
導(dǎo)讀:隨著深度學(xué)習(xí)和計(jì)算機(jī)視覺(jué)技術(shù)的興起,自動(dòng)駕駛為提升交通安全與效率提供了新的解決方案。未來(lái)的自動(dòng)駕駛汽車擁有全面的駕駛感知系統(tǒng),可以識(shí)別道路交通標(biāo)志、汽車、行人、路況等外部人和物,智能的決策系統(tǒng)對(duì)感知的信息快速處理和分析,執(zhí)行系統(tǒng)精確的執(zhí)行加速、制動(dòng)、停車、轉(zhuǎn)向等命令。

自動(dòng)駕駛汽車測(cè)試是自動(dòng)駕駛研發(fā)中的重要環(huán)節(jié),也是自動(dòng)駕駛技術(shù)發(fā)展的重要支撐,隨著智能網(wǎng)聯(lián)汽車高等級(jí)的自動(dòng)化和網(wǎng)聯(lián)化系統(tǒng)不斷產(chǎn)業(yè)化落地,對(duì)測(cè)試的依賴越來(lái)越深入,尤其是面對(duì)即將量產(chǎn)落地的L3級(jí)以上自動(dòng)駕駛產(chǎn)品,對(duì)現(xiàn)有的測(cè)試技術(shù)、標(biāo)準(zhǔn)和法規(guī),都提出了新的挑戰(zhàn),需要新的技術(shù)突破。
自動(dòng)駕駛汽車本身結(jié)合了車輛技術(shù),人工智能,模式識(shí)別,5G通訊,傳感器融合等多領(lǐng)域,跨學(xué)科知識(shí)。跟傳統(tǒng)的汽車測(cè)試有很大不相同,為了應(yīng)對(duì)千變?nèi)f化的交通場(chǎng)景,需要海量的數(shù)據(jù)對(duì)自動(dòng)駕駛算法進(jìn)行訓(xùn)練,通過(guò)不斷的迭代,才能覆蓋盡可能多的場(chǎng)景。并且測(cè)試會(huì)貫穿車輛的生命周期,即使車輛已經(jīng)賣出,并上路行駛,也會(huì)定期遠(yuǎn)程升級(jí),以便覆蓋新的場(chǎng)景。
一、自動(dòng)駕駛汽車測(cè)試類型及測(cè)試內(nèi)容是什么?
自動(dòng)駕駛汽車的測(cè)試伴隨著車輛開(kāi)發(fā)的全流程,包括對(duì)標(biāo)測(cè)試、軟件在環(huán)(SIL,即software-in-loop)、硬件在環(huán)(HIL,即hardware-in-loop)、車輛在環(huán)(VIL,即vehicle-in-loop),系統(tǒng)標(biāo)定、再到最后的整車場(chǎng)地、道路測(cè)試等方法,涵蓋了從零部件到系統(tǒng)再到整車的全鏈條驗(yàn)證。

二、數(shù)據(jù)采集在自動(dòng)駕駛開(kāi)發(fā)中扮演什么樣的角色?
眾所周知,自動(dòng)駕駛的發(fā)展和人工智能技術(shù)進(jìn)步密不可分,數(shù)據(jù)、算力和算法作為人工智能的三要素顯著影響著自動(dòng)駕駛技術(shù)的嫻熟程度,而在這三要素中,數(shù)據(jù)有著舉足輕重的作用。
自動(dòng)駕駛時(shí)代,訓(xùn)練數(shù)據(jù)集非常重要,但是成本也比較高。訓(xùn)練數(shù)據(jù)集的構(gòu)建分車端、本地端和云端三個(gè)環(huán)節(jié)。訓(xùn)練數(shù)據(jù)集海量數(shù)據(jù)的存儲(chǔ)和處理是一個(gè)非常大的挑戰(zhàn),數(shù)據(jù)集的“清洗”提純也是一個(gè)挑戰(zhàn)。
AI只有經(jīng)過(guò)大量的訓(xùn)練,神經(jīng)網(wǎng)絡(luò)才能總結(jié)出規(guī)律,應(yīng)用到新的樣本上。如果現(xiàn)實(shí)中出現(xiàn)了訓(xùn)練集中從未有過(guò)的場(chǎng)景,則網(wǎng)絡(luò)會(huì)基本處于瞎猜?tīng)顟B(tài),從而出現(xiàn)錯(cuò)誤,因此可靠并且高質(zhì)量的數(shù)據(jù)采集在自動(dòng)駕駛開(kāi)發(fā)過(guò)程中承擔(dān)的作用就顯得尤為重要,不可或缺。
為了保證數(shù)據(jù)采集的準(zhǔn)確性,智能駕駛的數(shù)據(jù)采集車輛搭載了攝像頭、雷達(dá)等大量不同的傳感器。這些傳感器從整車布置的安裝結(jié)構(gòu)設(shè)計(jì)、FOV校核,再到實(shí)車的裝配標(biāo)定,都需要保證位置準(zhǔn)確和穩(wěn)定,從而支持不同位置傳感器數(shù)據(jù)可以順利拼接。
實(shí)車采集過(guò)程中,需要盡可能覆蓋各種用戶場(chǎng)景。一般來(lái)說(shuō),道路狀態(tài)、交通信號(hào)和標(biāo)識(shí)、各類車輛和行人目標(biāo)、天氣環(huán)境等,都是影響智能駕駛的關(guān)鍵因素,路試采集場(chǎng)景需要涵蓋城市、鄉(xiāng)村、高速、隧道以及白天和夜晚等,以確保盡可能覆蓋用戶各種實(shí)際場(chǎng)景。
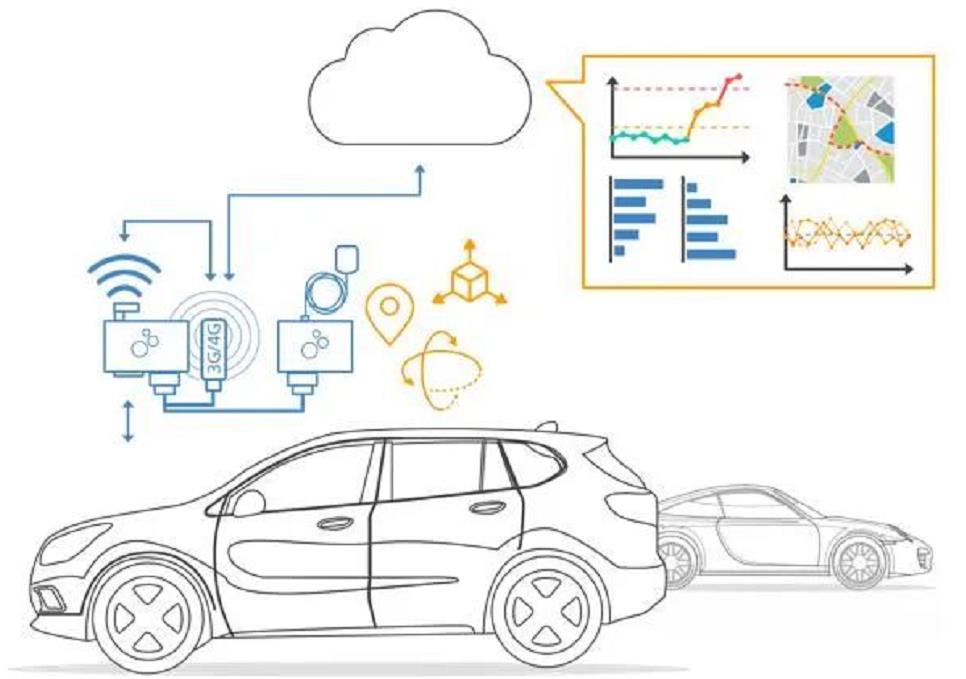
采集過(guò)程中,全面的了解測(cè)試進(jìn)展以及測(cè)試車輛狀態(tài),保證測(cè)試數(shù)據(jù)的有效性,也是測(cè)試管理面臨的重要挑戰(zhàn)。因此需要用到車隊(duì)管理系統(tǒng),基于此系統(tǒng)可以實(shí)現(xiàn):1、實(shí)時(shí)定位監(jiān)控,車輛位置實(shí)時(shí)展示,包括車輛實(shí)時(shí)運(yùn)動(dòng)狀態(tài)、實(shí)時(shí)車速等;2、實(shí)時(shí)報(bào)警事件消息推送,并在地圖上動(dòng)態(tài)展示報(bào)警的位置;3、車輛數(shù)據(jù)統(tǒng)計(jì),包括里程統(tǒng)計(jì)、告警統(tǒng)計(jì)、狀態(tài)統(tǒng)計(jì)等;4、駕駛員數(shù)據(jù)統(tǒng)計(jì),具體包含駕駛員行車時(shí)間里程統(tǒng)計(jì)、告警統(tǒng)計(jì)、DMS監(jiān)控?cái)?shù)據(jù)統(tǒng)計(jì)等;5、駕駛員DMS監(jiān)測(cè)和報(bào)警,對(duì)于報(bào)警消息實(shí)時(shí)提醒。
通過(guò)數(shù)據(jù)采集系統(tǒng),可將自動(dòng)駕駛車輛各類傳感器類型的數(shù)據(jù)進(jìn)行采集處理,包括常見(jiàn)的CAN、CANFD、 ETH車載以太網(wǎng)數(shù)據(jù)等。用戶可以通過(guò)數(shù)據(jù)中心訪問(wèn)數(shù)據(jù),進(jìn)行后續(xù)數(shù)據(jù)分析、數(shù)據(jù)標(biāo)注、數(shù)據(jù)回注等,從而形成完整的數(shù)據(jù)閉環(huán)。
三、自動(dòng)駕駛汽車到底需要哪些類型的傳感器?
自動(dòng)駕駛汽車是集感知、決策和控制等功能于一體的自主交通工具,其中,感知系統(tǒng)代替人類駕駛?cè)说囊暋⒙?tīng)、觸等功能,融合攝像機(jī)、雷達(dá)等傳感器采集的海量交通環(huán)境數(shù)據(jù),精確識(shí)別各類交通元素,為自動(dòng)駕駛汽車決策系統(tǒng)提供支撐。
1、攝像頭
攝像頭按視頻采集方式分為:數(shù)字?jǐn)z像頭和模擬攝像頭兩大類。
車載上一般使用的是數(shù)字?jǐn)z像頭,它可以將視頻采集設(shè)備產(chǎn)生的模擬視頻信號(hào)轉(zhuǎn)換成數(shù)字信號(hào),進(jìn)而將其儲(chǔ)存在計(jì)算機(jī)里。
模擬攝像頭只能將捕捉到的視頻信號(hào),經(jīng)過(guò)特定的視頻捕捉卡將模擬信號(hào)轉(zhuǎn)換成數(shù)字模式,并加以壓縮后才可以轉(zhuǎn)換到計(jì)算機(jī)上運(yùn)用。
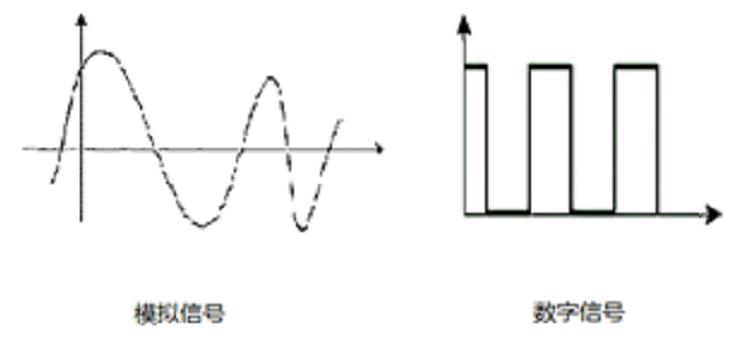
舉個(gè)例子來(lái),我們使用的固定電話就屬于模擬信號(hào),它在通話過(guò)程中容易產(chǎn)生噪音(電流聲或聽(tīng)不清)的情況。而我們的手機(jī)為了保持很好的通話質(zhì)量,就將電話的模擬信號(hào)進(jìn)行了數(shù)字化,手機(jī)之間的通話質(zhì)量就非常清晰,同樣原理使用數(shù)字?jǐn)z像頭能有效減少圖像中的噪點(diǎn)和提升成像效果。
一句話概括:模擬視頻信號(hào)是在一定的時(shí)間范圍內(nèi)可以有無(wú)限多個(gè)不同的取值。而數(shù)字視頻信號(hào)是在模擬信號(hào)的基礎(chǔ)上經(jīng)過(guò)采樣、量化和編碼而形成的。模擬信號(hào)容易產(chǎn)生信號(hào)噪音和干擾,已逐步被數(shù)字信號(hào)取代。

圖片來(lái)源:博世官網(wǎng)
2、雷達(dá)
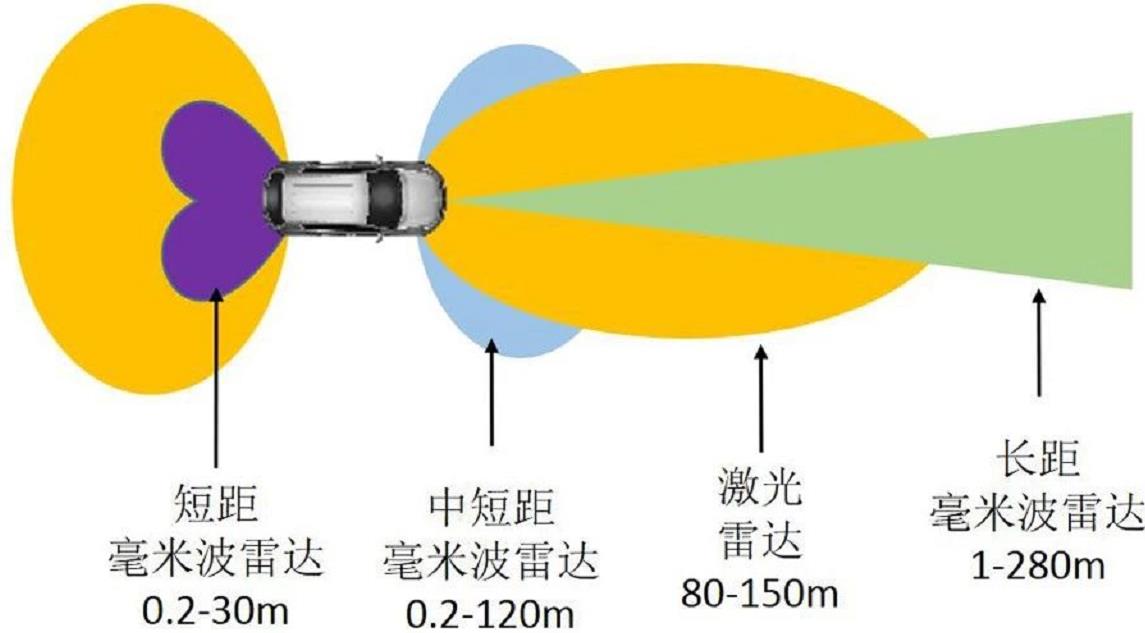
雷達(dá)能夠主動(dòng)探測(cè)周邊環(huán)境,比視覺(jué)傳感器受外界環(huán)境影響更小,是自動(dòng)駕駛汽車的重要傳感器之一。雷達(dá)通過(guò)向目標(biāo)發(fā)射電磁波并接收回波,從而獲取目標(biāo)距離、方位、距離變化率等數(shù)據(jù)。根據(jù)電磁波波段,雷達(dá)可細(xì)分為激光雷達(dá)、毫米波雷達(dá)和超聲波雷達(dá)等3類。
四、自動(dòng)駕駛數(shù)據(jù)標(biāo)注工作內(nèi)容有哪些?
數(shù)據(jù)標(biāo)注指的是,通過(guò)人工或者一定的工具,將少量幀用手工標(biāo)注,且是精細(xì)標(biāo)注。大部分做機(jī)器標(biāo)注,即簡(jiǎn)化標(biāo)注。來(lái)給數(shù)據(jù)集添加真值信息,相當(dāng)于為機(jī)器學(xué)習(xí)系統(tǒng)提供”標(biāo)準(zhǔn)答案”。

人工標(biāo)注人員對(duì)于語(yǔ)義信息更加擅長(zhǎng),但是計(jì)算機(jī)對(duì)于幾何,重建,三角化,跟蹤更加擅長(zhǎng);同時(shí),隨著數(shù)據(jù)規(guī)模的增長(zhǎng),不可能無(wú)限地?cái)U(kuò)大標(biāo)注團(tuán)隊(duì)的規(guī)模。所以,更加精確的數(shù)據(jù)標(biāo)注需要標(biāo)注人員和計(jì)算機(jī)協(xié)作進(jìn)行。
五、自動(dòng)駕駛場(chǎng)景庫(kù)與虛擬仿真測(cè)試
場(chǎng)景是自動(dòng)駕駛測(cè)試系統(tǒng)中相當(dāng)重要的一環(huán),測(cè)試場(chǎng)景的多樣性、覆蓋性、典型性等能夠影響到測(cè)試結(jié)果的準(zhǔn)確性,從而保證自動(dòng)駕駛的安全與質(zhì)量。
場(chǎng)景,指的是行駛場(chǎng)合和駕駛情景的組合,它受行駛環(huán)境的深刻影響,如道路、交通、天氣、光照等因素,共同構(gòu)成整個(gè)場(chǎng)景概念。場(chǎng)景是在一定時(shí)間和空間范圍內(nèi)環(huán)境與駕駛行為的綜合反映,描述了道路、交通設(shè)施、氣象條件、交通參與物等外部狀態(tài)以及自車的駕駛?cè)蝿?wù)和狀態(tài)等信息。從場(chǎng)景架構(gòu)來(lái)看,有不同的行駛場(chǎng)合,像高速公路、鄉(xiāng)村道路、城市工況、機(jī)場(chǎng)、碼頭、封閉園區(qū)等;在該場(chǎng)合下,如何駕駛、駕駛?cè)蝿?wù)、駕駛速度、駕駛模式等一起構(gòu)成了整個(gè)場(chǎng)景的三維架構(gòu)。
自動(dòng)駕駛仿真是借助計(jì)算機(jī)虛擬技術(shù)對(duì)實(shí)際交通系統(tǒng)進(jìn)行某種層次的抽象。通過(guò)把大量自動(dòng)駕駛開(kāi)發(fā)和測(cè)試的成本轉(zhuǎn)化為GPU的物料成本和工程師的知識(shí)經(jīng)驗(yàn)成本,進(jìn)而大大緩解該痛點(diǎn)。
仿真測(cè)試執(zhí)行包含兩個(gè)方面的工作:(1)對(duì)測(cè)試場(chǎng)景庫(kù)的維護(hù)和針對(duì)不同算法或功能合適的測(cè)試場(chǎng)景進(jìn)行運(yùn)行測(cè)試;(2)在測(cè)試完成后,整理并提供清晰的測(cè)試報(bào)告,并提供測(cè)試結(jié)果的統(tǒng)計(jì)數(shù)據(jù),為算法團(tuán)隊(duì)的改進(jìn)提供有效支撐。

▲ 某自動(dòng)駕駛仿真軟件的運(yùn)行可視化界面
在仿真測(cè)試?yán)铮鶕?jù)自動(dòng)駕駛測(cè)試的關(guān)鍵要素,需要建如下的模型,包含最傳統(tǒng)的車輛動(dòng)力學(xué)模型、駕駛?cè)四P汀㈧o態(tài)環(huán)境模型、動(dòng)態(tài)交通模型、環(huán)境感知傳感器模型。建模要關(guān)注兩方面,一個(gè)是計(jì)算效率、一個(gè)是計(jì)算精度,兩個(gè)是彼此制衡。
除了純虛擬環(huán)境的測(cè)試之外,還有多物理系統(tǒng)在環(huán)的仿真測(cè)試,就是說(shuō)要能夠進(jìn)行化學(xué)感知系統(tǒng)、決策規(guī)劃系統(tǒng)、控制執(zhí)行系統(tǒng)的在環(huán)測(cè)試。
基于場(chǎng)景的虛擬仿真測(cè)試,是未來(lái)自動(dòng)駕駛汽車測(cè)試的一個(gè)發(fā)展趨勢(shì),也是必由的途徑。
六、自動(dòng)駕駛場(chǎng)景分類都有哪些?
1、事故場(chǎng)景
事故可以看做是交通安全的一個(gè)濃縮機(jī),能夠體現(xiàn)出實(shí)際交通環(huán)境的高危場(chǎng)景,事故場(chǎng)景研究目前以深度事故研究數(shù)據(jù)為主, 如GIDAS, CIDAS等
2、開(kāi)放道路場(chǎng)景
開(kāi)放道路場(chǎng)景來(lái)源于人們的日常駕駛數(shù)據(jù)以及實(shí)車道路測(cè)試數(shù)據(jù),道路場(chǎng)景能夠很好地體現(xiàn)隨機(jī)性、復(fù)雜性以及區(qū)域特征,可用于分析真實(shí)的交通環(huán)境和駕駛行為特征
3、法規(guī)標(biāo)準(zhǔn)場(chǎng)景
國(guó)內(nèi)外法律法規(guī)涉及的場(chǎng)景, 如GB/ISO/ECE/NHTSA/SAE/Euro-NCAP等機(jī)構(gòu)組織的測(cè)試標(biāo)準(zhǔn),法規(guī)標(biāo)準(zhǔn)場(chǎng)景是自動(dòng)駕駛功能在研發(fā)和定義階段需要滿足的最基本要求
4、功能交互場(chǎng)景:
AD AS系統(tǒng)或自動(dòng)駕駛系統(tǒng)是由橫向、縱向-預(yù)警或控制等多個(gè)子功能構(gòu)成的, 各個(gè)功能之間經(jīng)常存在功能交互區(qū)域, 如ACC和AEB系統(tǒng)都對(duì)車輛的縱向運(yùn)動(dòng)進(jìn)行控制, 兩功能在交互場(chǎng)景區(qū)域作用時(shí)是否存在問(wèn)題需要進(jìn)行驗(yàn)證;功能交互場(chǎng)景能夠測(cè)試智能系統(tǒng)功能邏輯交互上的重疊區(qū)與間隔區(qū),發(fā)現(xiàn)功能交互漏洞與邏輯混亂等問(wèn)題
5、虛擬重構(gòu)場(chǎng)景
真實(shí)駕駛過(guò)程中場(chǎng)景數(shù)目是無(wú)限的,使用參數(shù)隨機(jī)生成算法可以重組場(chǎng)景:虛擬重構(gòu)場(chǎng)景,能夠補(bǔ)充大量來(lái)知工況的測(cè)試場(chǎng)景,打破數(shù)據(jù)采集的局限性。
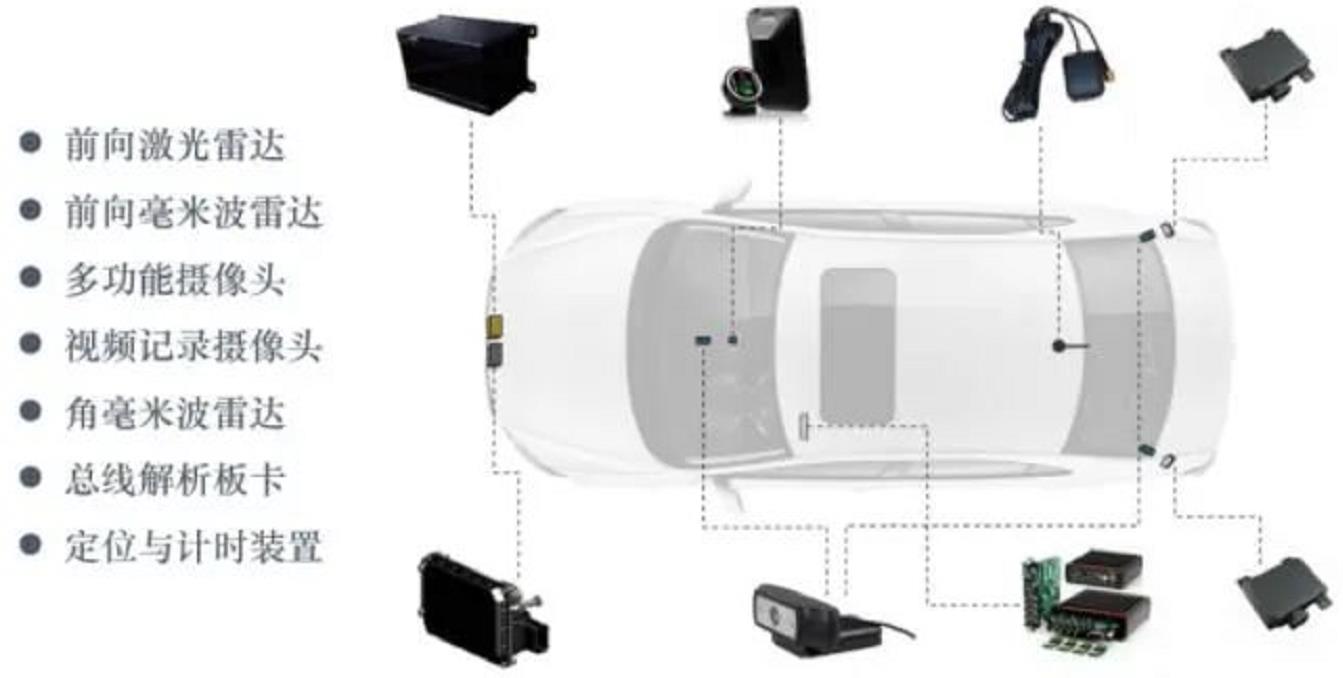
場(chǎng)景采集設(shè)備和安裝布置
七、硬件在環(huán)測(cè)試主要是測(cè)什么?
硬件在環(huán)指的是,利用仿真軟件,實(shí)時(shí)機(jī)和硬件IO接口,對(duì)接到真實(shí)的ECU,在實(shí)時(shí)的環(huán)境進(jìn)行算法測(cè)試。

硬件在環(huán)仿真是自動(dòng)駕駛汽車技術(shù)測(cè)試與驗(yàn)證的重要環(huán)節(jié),具有周期短、成本低及效率高等優(yōu)點(diǎn)。
自動(dòng)駕駛汽車,相對(duì)于傳統(tǒng)車輛,驗(yàn)證成指數(shù)級(jí)增加。都依靠實(shí)車測(cè)試,從時(shí)間上和成本上都不現(xiàn)實(shí),進(jìn)行充分的仿真測(cè)試非常關(guān)鍵。
八、場(chǎng)地測(cè)試主要測(cè)試內(nèi)容包括什么?
場(chǎng)地測(cè)試指的是,ADAS原型車在封閉的試驗(yàn)場(chǎng)或者開(kāi)放的場(chǎng)地進(jìn)行真實(shí)的道路測(cè)試。
自動(dòng)駕駛汽車的場(chǎng)地測(cè)試分有兩種,一種就是在開(kāi)發(fā)的環(huán)境下進(jìn)行真實(shí)的道路測(cè)試,而另一種則是在自動(dòng)駕駛仿真測(cè)試平臺(tái)上進(jìn)行虛擬測(cè)試。而目前幾乎所有車企和自動(dòng)駕駛科技公司,均是以虛擬測(cè)試為主,真實(shí)的道路測(cè)試為輔。
結(jié)合工業(yè)和信息化部、公安部、交通運(yùn)輸部等三部委共同發(fā)布的《智能網(wǎng)聯(lián)汽車道路測(cè)試管理規(guī)范(試行)》,“考試項(xiàng)目”設(shè)置可以包含以下幾個(gè)方面:
1、基本交通管理設(shè)施檢測(cè)與響應(yīng)能力測(cè)試,測(cè)試內(nèi)容應(yīng)包含《GB5768 道路交通標(biāo)志和標(biāo)線》、《GB14887 道路交通信號(hào)燈》、《GB14886道路交通信號(hào)燈設(shè)置與安裝規(guī)范》等標(biāo)準(zhǔn)要求的道路交通設(shè)施種類和安裝規(guī)范等內(nèi)容;
2、前方車道內(nèi)動(dòng)靜態(tài)目標(biāo)(機(jī)動(dòng)車、非機(jī)動(dòng)車、行人、障礙物等)識(shí)別與響應(yīng)能力測(cè)試,測(cè)試內(nèi)容應(yīng)包含感知識(shí)別不同目標(biāo)(非機(jī)動(dòng)車、行人、障礙物)的類型和狀態(tài)、跟隨不同交通參與者(機(jī)動(dòng)車、非機(jī)動(dòng)車、行人)行駛、車速車距控制等內(nèi)容;
3、遵守規(guī)則行車能力測(cè)試,測(cè)試內(nèi)容應(yīng)包含超車、并道、通過(guò)交叉口等內(nèi)容;
4、安全接管與應(yīng)急制動(dòng)能力測(cè)試,測(cè)試內(nèi)容應(yīng)包含靠邊停車與起步、應(yīng)急車道內(nèi)停車、人工接管等內(nèi)容;
5、綜合能力測(cè)試,綜合考察自動(dòng)駕駛汽車對(duì)交通語(yǔ)言認(rèn)知能力、安全文明駕駛能力、復(fù)雜環(huán)境通行能力、多參與對(duì)象協(xié)同行駛能力、網(wǎng)聯(lián)通訊能力等內(nèi)容。
未來(lái)的自動(dòng)駕駛汽車對(duì)安全性要求極其嚴(yán)格,需要通過(guò)靈活的測(cè)試,才能實(shí)現(xiàn)快速創(chuàng)新,同時(shí)保證測(cè)試嚴(yán)格性和效率。
作者:汽車測(cè)試網(wǎng)






