
導讀:當前,智能駕駛的開發(fā),是基于功能來展開的,如大家耳熟能詳?shù)淖赃m應(yīng)巡航ACC、交通擁堵輔助TJA、高速領(lǐng)航駕駛輔助NOA等。通常,開發(fā)者對于自家的智能駕駛產(chǎn)品,都會有清晰的功能開發(fā)規(guī)劃。這里的開發(fā)者,包括造車新勢力、傳統(tǒng)主機廠、傳統(tǒng)Tier 1、科技公司、互聯(lián)網(wǎng)巨頭等等,幾乎無一例外。
與此同時,行業(yè)內(nèi)逐漸達成了共識:智能駕駛的測評和體驗,需要基于用戶場景來展開。用戶作為智駕產(chǎn)品的使用者,不可能像開發(fā)者一樣,去深入而詳細地研究各類功能和指標;用戶更關(guān)心的,是一款產(chǎn)品的使用體驗。

1、為便于讀者理解,本文沿用了業(yè)界慣用的“L3”概念。但必須要澄清的是,在實際落地的過程中,考慮到法規(guī)和責任問題,原本按照“L3”的標準設(shè)計的高級別智能駕駛一般都只敢作為L2來使用——嚴格按照SAE及中國工信部的標準看(從責任主體的角度來看),一些車企口中的“L2.5”或“L2.9”仍然是L2;甚至,只要只要車企不敢說“自動駕駛出了事我來擔責”,則哪怕其在市場推廣中命名為“L3.9”,也仍然只是L2。
2、盡管業(yè)界通常認為TJA屬于L2,NOA屬于L3,但嚴格地說,這兩者之間并沒有必然的對應(yīng)關(guān)系,因為TJA、NOA強調(diào)的是“應(yīng)用場景”,說的是“在哪里跑”的問題,自動駕駛等級說的是“出了事誰來擔責”的問題。
很多人并沒有注意到,歐美及韓國所說的L3,又稱為“單車道自動駕駛”,這實際上是“車道保持”,從“單車道”這個場景來說,也就只比通常人們理解的L1強一點吧? 但奔馳說他們家某款車的自動駕駛等級是L3,也沒毛病啊,因為他們敢說“出了事我來擔責”。
NOA在國內(nèi)被翻譯為“領(lǐng)航輔助駕駛”,這個翻譯是值得商榷的。因為,車企一方面希望消費者認為“NOA就是L3”人輔助系統(tǒng)),引誘車主“解放雙手”,另一方面,為了避免陷入責任糾紛,又強調(diào)這只是“輔助駕駛”,這又回到了SAE標準下的L2。
實際上,日本此前在制定關(guān)于L3的法規(guī)時也流露出了這樣一種心理:——既希望本國的制造商們能抓住這個機會,又不想讓他們背負太多壓力;既鼓勵消費者“大膽嘗試”,又害怕他“過分大膽”。
----蘇清濤
當前,智能駕駛的開發(fā),是基于功能來展開的,如大家耳熟能詳?shù)淖赃m應(yīng)巡航ACC、交通擁堵輔助TJA、高速領(lǐng)航駕駛輔助NOA等。通常,開發(fā)者對于自家的智能駕駛產(chǎn)品,都會有清晰的功能開發(fā)規(guī)劃。這里的開發(fā)者,包括造車新勢力、傳統(tǒng)主機廠、傳統(tǒng)Tier 1、科技公司、互聯(lián)網(wǎng)巨頭等等,幾乎無一例外。
與此同時,行業(yè)內(nèi)逐漸達成了共識:智能駕駛的測評和體驗,需要基于用戶場景來展開。用戶作為智駕產(chǎn)品的使用者,不可能像開發(fā)者一樣,去深入而詳細地研究各類功能和指標;用戶更關(guān)心的,是一款產(chǎn)品的使用體驗。
圖1 智能駕駛功能與場景圖示(圖片來源:人工智能在自動駕駛技術(shù)中的應(yīng)用_搜狐汽車_搜狐網(wǎng) (sohu.com))
我們可以這么理解:功能,屬于開發(fā)側(cè)的研究內(nèi)容,形成自己獨特的功能規(guī)劃和功能體系,是開發(fā)者需要重點關(guān)注的主題;場景,屬于用戶側(cè)的研究內(nèi)容,形成系統(tǒng)化和規(guī)范化的用戶場景體系,是測評機構(gòu)和用戶體驗研究需要關(guān)注的主題。
那么,當前智能駕駛的通用功能體系是什么?應(yīng)該如何構(gòu)建用戶場景體系?如何打通功能與場景體系,實現(xiàn)用戶體驗與功能開發(fā)同步?本文將詳細解讀這些內(nèi)容。
一、功能體系
在開發(fā)過程中,由于高速行駛和低速泊車時研究的對象屬性、應(yīng)用的算法尤其是決策算法都完全不同,因此通常會將智能駕駛的功能,分為行車和泊車兩大類功能。
1.1 行車功能
我們匯總了當前主流的行車功能,以及其對應(yīng)的智能化等級、功能實現(xiàn)效果等內(nèi)容,如表1所示。其中功能分級參考SAE最新的標準,詳見圖2。

表1 智能行車功能匯總
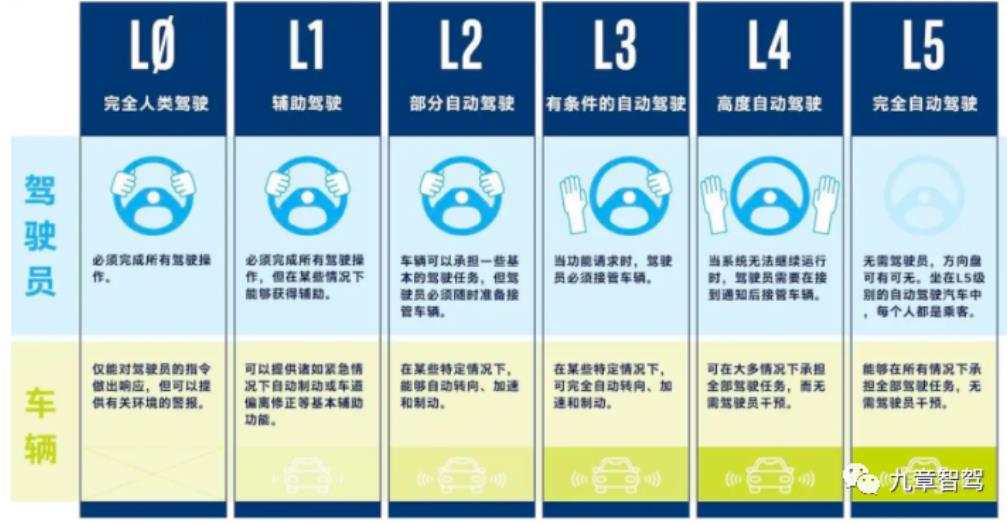
圖2 SAE的智能駕駛分級標準
ACC,全稱Adaptive Cruise Control,即自適應(yīng)巡航控制。作為智能駕駛的基本功能,ACC是大家都耳熟能詳?shù)囊豁椆δ埽惨呀?jīng)發(fā)展地比較成熟。通過對道路環(huán)境和障礙物的感知,自動控制油門和制動系統(tǒng),實現(xiàn)車輛在本車道內(nèi)的自動加減速,以及起步、停車等動作,ACC可以幫助駕駛員解放雙腳,緩解直線行駛的疲勞。
LCC,全稱Lane Centering Control,即車道居中控制。LCC是一項純橫向控制功能,通過對車道線的識別和對轉(zhuǎn)向系統(tǒng)的自動控制,解放駕駛員的雙手,讓車輛自動保持在本車道內(nèi)居中行駛。
ALC,全稱Auto Lane Change,即自動變道輔助。雖然字面名稱叫做“自動變道”,但其實目前主流做法是“指令式變道”,一般是通過轉(zhuǎn)向撥桿,控制車輛的轉(zhuǎn)向系統(tǒng),實現(xiàn)自動變道。ALC可以有效輔助駕駛員實現(xiàn)變道,解放雙手。
TJA,全稱Traffic Jam Assistant,即交通擁堵輔助。TJA可以理解為ACC和LCC功能的疊加,屬于L2級功能。該功能在堵車時,通過自動控制車輛的啟停和加減速,以及微調(diào)行駛方向,實現(xiàn)車輛自動保持在本車道居中跟車,或巡航行駛的功能。
NOA,全稱Navigate On Autopilot,即領(lǐng)航輔助駕駛。基于導航地圖,NOA可以讓車輛自動按導航的路徑實現(xiàn)點到點行駛,長時間解放駕駛員的手和腳。NOA屬于L3級的智能駕駛功能,是低級別智能駕駛功能如ACC、LCC、ALC等的疊加。
按可用區(qū)域的不同,NOA主要分為高速領(lǐng)航駕駛輔助和城區(qū)領(lǐng)航駕駛輔助。受技術(shù)條件的限制,當前已量產(chǎn)的NOA都是高速領(lǐng)航輔助駕駛;造車新勢力如特斯拉和蔚小理等,已經(jīng)在探索城區(qū)道路的領(lǐng)航輔助駕駛功能,并且即將量產(chǎn)。
目前,ACC、LCC、TJA等不涉及變道的智能駕駛功能,基本上已經(jīng)普及,各家?guī)缀醵纪瞥隽讼嚓P(guān)的功能。ALC功能由于涉及到變道,對硬件和算法有更高的要求,目前只有部分玩家實現(xiàn)了量產(chǎn)。NOA功能是目前已經(jīng)量產(chǎn)的最高級別的別智能駕駛行車功能,目前僅有頭部造車新勢力和頭部科技公司實現(xiàn)了高速區(qū)域的領(lǐng)航駕駛輔助,城區(qū)領(lǐng)航輔助駕駛是下一步的趨勢。
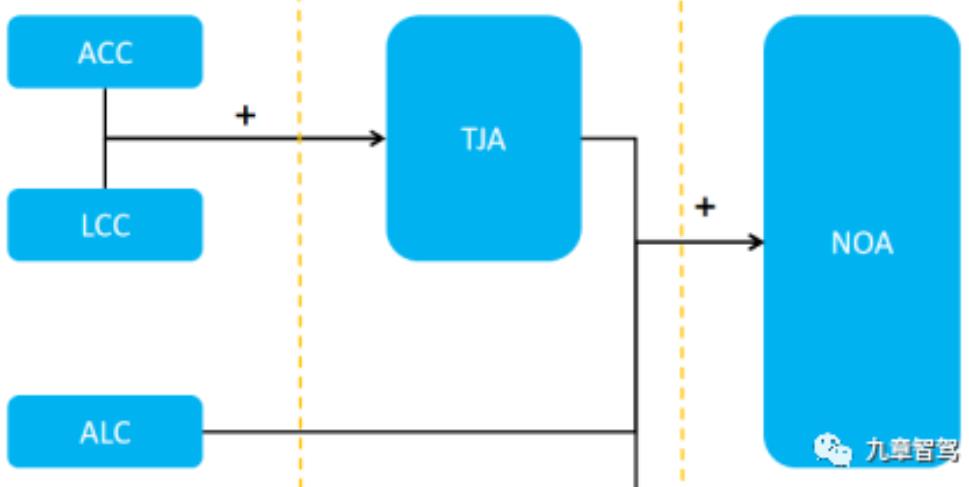
圖3 智能行車功能的關(guān)系圖
1.2 泊車功能
表2匯總了當前主流的泊車功能,以及其對應(yīng)的智能化等級、功能實現(xiàn)效果等。

表2 智能泊車功能匯總
APA,全稱Auto Parking Assist,即自動泊車輔助功能。功能開啟后,APA識別出車輛周圍可用的車位,并且在駕駛員選定車位后,控制車輛的橫縱向運動,實現(xiàn)自動泊入和泊出車位。APA功能需要保持駕駛員在車上,隨時接管。目前APA功能已經(jīng)發(fā)展成熟,日漸成為車輛的標準化配置。
RPA,全稱Remote Parking Assist,即遙控泊車輔助。駕駛員下車后,通過手機APP等遙控方式,控制車輛自動泊入和泊出車位。
SS,全稱Smart Summon,即智能召喚功能。智能召喚功能最早由特斯拉推出,可以讓車主在車外通過手機APP的方式,發(fā)出召喚指令,從而控制車輛自動行駛,到達指定的位置。
HPA,全稱Home-zone Parking Assist,即記憶泊車功能。通過系統(tǒng)自學習,記住車輛在特定區(qū)域(家庭或公司停車場)的特定車位,以及行駛軌跡,HPA可以控制車輛從停車場入口開始,自動完成尋找車位和泊車的所有動作。目前小鵬已經(jīng)實現(xiàn)了量產(chǎn)的HPA功能,由于可用區(qū)域限定在停車場內(nèi),且需要駕駛員在車上隨時接管,因此HPA屬于L3級的智能駕駛。
AVP,全稱Automated Valet Parking,即自主代客泊車。AVP是真正意義上的全自動駕駛,車輛可以自行進入完全陌生的停車場,不需要先行學習,就能完成所有的泊車動作,并且不需要駕駛員在車上。作為L4級別的智能駕駛,目前對軟硬件,尤其是算法和安全性要求很高,目前還沒有量產(chǎn)的產(chǎn)品。
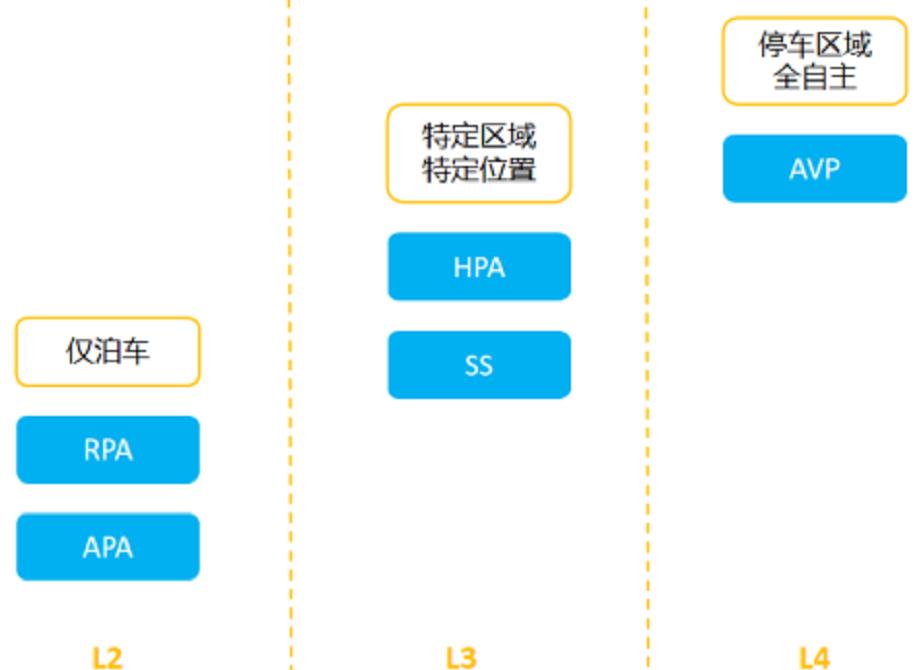
圖4 智能泊車功能關(guān)系圖
1.3 安全功能
除了智能行車和泊車兩大類功能外,智能駕駛還包含基本的主動安全功能,如表3所示。
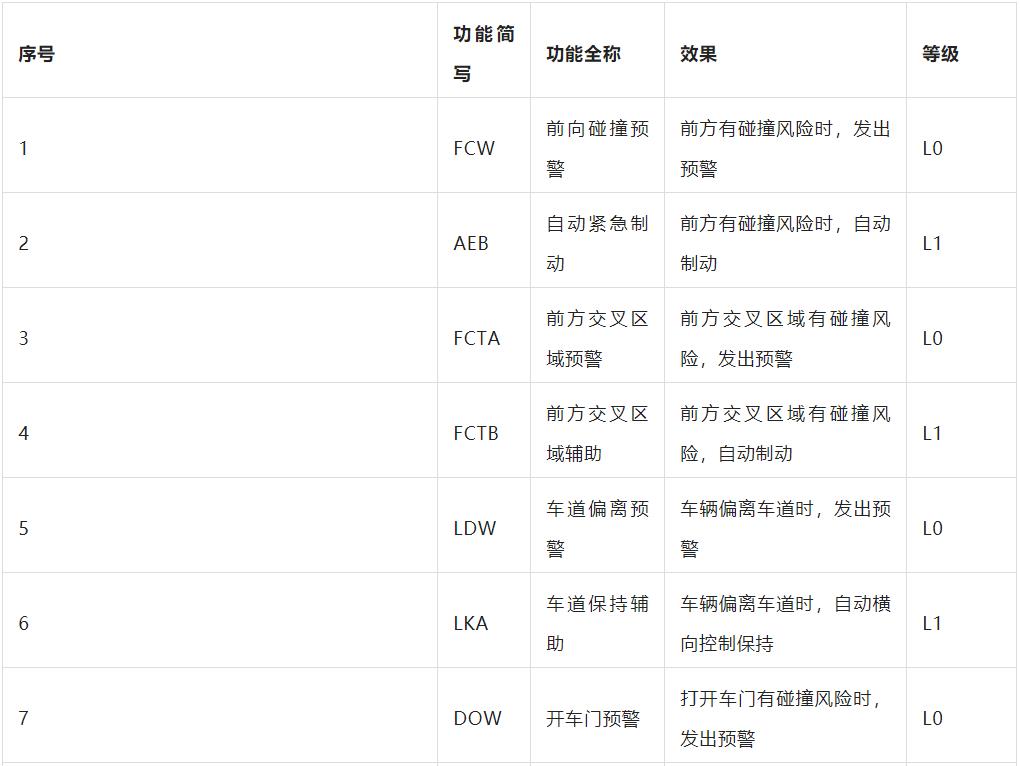

表3 主動安全功能匯總
從表3可以看出,各類主動安全功能與危險源相對自車的位置強相關(guān),而與場景沒有直接依賴關(guān)系,因此不作為本文的研究重點。另外,安全類功能也已經(jīng)發(fā)展地比較成熟,逐漸成為法規(guī)要求的必須項,本文也不再一一展開。
二、場景體系
從完全的用戶體驗角度,常見的出行場景包括高速、城區(qū)和停車場三大區(qū)域,其中高速和城區(qū)都屬于行車場景,而停車場則屬于泊車場景。
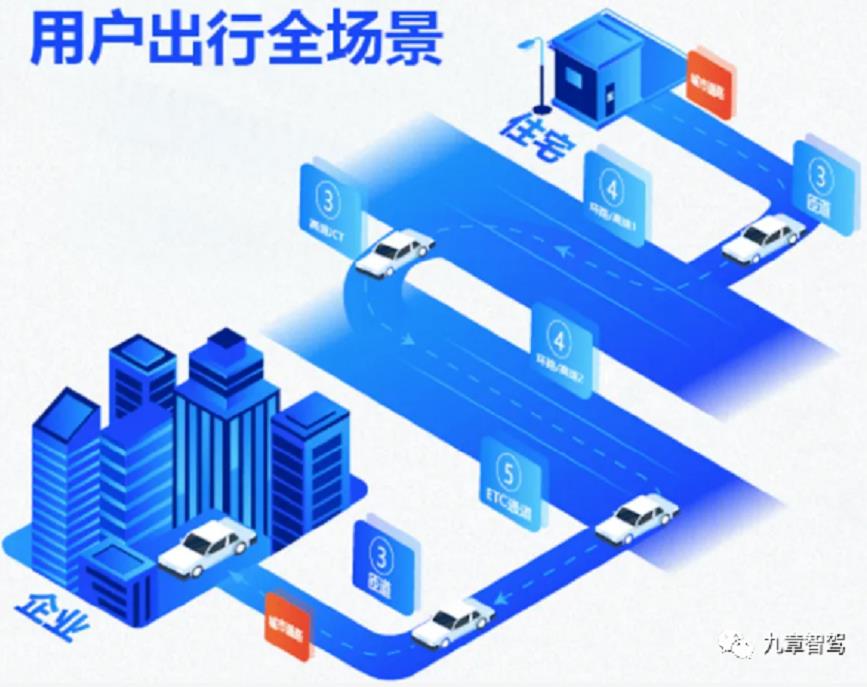
圖5 點到點出行全場景示意圖(圖片來源:阿拉善英雄會自動駕駛“人機大戰(zhàn)” 毫末智行展露冠軍相_搜狐汽車_搜狐網(wǎng) (sohu.com))
2.1行車場景
在道路上行駛的場景稱為行車場景。從智能駕駛的級別和應(yīng)用場景來看,有如下幾類基本的行車場景:
(1)本車道內(nèi)行駛;
(2)變道;
(3)十字路口;
(4)匝道。
在不同場景下,影響用戶體驗的因素各不相同。如本車道內(nèi)行駛時,車輛的加減速響應(yīng)和舒適度會顯著影響駕駛員的體驗;而變道時,變道成功率和變道時機則更為重要;匝道場景下,進出策略和匝道行駛穩(wěn)定性的影響程度更高。
因此,我們需要基于不同的場景,分析在不同場景下,對用戶體驗影響顯著的各項因素,并在開發(fā)過程中,重點考慮這些因素,并轉(zhuǎn)化成智駕系統(tǒng)的性能指標。
2.1.1 本車道內(nèi)行駛
車輛在本車道內(nèi)行駛,且不涉及變道,是最基本的行車場景。根據(jù)在本車道內(nèi)行駛可能遇到的情況,可以再細分為4個子場景:直道行駛;彎道行駛;跟車行駛;以及前方有車切入和切出,即Cut-In/Out。
下面我們具體分析在不同的子場景下,對用戶體驗影響顯著的因素,以及對應(yīng)的智駕性能指標,匯總后的內(nèi)容見表4。
通常情況下,用戶會在直道上開啟智能駕駛功能,因此直道行駛時的智駕功能開啟條件是影響用戶體驗的一項因素。需要有明確、易記、方便的開啟條件,用戶才會樂于使用。
對應(yīng)的性能指標主要是車速,如ACC功能開啟時,需要有合理的初始車速要求和車速范圍限定,過高或過低的車速限制都會影響使用體驗。當前主流的做法是將開啟車速限定在30kph以上,但隨著算法的進步和對自家技術(shù)的自信,蔚小理等新勢力也在逐漸降低車速要求,10kph甚至更低都可能實現(xiàn)。
在任何場景下,舒適性都是影響用戶體驗的直接因素。在直道行駛時,舒適性主要體現(xiàn)在車速增加時的加速度,以及車速降低時的減速度;過大的加減速度會讓用戶感覺到危險,過小的加減速度則顯得系統(tǒng)反應(yīng)遲鈍,引起抱怨。
此外,直道行駛時,車道保持的效果也很重要,平穩(wěn)地保持在本車道內(nèi)行駛,是駕駛員和乘客的基本需求。車道保持效果可以通過車輛居中度體現(xiàn),即車輛距離兩側(cè)車道線的距離。
彎道行駛時,智駕系統(tǒng)的自動過彎能力是首先要考察的因素。可以通過的彎道半徑,直接反映出系統(tǒng)的過彎能力。彎道半徑越小,可以通過的彎道越急,系統(tǒng)的過彎能力越強,那么用戶對系統(tǒng)的信賴度也會更高。
彎道場景與直道場景有著共同的影響因素:舒適性和車道保持效果。
彎道行駛時的舒適性,主要通過車輛的橫向狀態(tài)參數(shù)體現(xiàn),如橫擺角、側(cè)傾角及側(cè)向加速度等。當然,用戶的主觀感受也是舒適性的重要指標。
跟車場景下,由于涉及到外部車輛,因此安全感非常重要,此時的跟車時距與安全感緊密相關(guān)。適當?shù)母嚂r距,可以讓駕駛員感覺不到碰撞風險,沒有壓抑感,同時也能避免被頻繁加塞。
另外,舒適性和響應(yīng)情況也是需要考慮的因素。前車車速發(fā)生變化時,自車的響應(yīng)時間、加減速度等,都會影響功能使用體驗。
Cut-In/Out場景是本車道內(nèi)行駛的一種緊急場景,因此智駕系統(tǒng)的識別能力尤為重要。能夠提前識別的距離越遠、時機越早,就越能避免危險,保證安全。
另外,與跟車場景一樣,Cut-In/Out場景下的舒適性和響應(yīng)度也直接影響用戶體驗。


表4 本車道行駛場景的用戶體驗影響因素
除了直道、彎道、跟車、Cut-In/Out這4種基本和典型的子場景外,還有其他場景也屬于本車道內(nèi)行駛的情況,包括一些特殊場景。如車道線合并、分叉、消失,車道內(nèi)有障礙物,施工引導變道等等,也是我們需要考慮的。
另外,系統(tǒng)對交通標志和周圍障礙物如行人等的識別能力,也影響智駕系統(tǒng)的性能,從而影響到用戶體驗。
2.1.2 變道
變道是出行場景中,出現(xiàn)頻率極高的場景。在超車、地形變化、車道封閉等狀況時,都會發(fā)生變道動作。
變道能力體現(xiàn)了智駕系統(tǒng)在變道場景下的邊界能力。變道成功率、變道的車速范圍要求、道路曲率范圍、車道寬度范圍以及極限的變道距離等,都是系統(tǒng)變道能力的指標。其中變道成功率是一個統(tǒng)計數(shù)據(jù),需要基于大量的測試結(jié)果,才能得出相對準確的結(jié)論。
目前量產(chǎn)的智駕功能,對于變道時的車速范圍,都有一定要求,常見如最低45kph、最低60kph等。隨著算法能力的提升,對于車速和道路曲率、寬度等條件的要求,正在逐漸放寬。
危險預判能力是用戶安全感和信賴感的保證,只有系統(tǒng)能夠及時預判出風險并提示用戶,用戶才會對系統(tǒng)逐漸產(chǎn)生信任和安全感。試想,如果用戶自己能夠發(fā)現(xiàn)相鄰車道有車輛快速接近,不能變道,但系統(tǒng)卻沒有識別出來,用戶怎么可能信任這套智駕系統(tǒng)呢?
變道時的危險預判能力主要體現(xiàn)在系統(tǒng)對危險源的識別率,以及危險源的判定條件如距離、相對速度等方面。識別率越高,提前識別的距離越遠,則危險預判能力越強。
合規(guī)、合法也是不可或缺的因素,尤其在變道場景時,更容易出現(xiàn)違規(guī)操作。因此,能否準確識別虛、實線,能否正確地按車道線變道,是考量變道合規(guī)性的
重要因素。
舒適性是永恒的主題。在變道場景中,系統(tǒng)的決策時間和完成時間會影響用戶對系統(tǒng)能力的評價,而變道時的車速變化策略、加減速度、橫擺角速度、側(cè)向加速度等車輛狀態(tài)參數(shù),則直接影響用戶的舒適體驗。
可控感是人機共駕的重要因素,無論任何功能,只要不是完全的自動駕駛,就要保證駕駛員對車輛的可控感。在變道場景中,駕駛員如轉(zhuǎn)動方向盤或反向撥轉(zhuǎn)向燈,車輛對駕駛員操作的響應(yīng)情況,是評估可控感的主要指標。

表5 變道場景的用戶體驗的影響因素
2.1.3 十字路口
十字路口是城區(qū)行駛的常見場景,也是較為復雜的場景。車道線、斑馬線、箭頭、引導線等多種交通靜態(tài)要素,以及車輛、行人、兩輪車、動物等多種交通動態(tài)參與者,再加上實時變化的紅綠燈,共同組成了十字路口這一經(jīng)典的城區(qū)場景。
車輛在十字路口的行為主要有停車、直行、轉(zhuǎn)彎、掉頭等,因此我們需要考慮的用戶體驗影響因素,可以部分借鑒前文提到的直行、彎道和跟車行駛場景的各項因素。此外,車輛識別紅綠燈,以及自動按紅綠燈行駛的能力,是在十字路口場景需要重點考慮的因素。

圖6 典型十字路口(圖片來源:關(guān)于荊州十字路口交通的建議 - e線民生 - 荊州新聞網(wǎng) (jznews.com.cn))
2.1.4 匝道
匝道是高速公路和城市立交所特有的場景。作為不同主干道之間的連接部分,在匝道場景下的體驗,是評估智駕系統(tǒng)的重要內(nèi)容。
匝道場景具體可以細分為匝道內(nèi)行駛、進入匝道和駛出匝道等3個子場景。
由于目前匝道基本上都是彎道,因此在匝道行駛的用戶體驗影響因素和指標,可以參考前文彎道場景的內(nèi)容。
而在進入匝道和駛出匝道的場景中,重點需要考慮進、出匝道的策略和車速變化。例如,進入匝道時,需要提前向右側(cè)車道變道,并提前減速,那么提前變道和減速的時機就很重要;駛出匝道時,車速如何變化,是否能否自動加速到道路限速等,都是影響使用體驗的因素。
此外,進入匝道和駛出匝道進入主路的成功率,也是評價系統(tǒng)性能和用戶體驗的重要指標。
2.2 泊車場景
泊車場景主要發(fā)生在停車場,因此與行車場景相比,較為簡單。
按泊車的完整流程,泊車場景包括停車場內(nèi)自動行駛、搜索車位、泊入和泊出車位等。
2.2.1 停車場內(nèi)行駛
當前的停車場類型主要可以分為以下4種:地下停車庫、停車樓、露天停車場和路邊臨時停車位。不同類型停車場的基礎(chǔ)設(shè)施、路面狀況、光照條件等都各不相同,因此車輛在不同停車場內(nèi)行駛的表現(xiàn)也會有差異。
總體來說,在停車場內(nèi)行駛,主要考察車輛的軌跡規(guī)劃能力和感知定位能力,以及對障礙物的識別能力。
表6匯總了停車場內(nèi)常見的靜態(tài)特征和動態(tài)障礙物,智駕系統(tǒng)需要準確識別這些特征和障礙,才能做到安全高效地在停車場內(nèi)行駛。
在停車場內(nèi)自動行駛與低速的行車場景類似,用戶體驗的影響因素和指標項可以參考低速的行車場景。

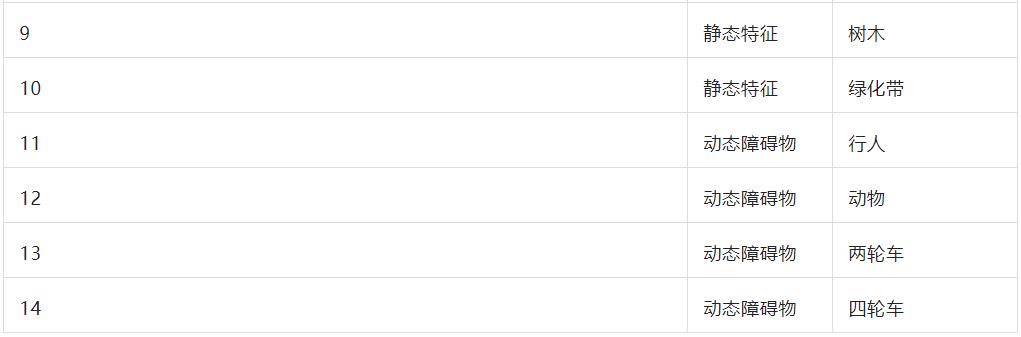
表6 停車場內(nèi)常見的動、靜態(tài)物體
2.2.2 搜索車位
搜索車位的用戶體驗,主要考察車輛對車位的識別能力。車位識別的準確率越高,說明車位識別能力越強,用戶的體驗也會越好。
停車位的類型多種多樣,按車位線情況可分為標線車位與非標線車位,按車位方向可分為垂直車位、水平車位與斜列車位等。表7匯總了常見的車位分類依據(jù)和具體類型。
需要說明的是,車位搜索能力也應(yīng)該基于多次測試的統(tǒng)計數(shù)據(jù)來評價,樣本量太小,沒有普遍意義。

表7 常見車位分類依據(jù)和具體類型
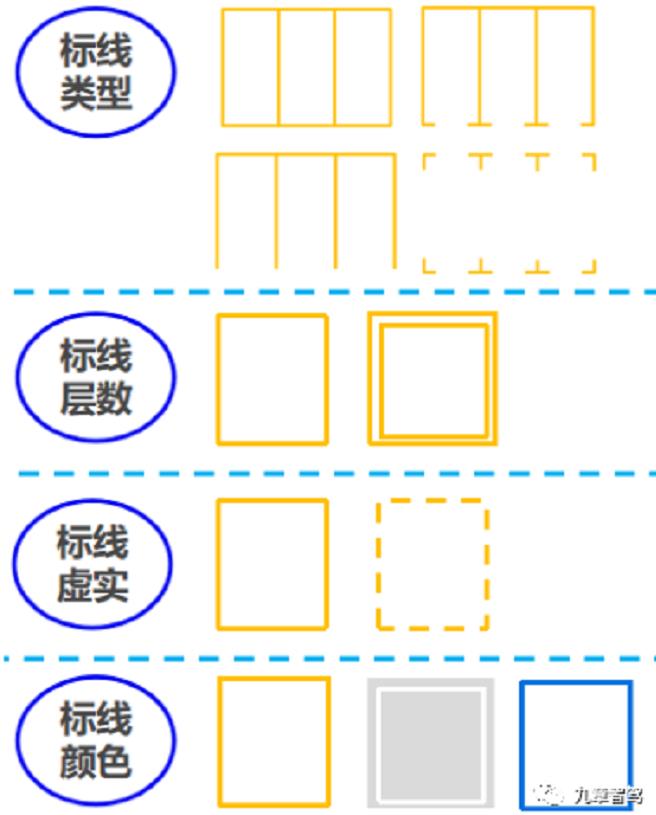
圖7 車位標線示意圖
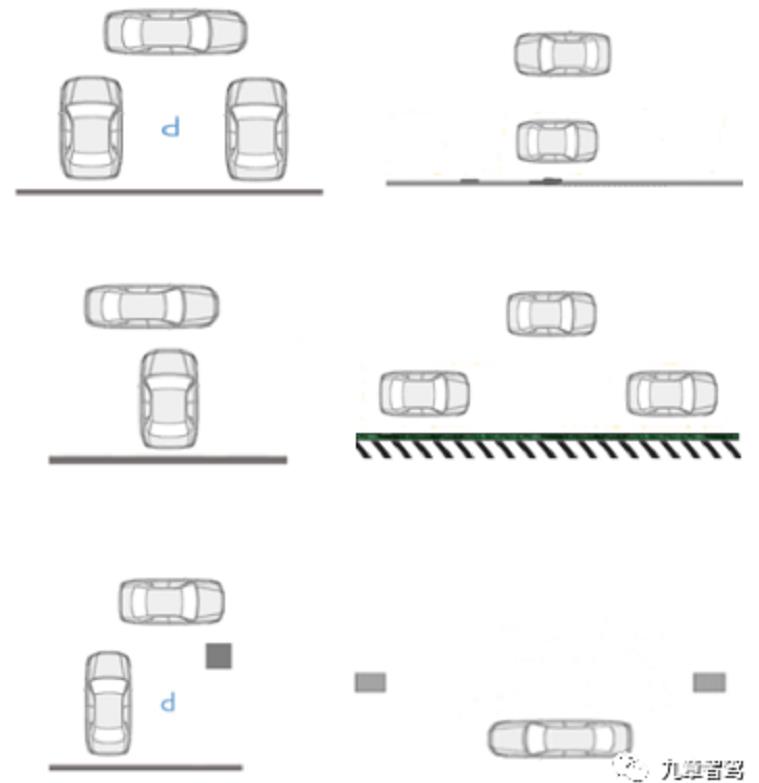
圖8 部分空間車位示意圖
2.2.3 泊入和泊出車位
泊入車位是泊車過程的最后一步,也是智能泊車的最初應(yīng)用場景。
當搜索到適合的車位時,智駕系統(tǒng)便控制車輛自動泊入車位,期間的橫縱向控制和擋位切換等操作,都由系統(tǒng)自動完成。
泊入能力是影響泊入體驗的首要因素,體現(xiàn)了系統(tǒng)的泊車能力。泊入能力的指標包括成功率、可泊入的車位尺寸范圍、車速范圍等,需要綜合考慮車輛狀態(tài)參數(shù)和車位參數(shù)等。
舒適性同樣是重要的影響因素。對于駕駛員在車上的智能泊車系統(tǒng),舒適性直接影響了用戶的體驗。車輛在泊車過程中的加減速度和系統(tǒng)完成泊車的時間等指標,可以體現(xiàn)舒適性。
泊車的規(guī)范性是另一項影響因素,停放規(guī)范整齊的車輛,會增加用戶的好感和信任。是否停放端正、位置是否居中、與車位線或相鄰車輛的距離如何,都反映了系統(tǒng)泊車的規(guī)范性。
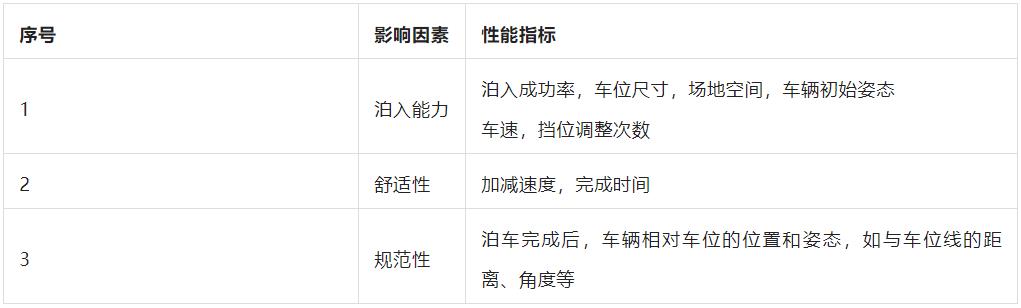
表8 泊入車位的用戶體驗影響因素
泊出車位是泊入車位的相反過程,其影響因素與泊入場景基本一致。
三、功能與場景的關(guān)聯(lián)
前文我們詳細解讀了智能駕駛的功能體系和場景體系,而這兩種體系也分別代表了開發(fā)側(cè)和用戶側(cè)。因此,分析不同功能與場景之間的關(guān)聯(lián),找出其內(nèi)在聯(lián)系,是打通開發(fā)側(cè)與用戶側(cè)的重要途徑。
3.1行車功能與場景
根據(jù)前文對智能駕駛功能體系的解讀,行車功能主要有L1級別的ACC、LCC、ALC,L2級別的TJA,L3級別的NOA,其中NOA又分為高速公路區(qū)域的NOA和城區(qū)的NOA。
從功能描述中不難看出,ACC的主要作用是自動控制車輛縱向行駛,LCC主要用于保持車輛在車道內(nèi)居中,因此ACC和LCC主要應(yīng)用于本車道內(nèi)行駛的場景。在這2項功能開發(fā)過程中,需要重點考察在前文提到的在本車道內(nèi)行駛場景中,涉及的性能指標項。其中ACC需要考慮所有的指標,而LCC則重點考慮車道保持效果和舒適性。
ALC的作用就是變道,因此應(yīng)用于變道場景。在開發(fā)ALC的過程中,開發(fā)者要重點關(guān)注的是變道場景下的用戶體驗影響因素,如變道能力、舒適性、合規(guī)性等,及其對應(yīng)的性能指標。
TJA功能是ACC+LCC+ALC的疊加效果,因此需要包括這3種功能所包含的場景,即本車道內(nèi)行駛+變道場景。相應(yīng)的,需要考慮的用戶體驗影響因素和性能指標,也應(yīng)該是這些場景的內(nèi)容。
NOA功能分為高速NOA和城區(qū)NOA。高速NOA對應(yīng)的場景除了TJA功能涉及的場景外,還需要加入匝道場景;城區(qū)NOA場景則是TJA場景加上十字路口。可以看出,NOA涉及了最多、最全面的場景,開發(fā)過程種需要考慮大量的用戶體驗和性能指標項,因此想要做好NOA功能,是具有一定難度的。
當然,NOA功能涉及的場景很復雜,我們在此只列舉了典型的基本場景,還有其他一些場景也是開發(fā)者需要不斷發(fā)掘和補充的,如橋梁、隧道、非結(jié)構(gòu)化道路、學校等等,都有其獨有的特點。基于基本場景,不斷擴展,豐富場景庫,是智駕開發(fā)的一項長期而有意義的工作,對于功能開發(fā)和提升用戶體驗,非常有幫助。
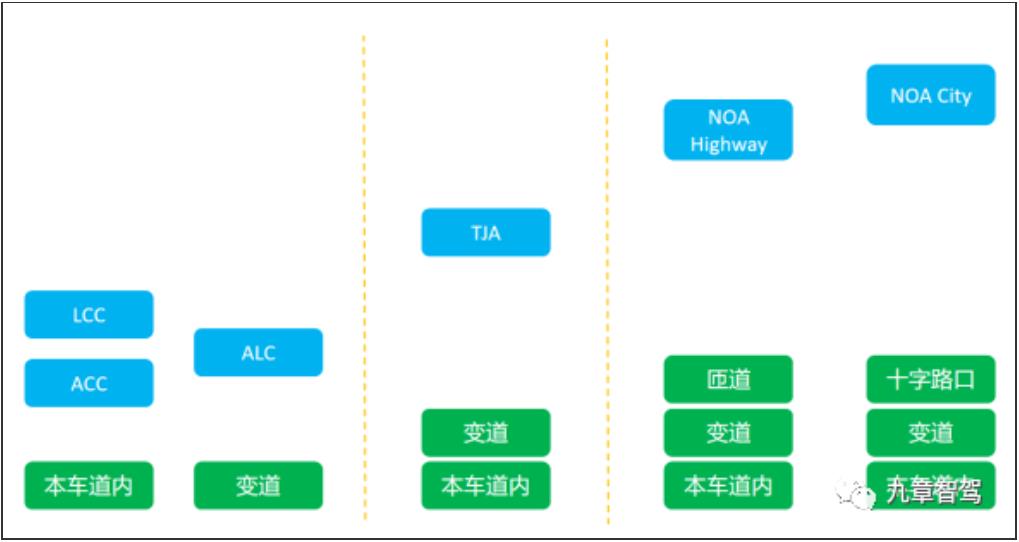
圖9 行車功能與場景的關(guān)系圖
3.2泊車功能與場景
泊車功能包括L2級別的APA、RPA,L3級別的SS、HPA,L4級別的AVP。
APA和RPA的作用區(qū)域是在停車位附近,將車自動泊入泊出,不同之處在于APA是駕駛員在車上監(jiān)控并隨時接管,RPA是駕駛員在車外監(jiān)控并通過遙控裝置隨時接管。
因此,APA和RPA的應(yīng)用場景是泊入和泊出車位,在功能開發(fā)的同時,需要全面考慮泊車能力、舒適性和規(guī)范性等影響用戶體驗的因素。
SS和HPA的作用區(qū)域是停車場內(nèi),包括停車位和停車場內(nèi)的道路。SS負責將車從停車位召喚到指定位置,HPA則負責將車從停車場入口停到特定車位上。
可以看出,SS的應(yīng)用場景是泊出車位,加停車場內(nèi)行駛;HPA的應(yīng)用場景是停車場內(nèi)行駛,加搜索車位,再加泊入車位。開發(fā)者需要重點關(guān)注車輛在停車場內(nèi)低速行駛的體驗,以及搜索車位的能力,這對車輛的融合感知和定位能力有很高的要求。
AVP作為智能泊車的終極解決方案,屬于L4功能,是所有智能泊車功能的集大成者,其作用區(qū)域覆蓋了從車主下車,到車輛泊入的全過程,以及相反的召喚全過程。AVP的應(yīng)用場景是前文提到的所有泊車場景的疊加,包括停車場內(nèi)行駛、搜索車位、泊入和泊出車位。
此處我們忽略了車輛從車主下車點到停車場的這段距離,由于這段場景在停車場外,并且存在不確定性,在本文中就不展開了。
AVP功能需要全面關(guān)注泊車全部場景下的用戶體驗和性能指標。另外,由于AVP功能開啟時,用戶已經(jīng)離開車輛,因此高安全性和魯棒性,也是至關(guān)重要的,需要有足夠的安全冗余設(shè)計。
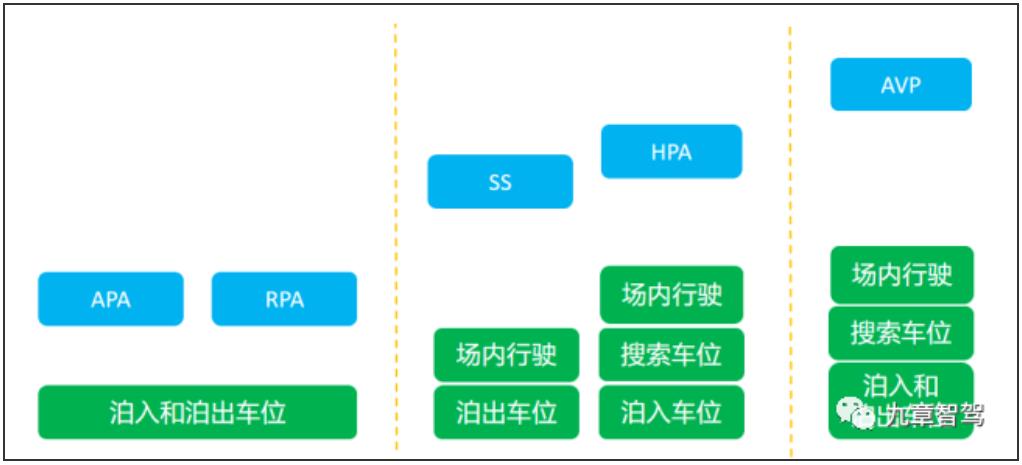
圖10 泊車功能與場景的關(guān)系圖
四、結(jié)語
本文我們詳細解讀了當前智能駕駛的功能體系和場景體系,并分析了兩者之間的聯(lián)系,建立了功能體系與場景體系的關(guān)聯(lián)架構(gòu)。
通過全面考慮功能與場景的關(guān)聯(lián),基于功能規(guī)劃和應(yīng)用場景,綜合制定智能駕駛的性能指標,有利于在開發(fā)早期就打通開發(fā)側(cè)和用戶側(cè)的壁壘,將用戶體驗全程納入開發(fā)過程,實現(xiàn)同步開發(fā)。
當然,功能是不斷迭代的,場景是不斷完善的,我們在智駕開發(fā)過程中,需要基于這些基本功能和基本場景,持續(xù)升級拓展,真正地做到產(chǎn)品需求源于用戶,智駕功能服務(wù)于用戶,打造出高滿意度的智能駕駛解決方案。
來源:九章智駕 ,作者Engineer X






