
摘要:AVP,全稱Automated Valet Parking,中文名“自主代客泊車系統”。作為自動駕駛在泊車場景下的應用,AVP實現的是全自動代客泊車功能,最終目標是取代傳統的人工代客泊車,幫助用戶節省大量的停車時間,解決高峰期排隊停車的痛點。

AVP作為當前泊車場景的功能天花板,涉及的細分場景復雜,技術難度大,并且對保證車輛安全性來說,也是巨大的挑戰。因此,目前我們可以看到行業內已經有一些Demo演示版的AVP出現,但還沒有量產的產品面世。 那么.代表當前自動泊車技術最高水平的AVP功能,它的原理和背后的關鍵技術是什么呢?難點在哪里?本文將給出詳細解讀,解開AVP的面紗。

圖1:AVP宣傳圖
一、AVP功能原理
典型的AVP功能完整流程是: (1)用戶到達停車場入口或附近,通過手機端開啟AVP 功能,用戶可以離開車輛.去吃飯、逛街、開會等; (2)車輛接收到AVP功能啟用指令,自行進入停車場,在停車場中找到可用的車位,并停在車位上; (3)用戶需要用車的時候,通過手機端遠程發出召喚,指定自己需要上車的位置; (4)車輛接收到召喚指令后,自行離開停車位,駛出停車場,到達指定位置,用戶上車。
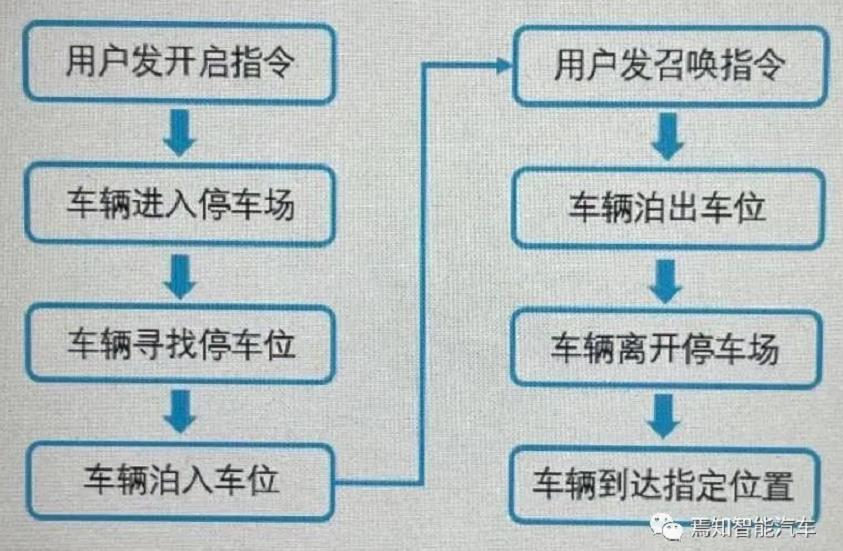
圖2:AVP功能的全流程圖示
從功能流程中可以看出,AVP的完整功能可以拆解為四項關鍵子功能:一是手機與車輛的互聯:二是車輛在停車場內尋找車位;三是車輛自動泊入車位四是遠程召喚車輛。
1.1 機-車互聯
手機與車輛的互聯,是AVP功能的基礎,只有用戶能離開車輛,并通過手機遠程給車發指令,AVP 才能真正地給用戶帶來便捷。
要做到這一點并不困難,目前很多汽車都具備了手機智能互聯與控制的功能,并有自家品牌專有的APP作為入口:典型案例如手機鑰匙、車內溫度控制,特斯拉的哨兵模式、智能召唉、小鵬的遙控泊車等。
那么,機-車互聯的原理是什么呢?
手機與汽車互聯的系統包括4個部分:車載控制器與網關,T-BOX,后臺,手機APP。
T-BOX是遠程信息處理器的簡稱(Telematics BOX),主要用于車輛和后臺系統及手機APP 通信,實現手機APP的車輛信息顯示與控制。
當用戶通過手機端APP 發送控制指令后,手機訪問后臺(一般是云端服務器),云端服務器將用戶的指令傳遞到車載T-BOX,T-BOX再通過車輛總線(CAN/Ethemet)將指令傳到對應的車載控制器。對于AVP功能,此處特指AVP功能的控制器。
從操作層面上,手機端通過APP訪問云端服務器,通過網絡模塊建立與車輛OBD和控制器的聯系,從而激活AVP功能,控制車輛開始自主代客泊車模式:
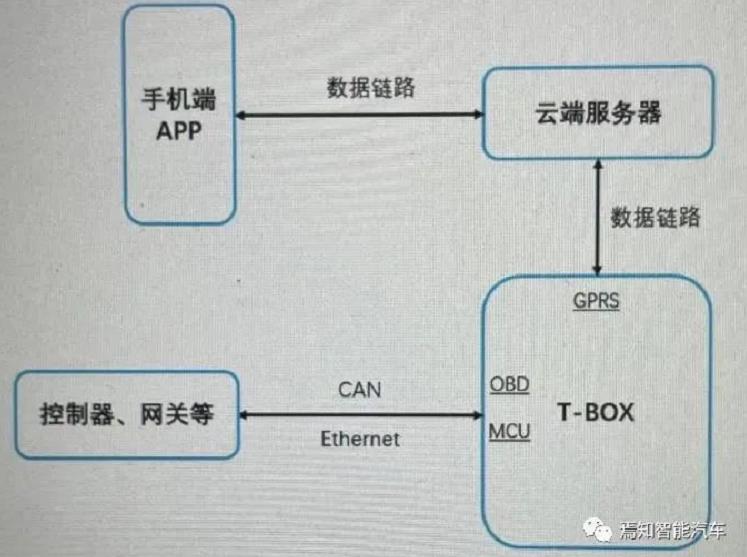
圖3:機-車互聯系統的組成
1.2 尋找車位
進入停車場,并在停車場內自動尋找車位,是AVP功能的核心。在沒有任何控制的情況下,車輛如何在停車場內自動、準確地尋找到可停的車位,是AVP的重點和難點。
目前尋找車位的方案有兩種技術路線,一種是純車端路線,即讓車輛在停車場內邊行駛邊搜索車位,一旦搜索到可用的車位,就停下來準備泊入車位:另一種是車-場端結合的路線、即停車場內安裝設備,將可用的車位信息和停車場內其他信息如障礙物等,發送給車輛,車輛將場端給定的車位作為終點,規劃好行駛路徑,直接開到終點。

圖4:AVP尋找車位車端方案

圖5:AVP尋找車位場端方案
在尋找車位的過程中,涉及到路徑規劃、車位識別、避障、字符識別等功能。
對于純車端方案,路徑規劃即車輛自行規劃搜索車位的前進路線,與傳統的人工尋找車位思路一樣,需要結合周邊場景,邊前進邊規劃;對于車-場端結合的方案,路徑規劃指規劃從當前位置到目標停車位的路徑,然后車輛直接按該路徑行駛即可。
車位識別功能需要車輛能夠自主識別各種類型的車位。通常會從不同的維度來劃分車位類型,維度包括車位方向、車位標線、車位字符等等。

表1:停車位類型
避障,是指車輛在尋找車位過程中,識別出周邊所有的障礙物,并能及時通過加減速、轉向或停車等工作,避開障礙物,確保安全、高效行駛。障礙物主要包括靜態障礙物和動態障礙物,在車-場端結合的方案中,障礙物還可以由場端的設備.實時傳輸給車輛,提升避障的準確率和效率。
表2:總結了常見的障礙物類型,車輛需要能夠識別出這些常規障礙物。
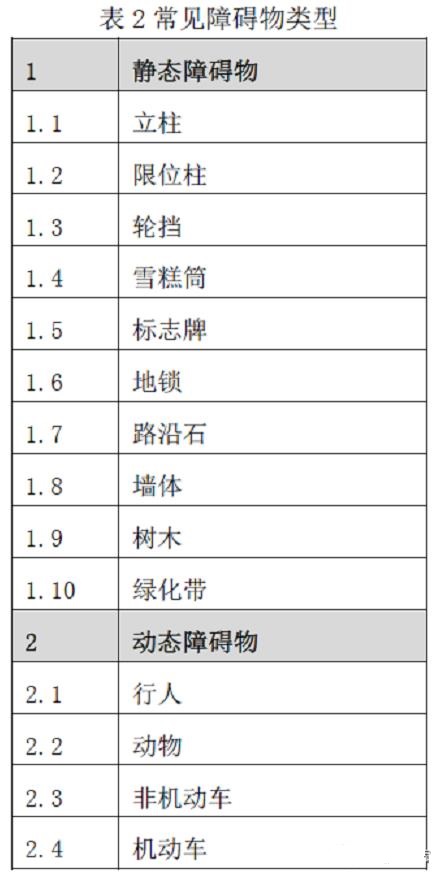
表2:常見障礙物類型
字符識別.是指車輛能夠識別,在行駛過程中遇到的標識牌、地面、立柱等標注的字符,如直行與轉向箭頭、道路線、斑馬線、車位號、特殊車位標識等,車輛需要通過這些字符標識,決策自己的行駛動作,并確認車位可用性。
1.3 泊入車位
尋找并確認車位后,開始自動泊入車位,這一過程與傳統的自動泊車功能一樣、通過規劃泊入路徑并控制車輛按路徑倒車.完成泊入車位的工作。
1.4 召喚車輛
遠程召喚車輛的全過程,是車輛自動泊車的相反過程。用戶通過手機發出指令后,車輛自動從車位駛出,到達指定位置,完成AVP的全過程。
二、AVP關鍵技術
從AVP的基本原理可以看出,AVP功能的實現,涉及車聯網、感知識別、同步定位、規劃控制等多個領域,其中涉及的關鍵技術有高精地圖、SLAM、融合感知、融合定位、路徑規劃等。
2.1 高精地圖
高精地圖又稱高分辨率地圖(HD Map.High Definition Map),是一種專門為無人駕駛服務的地圖。對于AVP功能來說,高精地圖主要指停車場的高精地圖:通過格式化存儲停車場內的各種交通要素,高精地圖可以告知車輛完整的、高精度、精細化的停車場內部信息,包括高精度的坐標、準確的停車位、通道、立柱、標志牌、地面線等信息。
高精地圖的絕對精度一般都會在亞米級,以高德地圖為例,絕對精度可以達到10厘米以內,而且橫向的相對精度往往還要更高。
可以說,高精地圖存儲了停車場的所有交通信息,是車輛規劃行駛路徑和定位的基礎。目前國內可以提供高精地圖的圖商主要有高德、百度、四維圖新等大廠。
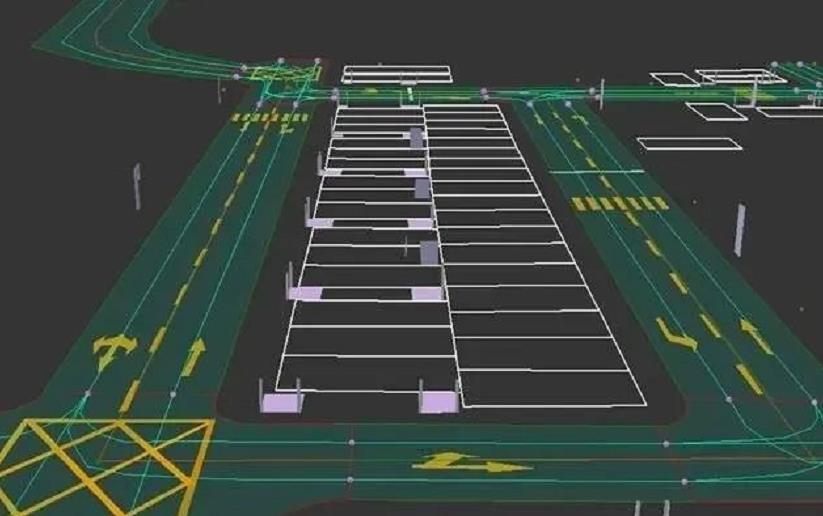
圖6:高精地圖
2.2 SLAM SLAM
全稱SimultaneousLocalization And Mapping,即同步定位與建圖技術。
SLAM是除高精地圖外的另一種構建地圖方法:車輛在一個初次到達的停車場中,一邊移動,一邊根據位置和環境感知的結果進行自身定位,同時在自身定位的基礎上建造增量式地圖,實現車輛的自主定位和導航。
目前的主流SLAM 主要靠視覺語義實現,即通過攝像頭識別周圍環境,經過語義分析,確認當前環境,并完成定位與建圖。但隨著激光雷達量產上車,激光SLAM或將成為新的主流。
2.3 融合感知
毫無疑問,環境感知是自動駕駛的重中之重,當然也是AVP的重難點。
眾所周知,攝像頭、毫米波雷達、激光雷達等不同類別的感知傳感器,都存在各自的優勢與不足,因此將多個傳感器的感知結果進行融合,優勢互補,可以提升感知的精度和準確度。
目前多傳感器融合已經成為自動駕駛的發展趨勢。通過融合多種攝像頭和雷達的感知結果,車輛可以更加精確地識別周邊環境,并實現場景重構。
對于AVP來說、前視攝像頭、側視攝像頭、環視攝像頭、毫米波雷達、激光雷達、超聲波雷達等傳感器的感知結果,都可以進行融合處理。融合后的感知結果,將大大提升環境識別的效果。
2.4 融合定位
傳統車輛的定位主要依賴于GNSS,即全球導航衛星系統,如GPS、北斗等。但GNSS的定位精度只有米級,無法滿足自動駕駛的定位需求;同時對于AVP來說,地下車庫中無法覆蓋衛星信號、傳統CNSS定位會失效。
因此、GNSS+IMU+SLAM的融合定位方式,是目前AVP 實現精準定位的不二之選。通過三者的信息融合,可以實現厘米級的定位精度,并且準確性也能得以保證。
另外,在車-場端結合的方案中,可以利用車-場互聯,實現車輛在停車場內位置的實時同步,更進一步地提升了定位效果。
2.5 路徑規劃
此處的路徑規劃,特指車輛泊入車位時,規劃泊車路線。泊車路徑規劃是一個相對復雜的規劃問題,涉及障礙物和車輛的軌跡預測、可行駛區域選擇、局部軌跡規劃和車輛控制等內容。不同的規劃算法,會得到完全不同的自動泊車效果,目前各路玩家仍在不斷優化自己的泊車路徑規劃算法,以求達到更好的效果。
三、AVP的發展現狀
從上文我們可以看出,AVP的愿景是美好的,但受限于當前的技術水平,距離完全意義上的量產AVP仍有一定的距離。
與目前已經量產的自動泊車功能相比,AVP是更高級別的自動泊車,可以認為:當前的自動泊車是AVP的基礎。
目前的量產車型中,大部分車型都可以做到最基礎的APA,即自動泊入泊出;小鵬、威馬等新勢力,也實現了簡單的HPA即記憶泊車功能,HPA可以理解為AVP功能的過渡版,適用于單一、指定的停車場和停車位。

表3:各級自動泊車功能的現狀
雖然 AVP 距離完全落地還有一段較長的路要走,但是作為點到點的自動出行中較為關鍵的起點和終點階段,AVP是將各路玩家的必爭之地。 從目前行業內的動態來看,大家都在為AVP的量產落地而努力著,相信隨著關鍵技術的突破與成熟,AVP會在不久的將來,得到大規模普及和應用。
來源:焉知智能汽車






