,不斷協(xié)調(diào)線控底盤和控制器之間的交互問(wèn)題,改進(jìn)線控底盤技術(shù),這無(wú)疑會(huì)大大促進(jìn)線控底盤的技術(shù)。
無(wú)疑,線控底盤是自動(dòng)駕駛的必要條件。
智能汽車的簡(jiǎn)單系統(tǒng)架構(gòu)
同樣,智能化、大數(shù)據(jù)網(wǎng)聯(lián)化給線控底盤發(fā)展帶來(lái)新的契機(jī)。
其一,智能汽車需要大量的、精確的底盤系統(tǒng)信號(hào)。而種類繁多的底盤傳感器,信號(hào)模式和處理方法各異,且大量傳感器信號(hào)匯入控制器對(duì)信號(hào)實(shí)時(shí)處理提出更高要求,因此亟需研究新型底盤域控制器,對(duì)多源傳感器信號(hào)實(shí)時(shí)處理、校驗(yàn)與解算理論。
其二,智能汽車直接前饋預(yù)瞄控制需要精確的車輛模型,逼近真實(shí)車輛動(dòng)力學(xué)狀態(tài)。而底盤車輛及輪胎動(dòng)力學(xué)呈現(xiàn)復(fù)雜非線性特性,因此亟需深入研究車輛復(fù)雜動(dòng)力學(xué)模型精確解算機(jī)制,促進(jìn)智能汽車的動(dòng)力學(xué)應(yīng)用發(fā)展。
其三,智能汽車在復(fù)雜場(chǎng)景下需要精度的感知狀態(tài),保證類駕駛員視角。因此亟需研究復(fù)雜交通場(chǎng)景下底盤動(dòng)力學(xué)域控制對(duì)車輛動(dòng)力學(xué)狀態(tài)的精確感知與預(yù)瞄技術(shù),探索車輛運(yùn)復(fù)雜動(dòng)力學(xué)穩(wěn)定邊界精確量化機(jī)制,消除高復(fù)雜、動(dòng)態(tài)交通環(huán)境的不確定性。
無(wú)疑,自動(dòng)駕駛是線控底盤的充分條件。
二、線控底盤概述
線控技術(shù)(X-By-Wire)源于飛機(jī)的控制系統(tǒng),其將飛行員的操縱命令轉(zhuǎn)化成電信號(hào)通過(guò)控制器控制飛機(jī)飛行。
線控汽車采用同樣的控制方式,可利用傳感器感知駕駛?cè)说鸟{駛意圖,并將其通過(guò)導(dǎo)線輸送給控制器,控制器控制執(zhí)行機(jī)構(gòu)工作,實(shí)現(xiàn)汽車的轉(zhuǎn)向、制動(dòng)、驅(qū)動(dòng)等功能,從而取代傳統(tǒng)汽車靠機(jī)械或液壓來(lái)傳遞操縱信號(hào)的控制方式。
線控底盤主要有五大系統(tǒng),分別為線控轉(zhuǎn)向、線控制動(dòng)、線控?fù)Q擋、線控油門、線控懸掛。從執(zhí)行端來(lái)看,線控油門、線控?fù)Q擋、線控空氣懸掛雖然技術(shù)都很成熟了,但最為關(guān)鍵的轉(zhuǎn)向和制動(dòng)系統(tǒng)目前還沒(méi)有一套可以適用于L4駕駛的穩(wěn)定的量產(chǎn)產(chǎn)品。
汽車底盤線控技術(shù)特征如下:
▲操縱機(jī)構(gòu)和執(zhí)行機(jī)構(gòu)沒(méi)有機(jī)械聯(lián)結(jié)和機(jī)械能量的傳遞;
▲操縱指令由傳感元件感知,以電信號(hào)的形式由網(wǎng)絡(luò)傳遞給電子控制器及執(zhí)行機(jī)構(gòu);
▲執(zhí)行機(jī)構(gòu)使用外來(lái)能源完成操縱指令及相應(yīng)的任務(wù),其執(zhí)行過(guò)程和結(jié)果受電子控制器的監(jiān)測(cè)和控制。
三、線控轉(zhuǎn)向
線控轉(zhuǎn)向,即Steer-By-Wire,能夠無(wú)束縛地得到無(wú)人駕駛進(jìn)行轉(zhuǎn)彎的指令目標(biāo)輸入和汽車的轉(zhuǎn)向輪的變化之間的關(guān)系,可以控制轉(zhuǎn)向機(jī)構(gòu)和行駛需要之間的關(guān)系,這樣能夠?qū)囕v進(jìn)行調(diào)節(jié)。其直接掌控著自動(dòng)駕駛路徑與方向的精確控制。
1、線控轉(zhuǎn)向發(fā)展歷程
自1894年乘用車安裝第1款現(xiàn)代意義上具備方向盤的轉(zhuǎn)向系統(tǒng)開(kāi)始,其轉(zhuǎn)向系統(tǒng)大致經(jīng)歷了5個(gè)階段:
1)早期的純機(jī)械轉(zhuǎn)向系統(tǒng);
2)福特最早提出的液壓助力轉(zhuǎn)向系統(tǒng);3)豐田首推的電子液壓助力轉(zhuǎn)向系統(tǒng);
4) 新一代的電動(dòng)助力轉(zhuǎn)向系統(tǒng);
5)擺脫機(jī)械連接的線控轉(zhuǎn)向系統(tǒng)和具有主動(dòng)轉(zhuǎn)向功能的前輪主動(dòng)轉(zhuǎn)向系統(tǒng)等。
1.1、電子液壓助力轉(zhuǎn)向(EHPS):
1)駕駛員在方向盤上施加轉(zhuǎn)動(dòng)力矩和角度;
2)方向盤帶動(dòng)轉(zhuǎn)向柱轉(zhuǎn)動(dòng);
3)轉(zhuǎn)向柱通過(guò)其底部和轉(zhuǎn)向機(jī)相連的齒輪齒條機(jī)構(gòu),將轉(zhuǎn)向柱的轉(zhuǎn)動(dòng)變?yōu)檗D(zhuǎn)向機(jī)齒條的橫向直線運(yùn)動(dòng);
4)轉(zhuǎn)向扭矩傳感器檢測(cè)到駕駛員輸入了方向盤扭矩;
5)根據(jù)駕駛員輸入的扭矩,以及車速等信息,ECU計(jì)算并控制電動(dòng)機(jī)帶動(dòng)轉(zhuǎn)向助力泵轉(zhuǎn)動(dòng),產(chǎn)生高壓液體;
6)液壓通過(guò)轉(zhuǎn)向油管傳遞到液壓助力轉(zhuǎn)向機(jī)上,液壓推動(dòng)液壓助力轉(zhuǎn)向機(jī)上的雙作用液壓缸的活塞,產(chǎn)生壓力,對(duì)齒條的橫向直線運(yùn)動(dòng)進(jìn)行助力;
7)轉(zhuǎn)向機(jī)兩端的轉(zhuǎn)向橫拉桿,通過(guò)推動(dòng)或拉動(dòng)轉(zhuǎn)向節(jié)來(lái)改變車輪的方向;
8)車輪與地面間產(chǎn)生橫向力,車輛轉(zhuǎn)向。

電子液壓助力轉(zhuǎn)向機(jī)構(gòu)
1.2、電動(dòng)助力轉(zhuǎn)向(EPS:Electronic Control Power Steering)
1)第一種是對(duì)轉(zhuǎn)向柱的轉(zhuǎn)矩進(jìn)行助力,這種叫C -EPS (Column - EPS);
2)第二種是對(duì)轉(zhuǎn)向柱底端的齒輪齒條機(jī)構(gòu)中的齒輪進(jìn)行助力,這種叫P - EPS(Pinion - EPS);
3)第三種是在轉(zhuǎn)向機(jī)上對(duì)齒條的直線運(yùn)動(dòng)進(jìn)行助力,這種叫R - EPS(Rack - EPS);而R - EPS根據(jù)傳動(dòng)的方式不同,又可以分為R-EPS,DP-EPS(雙小齒輪EPS)和BD-EPS(帶傳動(dòng)EPS)。
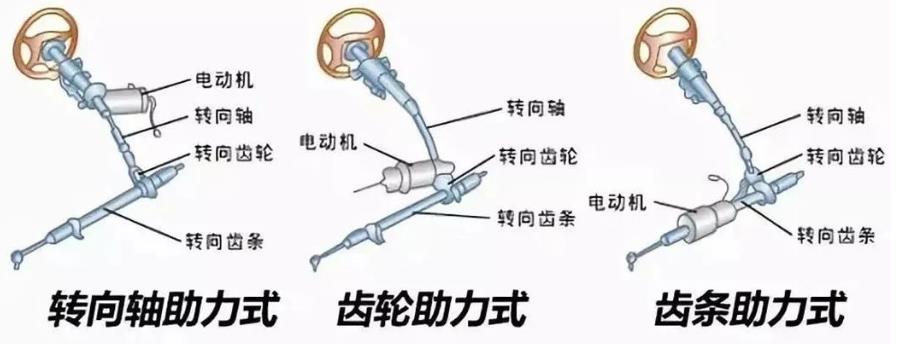
電動(dòng)助力轉(zhuǎn)向
1.3、線控轉(zhuǎn)向(SBW:Steering-By-Wire Systerm)
狹義上說(shuō),SBW系統(tǒng)特指沒(méi)有機(jī)械連接的轉(zhuǎn)向系統(tǒng),這是從系統(tǒng)的結(jié)構(gòu)上進(jìn)行的一個(gè)區(qū)分。但著眼于功能,從廣義說(shuō),任何能夠?qū)Ⅰ{駛員輸入和前輪轉(zhuǎn)角解耦的轉(zhuǎn)向系統(tǒng)都可以看成是 SBW系統(tǒng)。在此定義下,一般結(jié)構(gòu)如下圖。
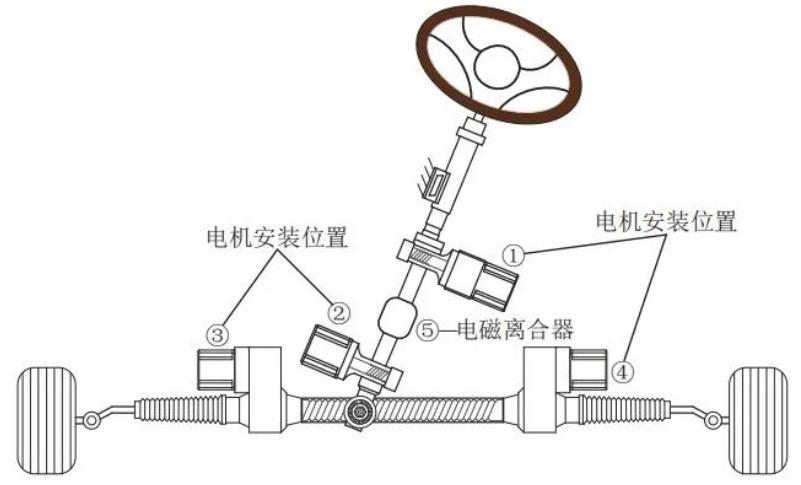
線控轉(zhuǎn)向系統(tǒng)結(jié)構(gòu)圖
其中① - ④為電機(jī)可能安裝位置,而⑤為電磁離合器。電磁離合器提供機(jī)械冗余,可實(shí)現(xiàn)轉(zhuǎn)向盤與車輪的機(jī)械解耦。根據(jù)有無(wú)⑤,SBW系統(tǒng)可以分為保留機(jī)械軟連接的 SBW系統(tǒng)和無(wú)機(jī)械連接的 SBW系統(tǒng)2大類。由此,人們研究雙電機(jī)安全冗余線控轉(zhuǎn)向系統(tǒng)。該方案包括轉(zhuǎn)向操縱機(jī)構(gòu)、轉(zhuǎn)向執(zhí)行機(jī)構(gòu)、電子線傳控制網(wǎng)絡(luò)、電源系統(tǒng)和各種輔助結(jié)構(gòu)。該方案將傳統(tǒng)的機(jī)械轉(zhuǎn)向與電子控制技術(shù)緊密結(jié)合起來(lái),線傳主動(dòng)轉(zhuǎn)向與機(jī)械操縱轉(zhuǎn)向兩種模式通過(guò)電磁離合器可任意切換,而且通過(guò)故障識(shí)別,機(jī)械操縱轉(zhuǎn)向可以作為線傳主動(dòng)轉(zhuǎn)向備份,提升安全性。
2、線控轉(zhuǎn)向主要研究?jī)?nèi)容
當(dāng)前,線控轉(zhuǎn)向系統(tǒng)的研究主要集中在 3 個(gè)方面:路感反饋控策略研究、轉(zhuǎn)向執(zhí)行控制策略研究以及故障診斷與容錯(cuò)控制策略研究。
2.1、路感反饋控制策略研究
由于線控轉(zhuǎn)向系統(tǒng)取消了方向盤和轉(zhuǎn)向車輪之間的機(jī)械連接,通過(guò)轉(zhuǎn)向角信號(hào)和轉(zhuǎn)向電機(jī)控制車輪轉(zhuǎn)向,導(dǎo)致路感無(wú)法直接反饋給駕駛員,這從駕駛安全性角度考慮是絕對(duì)不允許的。
針對(duì)這個(gè)問(wèn)題,線控轉(zhuǎn)向系統(tǒng)的方向盤總成中包含有路感模擬電機(jī),用來(lái)產(chǎn)生作用于方向盤的阻力矩以模擬路感。路感是一個(gè)比較抽象的定義,其定義之一是指駕駛員通過(guò)方向盤得到的車輛行駛中的轉(zhuǎn)向阻力矩,該阻力矩主要包含回正力矩和摩擦力矩2部分。其中,回正力矩是使車輪恢復(fù)到直線行駛位置的主要力矩之一,其數(shù)值的確定是車輛設(shè)計(jì)中的一個(gè)難題,通常由經(jīng)驗(yàn)、半經(jīng)驗(yàn)、統(tǒng)計(jì)或?qū)嶒?yàn)的方法獲得。回正力矩與車輛前輪的受力狀態(tài)存在直接關(guān)系,而前輪受力又和車輛實(shí)時(shí)的運(yùn)動(dòng)狀態(tài)及路面附著直接相關(guān)。因此,通常把總的回正力矩除以自方向盤到前輪總的力傳動(dòng)比近似得到的方向盤手力矩看成是路感。
就當(dāng)前的研究來(lái)看,路感通常采用基于經(jīng)驗(yàn)設(shè)計(jì)和基于模型設(shè)計(jì)這2種方法獲得。
基于經(jīng)驗(yàn)設(shè)計(jì)的方法,通常是將路感設(shè)計(jì)為方向盤轉(zhuǎn)角、車速、橫擺角速度等參數(shù)的非線性函數(shù)關(guān)系式,在不同條件下為駕駛員提供不同的路感,簡(jiǎn)單高效,但是自適應(yīng)性和精度較差。
基于動(dòng)力學(xué)模型的方法,是通過(guò)參考傳統(tǒng)車輛路感產(chǎn)生的動(dòng)力學(xué)原理建立相關(guān)的動(dòng)
力學(xué)模型,根據(jù)車輛的動(dòng)態(tài)響應(yīng)、駕駛員的方向盤輸入等計(jì)算與路感相關(guān)的輪胎力、摩擦力矩等,最終計(jì)算出路感。
獲得期望的轉(zhuǎn)向阻力矩,剩下的工作就是控制路感反饋電機(jī)達(dá)到期望的力矩。最常用的算法是PID算法。
2.2、轉(zhuǎn)向執(zhí)行研究
SBW系統(tǒng)的轉(zhuǎn)向執(zhí)行控制策略可以分為上層策略和下層策略 2 部分。其中,上層策略根據(jù)當(dāng)前車輛的狀態(tài)和駕駛員的輸入,在盡量滿足控制目標(biāo)和約束條件的情況下,計(jì)算出期望的前輪轉(zhuǎn)角;而下層策略則是由轉(zhuǎn)向控制器控制轉(zhuǎn)向電機(jī)執(zhí)行該指令,快速、準(zhǔn)確地達(dá)到該目標(biāo)轉(zhuǎn)角。
由于線控轉(zhuǎn)向系統(tǒng)的靈活性,衍生出很多控制算法。總體而言,算法可以總結(jié)為基于經(jīng)驗(yàn)設(shè)計(jì)的方法和基于動(dòng)力學(xué)模型計(jì)算的方法這 2 大類。
基于經(jīng)驗(yàn)設(shè)計(jì)的方法主要是根據(jù)車輛在不同工況下對(duì)操縱穩(wěn)定性要求的不同來(lái)進(jìn)行設(shè)計(jì)。在低速工況下,汽車應(yīng)具有不沉重而適度的轉(zhuǎn)向盤力與不過(guò)于大的方向盤轉(zhuǎn)角,還應(yīng)具有良好的回正性能;高速、低側(cè)向加速度工況下,汽車應(yīng)具有良好的橫擺角速度頻率特性、直線行駛能力、回正性能和較大的轉(zhuǎn)向靈敏度,且轉(zhuǎn)向盤力不宜過(guò)小而應(yīng)維持在一定數(shù)值,以給駕駛者穩(wěn)定的路感。
基于動(dòng)力學(xué)模型計(jì)算的方法旨在提高車輛的穩(wěn)定性。因此,也有研究人員將這種方法歸結(jié)為車輛穩(wěn)定性控制方法。其基本思路是根據(jù)當(dāng)前車輛狀態(tài)、外界環(huán)境和駕駛員輸入提出控制目標(biāo),然后根據(jù)控制目標(biāo)計(jì)算參考前輪轉(zhuǎn)角,控制前輪轉(zhuǎn)角改變輪胎側(cè)向力,對(duì)橫擺力矩進(jìn)行補(bǔ)償。
2.3、故障診斷與容錯(cuò)控制
在線控轉(zhuǎn)向中,轉(zhuǎn)向的動(dòng)力來(lái)源于電機(jī)主要包括了兩方面:用來(lái)給駕駛員提供轉(zhuǎn)向時(shí)的路感和動(dòng)力。電機(jī)的可靠性是研究者們首先要考慮的因素,電機(jī)和控制器的容錯(cuò)就體現(xiàn)的十分重要。實(shí)時(shí)監(jiān)測(cè)技術(shù)和設(shè)置冗余硬件是保證控制器穩(wěn)定運(yùn)行的兩種手段,故而可以實(shí)現(xiàn)容錯(cuò)控制,線控轉(zhuǎn)向的運(yùn)行的品質(zhì)得到了保證,根據(jù)控制器與電機(jī)之間的控制關(guān)系,可以對(duì)電機(jī)出現(xiàn)故障時(shí)所需要的補(bǔ)償控制進(jìn)行相關(guān)研究,那樣就為能夠在最大限度上保證線控轉(zhuǎn)向的可靠性提供了可能。
3、線控轉(zhuǎn)向的應(yīng)用
從全球競(jìng)爭(zhēng)格局來(lái)看,博世、采埃孚、捷太格特、NSK、耐世特等國(guó)際巨頭有成熟的線控轉(zhuǎn)向產(chǎn)品和技術(shù),但在商業(yè)化方面仍然遇到了瓶頸。

圖片:參考佐思汽車研究
2020年以后,L3級(jí)自動(dòng)駕駛進(jìn)入量產(chǎn)將拉動(dòng)線控系統(tǒng)產(chǎn)品商業(yè)化,那些率先在中國(guó)市場(chǎng)布局的外資企業(yè)會(huì)有先發(fā)優(yōu)勢(shì)。縱觀國(guó)內(nèi)市場(chǎng),在線控技術(shù)上有所作為的中國(guó)本土企業(yè)寥寥無(wú)幾,且規(guī)模相對(duì)較小。
四、線控制動(dòng)
線控制動(dòng),即Brake-By-Wire,在線控底盤技術(shù)中是難度最高的,但也是最關(guān)鍵的技術(shù)。線控制動(dòng)系統(tǒng)掌控著自動(dòng)駕駛的底盤安全性和穩(wěn)定控制,只有擁有足夠好的制動(dòng)性能(包括響應(yīng)速度快、平順性好等),才能為我們的安全提供良好保障。
1、線控制動(dòng)發(fā)展歷程
乘用車的線控系統(tǒng)自威廉·邁巴赫于1900 年發(fā)明鼓式制動(dòng)器起,至今已有120年的歷史,期間誕生了多種形式的制動(dòng)系統(tǒng)。
其發(fā)展大致可以劃分為以下5 個(gè)階段:
1)采用人力的純機(jī)械制動(dòng)和液壓制動(dòng)系統(tǒng);
2)兼用人力和發(fā)動(dòng)機(jī)動(dòng)力作為制動(dòng)力源的伺服制動(dòng)系統(tǒng);
3)發(fā)動(dòng)機(jī)提供所有制動(dòng)力源的動(dòng)力制動(dòng)系統(tǒng);
4)以 ABS、TCS、ESC 等為代表的成熟的電液制動(dòng)系統(tǒng);
5)以電子駐車制動(dòng)系統(tǒng)
(electric parking brake, EPB)、電控液壓制動(dòng)
(electric hydraulic brake, EHB)、電子機(jī)械制動(dòng)系統(tǒng)
(electric mechanical brake, EMB) 等為代表的 BBW系統(tǒng)。
1.1、電子駐車制動(dòng)系統(tǒng)(EPB:Electrical Park Brake)
1)駕駛員拉起EPB開(kāi)關(guān);
2)EPB控制器接收到指令,控制制動(dòng)卡鉗上的Actuator中的電機(jī),電機(jī)通過(guò)傳動(dòng)機(jī)構(gòu)推動(dòng)Spindle;
3)Spindle推動(dòng)活塞,產(chǎn)生壓力,將摩擦片壓緊到制動(dòng)盤上;
4)摩擦片在垂直壓力下,和制動(dòng)盤間產(chǎn)生靜摩擦力,保持車輛靜止。

電子駐車制動(dòng)系統(tǒng)
1.2、電控液壓制動(dòng)系統(tǒng)(EHB:electro-hydraulic control system)
EHB 沒(méi)有了真空助力器,結(jié)構(gòu)更簡(jiǎn)單緊湊;電動(dòng)驅(qū)動(dòng),響應(yīng)也更加迅速;方便實(shí)現(xiàn)四輪制動(dòng)分別控制;容易集成ABS (Anti-lock Braking System), TCS (Traction Control System) 以及 ESC (Electric Stability Control)等輔助功能,兼容性強(qiáng);踏板解耦,能夠主動(dòng)制動(dòng)以及能量回收。EHB 系統(tǒng)仍保留了傳統(tǒng)的液壓管路部分,是電子和液壓相結(jié) 合的 產(chǎn)物。
典型帶有E-Booster的EHB系統(tǒng)如圖所示。踏板位移和踏板力經(jīng)電子傳感器傳導(dǎo)給電子 ECU,然后經(jīng)過(guò)不同的助力形式,如電動(dòng)液壓泵高壓蓄能器或者直流電機(jī)等推動(dòng)建立起液壓,液壓再分配給四個(gè)制動(dòng)輪缸。
工作過(guò)程為:
1)駕駛員踩下制動(dòng)踏板,輸入機(jī)械力;
2)E-Booster通過(guò)電機(jī)和泵對(duì)駕駛員的輸入進(jìn)行助力(boost);
3)制動(dòng)主缸將駕駛員的輸入力和E-Booster的助力轉(zhuǎn)化成制動(dòng)系統(tǒng)液壓;
4)主缸液壓通過(guò)制動(dòng)硬管和軟管傳遞至每一個(gè)車輪的制動(dòng)卡鉗輪缸;
5)液壓推動(dòng)輪缸的活塞,產(chǎn)生壓力,將摩擦片壓緊到旋轉(zhuǎn)的制動(dòng)盤上;
6)摩擦片在垂直壓力的作用下,產(chǎn)生摩擦力和制動(dòng)力矩,對(duì)整車進(jìn)行制動(dòng)。
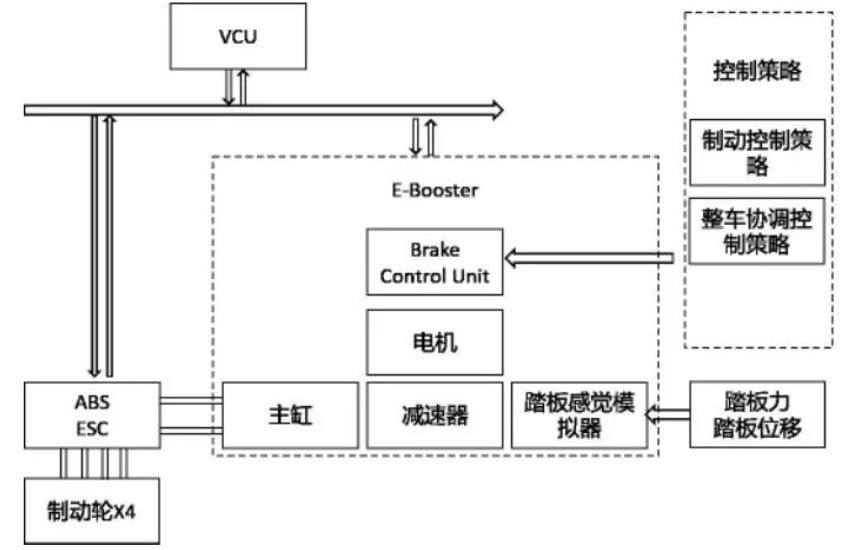
電控液壓制動(dòng)系統(tǒng)
1.3、電子機(jī)械制動(dòng)系統(tǒng) (EMB:Electro-Mechanical Braking System)
電子機(jī)械制動(dòng) EMB 系統(tǒng)結(jié)構(gòu)顯得更簡(jiǎn)潔了,取消了制動(dòng)系統(tǒng)的液壓備份部分,踏板信號(hào)與執(zhí)行器之間完全靠電子信號(hào)傳輸,與 ABS、TCS、ESC 等模塊配合實(shí)現(xiàn)車輛底盤的集成控制, 是真正的線控制動(dòng)系統(tǒng)。EMB 結(jié)構(gòu)精簡(jiǎn),能夠降低整車質(zhì)量,易于維護(hù),便于安裝調(diào)試;完全解耦,制動(dòng)響應(yīng)更加迅速;便于底盤域控制及智能駕駛技術(shù)發(fā)展。
踏板信號(hào)以及車輛信號(hào)首先傳導(dǎo)到 ECU,決策后再向4個(gè)車輪制動(dòng)模塊發(fā)出制動(dòng)指令。車輪制動(dòng)模塊上的電機(jī)驅(qū)動(dòng)制動(dòng)摩擦材料塊,然后實(shí)現(xiàn)摩擦制動(dòng)。每一個(gè)車輪都有一個(gè)制動(dòng)模塊,可以單獨(dú)分別控制,每個(gè)模塊的驅(qū)動(dòng)電機(jī)也都有單獨(dú)的電機(jī)控制器。4個(gè)模塊作用下,實(shí)現(xiàn)制動(dòng)力分配,制動(dòng)穩(wěn)定性控制等功能。
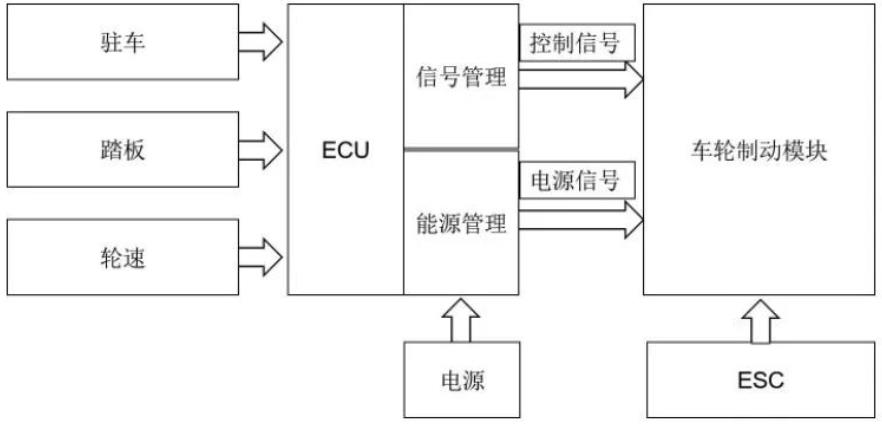
電子機(jī)械制動(dòng)系統(tǒng)
2、線控制動(dòng)主要研究?jī)?nèi)容
當(dāng)前,線控制動(dòng)系統(tǒng)的研究主要集中在 3 個(gè)方面:踏板模擬、主動(dòng)制動(dòng)和制動(dòng)能量回收。
2.1、踏板模擬
BBW系統(tǒng)取消了踏板和主缸之間的機(jī)械連接,踏板力需要用通過(guò)模擬器或算法模擬的方式提供給駕駛員,踏板力模擬的好壞決定了 BBW系統(tǒng)品質(zhì)的優(yōu)劣。目前主要的研究集中在實(shí)驗(yàn)方法,一般是通過(guò)對(duì)大量的實(shí)驗(yàn)數(shù)據(jù)進(jìn)行分析歸納,得到踏板力與踏板行程和車輛狀態(tài)之間的關(guān)系,通過(guò)彈簧或作動(dòng)器對(duì)踏板力進(jìn)行模擬。
2.2、主動(dòng)制動(dòng)
上層策略根據(jù)當(dāng)前車輛狀態(tài)和駕駛員操作,向 BBW系統(tǒng)發(fā)出制動(dòng)請(qǐng)求,BBW系統(tǒng)則需要準(zhǔn)確、快速地響應(yīng)這個(gè)請(qǐng)求。主動(dòng)制動(dòng)旨在提高車輛的穩(wěn)定性和安全性,高級(jí)駕駛輔助系統(tǒng)(ADAS)、緊急制動(dòng)系統(tǒng) (AEB)及自動(dòng)駕駛等都使用到了這一功能。目前,所有關(guān)于主動(dòng)制動(dòng)的研究基本分為基于經(jīng)驗(yàn)設(shè)計(jì)的方法和基于動(dòng)力學(xué)模型計(jì)算的方法。幾乎所有常見(jiàn)的控制算法都可以其中找到應(yīng)用,如PID算法、最優(yōu)控制、魯棒控制、滑模控制、模糊控制、神經(jīng)網(wǎng)絡(luò)控制、模型預(yù)測(cè)控制。
2.3、制動(dòng)能量回收
制動(dòng)能量回收系統(tǒng)的中協(xié)調(diào)分配電制動(dòng)力矩和制動(dòng)力矩是關(guān)鍵技術(shù)之一, 控制策略的研究基本圍繞這一點(diǎn)展開(kāi)。
3、線控制動(dòng)系統(tǒng)應(yīng)用

圖片:參考佐思汽車研究
目前 EHB 有著不同的實(shí)現(xiàn)形式,按照是否集成ESC、ABS 等功能的一體化形式,分為 One-Box 形式和 Two-Box 形式。One-Box 為EHB集成了ABS/ESP,只有一個(gè)ECU。而Two-Box需要協(xié)調(diào)EHB ECU和ESP ECU的關(guān)系。
五、線控驅(qū)動(dòng)
線控驅(qū)動(dòng),即Throttle-By-Wire,作為最成熟的線控技術(shù)之一,可通過(guò)直接扭矩通訊、偽油門安裝、節(jié)氣門調(diào)節(jié)等方法實(shí)現(xiàn)。針對(duì)開(kāi)放發(fā)動(dòng)機(jī)和電機(jī)扭矩通信接口協(xié)議的車輛,線控驅(qū)動(dòng)控制器直接通過(guò)控制器局域網(wǎng)絡(luò) (CAN) 向發(fā)動(dòng)機(jī)或者電機(jī)發(fā)送目標(biāo)扭矩請(qǐng)求,實(shí)現(xiàn)整車加速度控制。此種方案無(wú)需進(jìn)行機(jī)械改裝,結(jié)構(gòu)簡(jiǎn)單可靠。
針對(duì)不開(kāi)放扭矩通信接口協(xié)議的車輛,安裝節(jié)氣門調(diào)節(jié)機(jī)構(gòu)或者偽油門也可實(shí)現(xiàn)線控驅(qū)動(dòng)功能。控制器根據(jù)車輛狀態(tài)、加速踏板開(kāi)度及其變化速率,利用內(nèi)部算法程序預(yù)判駕駛員需求功率或轉(zhuǎn)矩,然后通過(guò)電信號(hào)控制執(zhí)行電機(jī)的動(dòng)作,調(diào)節(jié)發(fā)動(dòng)機(jī)節(jié)氣門開(kāi)度,進(jìn)而改變發(fā)動(dòng)機(jī)輸出扭矩和功率。
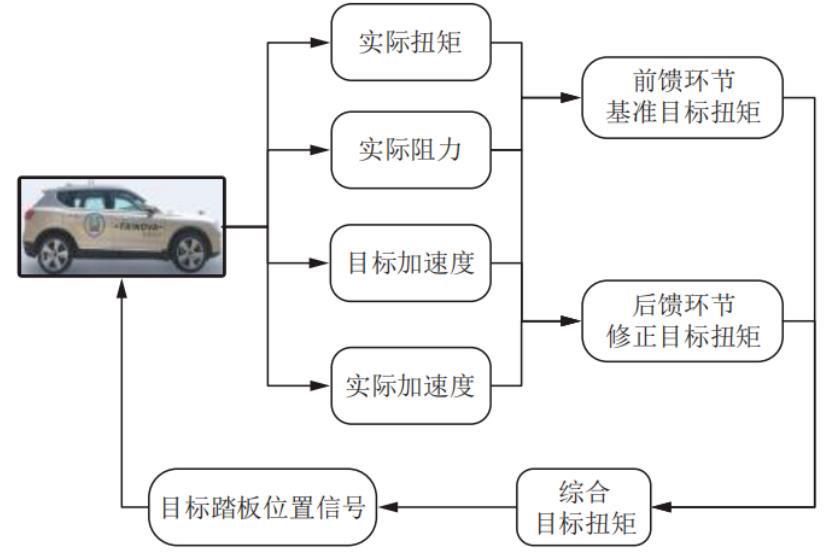
典型線控驅(qū)動(dòng)控制圖
來(lái)源:汽車人手記 作者:專注的汽車人






