
導讀:自動駕駛行業內一直存在兩個路線之爭,一個是感知方案之爭,一派認為應該走純視覺路線,一派認為應該走視覺與雷達的融合路線;另一個是無人駕駛的實現路徑之爭,一部分認為需要走從L1逐步邁向L4的漸進式路線,另一部分認為應該走直達L4的跨越式路線。本文將分別分析下這兩種路線之爭中不同模式的區別,并提出一些思考。

一、感知方案:純視覺 VS 多傳感器融合
汽車實現自動駕駛首先需要能夠“看見”周圍環境,并對環境內的各種靜態、動態物體有一定的認知,這個過程便是自動駕駛的“感知”,感知需要依賴安裝在車體上的各種傳感器實現,例如攝像頭、激光雷達、毫米波雷達等等。

目前主流的感知方案有兩種,一種是以Waymo為代表的多傳感器融合方案,即同時使用攝像頭和雷達采集信息,分別利用攝像頭和雷達特點,處理各自擅長的數據類型和任務,并將處理結果進行融合得到統一的感知結果;一種是以Tesla為代表的純視覺路線,即僅使用攝像頭作為傳感器進行信息采集,構建純計算機視覺網絡進行感知結果輸出,類似于人眼的感知模式。
1、不同傳感器的能力特性
1.1 激光雷達
主動傳感器,通過發射紅外激光并接收反射光的方式判斷物體距離,視距范圍一般在30~200米,對于特別近的物體很難探測到,空間分辨率較高(角度精度可達0.1度),速度測量精度較低,在黑暗中魯棒性好,但在雨、雪、霧天氣下魯棒性差,能對物體進行大致分類,但無法識別如車道線、交通標識等二維結構。
1.2 毫米波雷達
主動傳感器,與激光雷達工作原理類似,區別是使用無線電波而不是激光,視距范圍比激光雷達更大,尤其是對近距離物體的探測,毫米波雷達可以實現在1米范圍內探測到物體,但毫米波雷達的空間分辨率較低,隨著距離增加,對于小特征的分辨能力降低,不過毫米波雷達利用多普勒頻移可以直接測量速度,同時在黑暗、雨、雪、霧天氣下均能保持良好的魯棒性,此外,毫米波雷達對物體的分類性能較差,同樣也無法識別二維結構。
1.3 攝像頭
被動傳感器,通過被動感光成像來進行識別感知,理論上單攝像頭無法準確識別物體距離,立體攝像頭可以測量距離,但范圍有限,不過實際上特斯拉通過識別算法已經逐步實現了僅通過攝像頭測量物體深度,空間分辨率取決于攝像機的參數,在分辨維度上多于激光雷達和毫米波雷達,可以同時識別到物體顏色等信息,通過物體在圖像上時空信息可以計算速度,同時對物體的分類多樣性更強,且能夠識別車道線等二維結構,但是攝像頭目前在黑暗、雨、雪、霧等惡劣環境條件下的魯棒性很差。
總體來說,激光雷達看得遠看得清,但看不見近處,是個遠視眼,擁有夜視能力,但對惡劣天氣無能為力,同時只能看見三維結構,看不見二維平面結構;毫米波雷達是能看遠也能看近,但越遠越看不清楚,是個近視眼,不僅擁有夜視能力,且擁有惡劣天氣條件下能看見的超能力,不過同樣看不見二維平面結構;而攝像頭僅憑自身能力很難準確判斷距離,但有算法加持,可以發展出這項能力,且攝像頭能看見更多的信息,包括車道線等二維結構、物體分類、顏色等,是個超級眼,但在光線不佳、有雨雪霧等惡劣環境下,能力存在短板。
鑒于以上各傳感器的特性,目前多傳感器融合路線的思路是各取所長,通過激光雷達在各種光照條件下探測距離并完成物體形狀分類,通過毫米波雷達探測附近物體距離并保障自動駕駛感知在惡劣天氣條件下的魯棒性,通過攝像頭識別物體細致分類及車道線、交通標識、信號燈等參與交通必須掌握的信息。
一般是通過“后融合”方式將不同傳感器的感知結果進行融合,即每個傳感器各自獨立處理生成目標數據,當所有傳感器完成目標數據生成后,再由主處理進行融合。
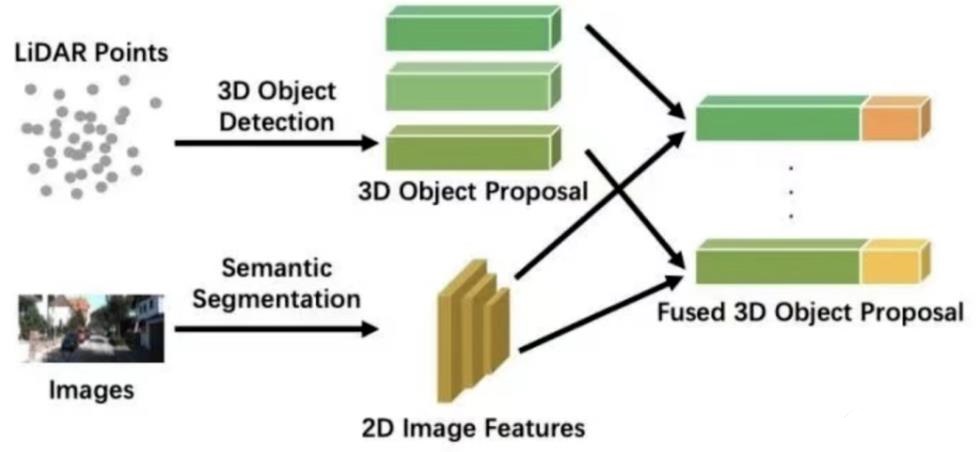
圖片來源:公眾號3D視覺工坊
而純視覺路線僅使用攝像頭作為感知傳感器,其思路是縱深發展,通過攝像頭采集到更多層次的數據信息,并通過持續進步的強大算法,從數據中挖掘到需要的結果。
圖片來源:公眾號電車之家網
2、三個維度來對比下這兩條感知路線
2.1 工程成本
相比于激光雷達和毫米波雷達,攝像頭的成本是最低的,單目相機的價格一般低于100美元,而激光雷達的價格現在大約在5000美元以內,有專家預測未來幾年隨著激光雷達的普及,成本會降至500美元以下,但也仍然高于攝像頭的成本,因此純視覺方案的系統成本是要遠低于多傳感器融合方案的。
2.2 技術復雜度
多傳感器融合方案的復雜度主要體現在“融合”層面,由于不同傳感器特性不同,所采集的數據類型也有很大差異,無論是前融合還是后融合的思路,都需要將不同模態的數據統一映射到同一個專門為融合設計的時空平面,這里面需要考慮融合錯位、信息丟失等問題,同時還需要解決當不同傳感器感知結果不同時,應該選擇信任誰的問題。
而純視覺方案的復雜度主要體現在感知算法層面,由于都是通過攝像頭采集的同模態數據,在數據融合層面困難度比多傳感器方案要小得多,但是由于攝像頭自身能力的局限性,需要設計更為復雜的算法模型,從攝像頭數據中識別到目標信息,例如對距離的計算、在惡劣環境下的識別能力等。
2.3 發展潛力
小鵬汽車副總裁吳新宙曾經表示,視覺的潛力是沒有止境的,它真的是一個寶藏,長期來看,視覺是無所不能的,但是這個能力的增長是有一個過程的。
基于各類傳感器的特性,對于自動駕駛的目標任務,攝像頭的能力具有不可替代的部分,例如對二維結構的感知能力,在行車過程中,對車道線、交通標識等二維結構的識別是必不可少的,相反雷達系統相比攝像頭的能力優勢是有可能通過算法解決掉的,例如是對距離的識別、在夜間及惡劣天氣下的魯棒性問題。
其中視覺方案對距離的識別問題特斯拉目前已經找到解決方案,通過建立BEV鳥瞰坐標系,利用Transformer神經網絡能力可以將地面坡度、曲率等參數內化進訓練網絡,解決了視覺方案僅能基于地面平面假設進行距離計算導致的準確度不夠的問題,隨著算法的持續訓練迭代,純視覺方案識別距離的能力會逐步逼近甚至超越雷達系統。
針對攝像頭夜視能力差的問題,特斯拉提出了直接基于“光子”作為神經網絡輸入的視覺感知處理的方案,“光子”是攝像頭采集數據最原始的形式,傳統的視覺方案中會采用ISP(圖像信號處理)模塊來對攝像機采集到的原始圖像數據進行加工,得到質量更好的圖像,是模仿人眼的成像原理,但這個步驟會導致一部分原始信息丟失,直接采用“光子”數據可以最大限度的保留原始信息,因此在黑夜中,即使是行人微弱的反光,也會被記錄到光子的變化,這使得攝像頭獲得了超越人眼的夜間視距,發展成熟后可以解決純視覺方案的夜間魯棒性問題。
而對于雨雪霧等惡劣天氣下的魯棒性問題,激光雷達也并不能夠解決,毫米波雷達雖然受干擾較小,但由于毫米波雷達自身特性,導致其精度會隨著距離衰減明顯,因此也只能適用于近場問題,相較之下,視覺路線最具解決這個問題的潛力,視覺的基本思路是對人眼的模擬,人類在惡劣天氣下開車時,會根據少量可見的線索對其他汽車或行人的運動軌跡進行預測,盡量規避風險,理論上視覺算法足夠強大時是可以達到人類在惡劣天氣下的感知能力,特斯拉在視覺感知網絡中引入了時空記憶能力,使得感知不僅基于瞬時事件,還能結合之前時刻的事件去處理,這提升了神經網絡的預測能力,再加上對“光子”的感知,使得純視覺方案在惡劣天氣下的感知能力有大幅提升,最新的特斯拉FSD9.0在惡劣天氣下的表現也證實了這一點。
同時,相比多傳感器融合的感知架構,純視覺感知架構更具有美感,融合架構涉及多模態耦合,系統節點多,結構比較冗雜,而視覺架構使用統一結構的數據作為輸入,完成端到端學習,輸出目標任務結果,整體結構非常簡約整潔,這使得純視覺路線的算法效率和系統運行效率都要更勝一籌。
綜合上述幾個維度來看,筆者認為由于大部分公司視覺算法還不夠成熟,且自動駕駛的安全性至關重要,因此短期需要雷達來補余能力,但隨著視覺算法的日漸成熟,多傳感器融合方案可能僅是過渡方案,純視覺方案才是終局。
二、無人駕駛實現路徑:漸進式 VS 跨越式
自動駕駛按照SAE等級劃分為L1-L5,其中L1-L3一般稱為輔助駕駛,駕駛的核心主體仍然是人,而L4-L5稱為無人駕駛,駕駛的核心主體是車,由于L4級以上的無人駕駛從技術到工程層面都有相當大的復雜性,因此行業內自動駕駛公司為實現無人駕駛采用了兩種不同的路線。

一種是以特斯拉、蔚小理等新勢力車企為代表的漸進式路線,采用從L1逐步進階到L5的發展方式,目前基本處于L2+階段,正在向L3邁進中,漸進式路線的核心是要建立從數據到算法的迭代閉環,利用不斷擴大規模的高質量數據持續優化算法,逐步攻克自動駕駛這項復雜任務的各項核心環節,最終實現全無人駕駛。
一種是以Waymo、百度Apollo等科技公司為代表的跨越式路線,這種路線的基本思想是認為低等級自動駕駛的技術框架難以直接遷移至L4級無人駕駛,在資源有限的情況下需要直接聚焦最終形態,因此寄希望于一步到位實現無人駕駛,主要通過大規模車隊獲取路測數據來訓練無人駕駛算法網絡,跨越式路線的核心是要找到適合落地的場景及商業模式,目前已經實現落地的場景主要有RobOTAxi、Robobus等乘用場景以及港口、礦山等商用場景。
1、從商業模式和面臨的主要挑戰對比下這兩條路線
1.1 商業模式
我們知道全面無人駕駛的最終實現是一個長期的戰役,不可能一蹴而就,因此無論是哪種路線,選取何種商業模式來保障落地和造血能力以確保可持續發展是至關重要的。
漸進式路線的商業模式主要是通過自行造車或者與車企合作造車實現快速量產落地獲取商業利潤,會根據用戶現階段的實際需求或適當引導需求逐步落地自動駕駛功能,如高速巡航、自主泊車等,通過OTA軟件迭代升級的模式最終自然而然過渡到完全無人駕駛,這套模式會比較重視落地成本,因此在硬件選型、供應鏈整合、制造水平等方面會投入較大精力。
跨越式路線早期主要是通過資本的注入來供血,但資本是需要回報的,隨著技術的不斷發展,各企業正在逐步探索商業落地之路,以實現自我造血,目前的商業模式主要有兩種,一種是通過Robotaxi、Robobus等滿足交通服務需求,獲取服務價值,一種是切入特殊的場景,如港口、礦山等,這類場景危險系數高,通過自動駕駛替代人工作業,以節約高額人力成本,這套模式對落地成本相對漸進式沒有那么敏感,但要求切入的場景要足夠準確且自動駕駛算法要足夠有效。
相比較而言,目前漸進式路線的商業模式更為清晰,跨越式路線由于可落地的場景有限,商業模式還在持續摸索中。
1.2 主要挑戰
漸進式路線和跨越式路線面臨的挑戰是不同的,前者的主要挑戰是進入門檻相對較低導致競爭激烈,后者的主要挑戰是政策法規及技術成熟速度不及預期導致長期消耗巨大。
采用漸進式發展路線的主要有三類公司,一類是造車新勢力,包括國外的特斯拉,國內的造車新勢力蔚來、理想、小鵬等,一類是傳統主機廠,例如奔馳、上汽、長城等,還有一類是科技公司,包括華為、百度、小米等,各類勢力相繼下場爭奪市場空間,導致競爭非常激烈,而要由漸進式最終實現無人駕駛需要確保占據一定市場規模,因此最終會有部分企業面臨淘汰,目前僅特斯拉處于領先身位,其他家差距并不明顯。
而采用跨越式路線要實現落地需要同時具備技術成熟和配套的政策法規完善兩大條件,其中技術成熟度層面無人駕駛面臨的最大挑戰是應對極端場景(corner case)的處理性能,而僅憑路測獲取的數據要覆蓋全部極端場景可能需要很長周期,再加上有關無人駕駛的政策法規完善時間不可控,因此會導致最終能夠實現全場景無人駕駛落地的時間可能遙遙無期,在這個過程中需要消耗的資金量巨大。
因此,由于漸進式路線商業模式清晰以及面臨的挑戰相對可控,除了少數資金雄厚或者已有場景率先落地的企業堅持只走跨越式路線之外,大部分企業更傾向于選擇漸進式路線,包括一些原本走跨越式路線的企業,也開始兼顧漸進式路線,選擇兩條腿同時走路。
三、小結
無論是感知方案還是實現路徑的選擇,有一個底層思考邏輯是一致的,就是無人駕駛的最終目標是什么,基于目標思考路線。
馬斯克在AI Day上提出要將無人駕駛技術遷移至更廣泛的場景,打造人形機器人,小鵬、小米等企業入局四足機器人,李彥宏在百度AI開發者大會上也提出“汽車機器人”的概念,因此我們有理由認為無人駕駛不僅僅是提高汽車運行效率的工具,其最終目標或許是形成以汽車為載體的通用人工智能技術。
如果是以打造“通用人工智能”為目標,那么數據的豐富性和質量則非常重要,算法為數據服務,算力為算法服務,數據是驅動人工智能技術發展的“核燃料”,誰先掌握數據,誰便占得實現通用人工智能的先機。
從這個角度看的話,視覺路線能夠獲得更底層的數據,可以包含顏色、紋理、語義等多維信息,漸進式路線的特性決定了需要持續擴大量產規模,便也更有可能獲得覆蓋全場景的數據,因此這兩個路線可能是更接近無人駕駛最終目標的選擇。
作者:禾隱記 和君






