
導讀:離自動駕駛卡車規模化落地,還有多遠?在這個問題上,嬴徹科技已經交出了其成績單。
9月1日,在以“實踐出真知”為主題的首屆嬴徹科技日上,嬴徹科技透露,經過與中國卡車主機廠近三年的聯合開發,搭載嬴徹軒轅自動駕駛系統的智能重卡已于2021年底成功量產。目前,搭載該系統的L3級自動駕駛卡車已有2個車型、200臺車下線。截止2022年8月底,在30余條常態化運營線路上,智能重卡的自動駕駛商業運營里程已突破600萬公里;L4全無人駕駛重卡也已完成國內最復雜24公里封閉道路測試。

圖片來源:嬴徹科技
一個個數據,都展現了嬴徹科技的不俗實力。而嬴徹科技也以推動行業共享共創自動駕駛車輛量產方法論為目的,將其三年實現量產背后的方法論體系、技術創新以及產業融合實踐進行整理形成《自動駕駛卡車量產白皮書》,并在嬴徹科技日上正式發布,同期啟動 “嬴徹-清華AIR杯“自動駕駛技術挑戰大賽,邀請全球自動駕駛愛好者一起解決真實世界中的技術難題,在量產條件約束下挑戰算法極限。
一、從1.0走向3.0,從量產走向無人技術路線
“自動駕駛行業進入新階段,技術重點從算法軟件探索邁進前裝量產,這也讓正向設計、前裝量產自動駕駛整車的技術、體系與經驗成為行業的稀缺品。”嬴徹科技創始人兼CEO馬喆人在會上表示:“嬴徹科技自成立之初即秉持全棧自研、量產導向、產業融合的技術策略。嬴徹科技自成立之初即秉持全棧自研、量產導向、產業融合的技術策略。通過舉辦科技日,與產業伙伴分享實踐,共建體系、突破技術,共同發展。”
目前,伴隨著嬴徹軒轅系統1.0的量產落地,嬴徹全棧自研技術邁入2.0階段,并在核心技術上取得重大突破。

圖片來源:嬴徹科技
在算法進化方面,嬴徹開發了多模多視角Transformer的前融合感知框架、緊耦合的規劃與控制一體化架構、以及多時間尺度的節油體系三項突破性技術。
其中,多模多視角Transformer的前融合感知框架可從透視視圖切換至BEV視角,并將不同數據源的特征圖充分融合,然后利用長短期記憶(LSTM)的時序融合網絡獲得視頻流的感知結果。可有效應對感知遠距離的小物體、異型車等干線物流重卡的獨特挑戰。同時,通過模型輕量化將計算量降低50%,運用NPU加速傳統CV算法(用于預處理),提速達100倍。
規劃和控制的難點在于要同時滿足安全、精準、舒適、耐久、經濟5大商業運營要求,這不可避免會帶來精準建模與一車一調、精準控制與耐久經濟、規劃控制分層與融合之間的矛盾。而嬴徹創造性地開發了規控一體的PNC架構,實現了預測、決策、規劃和控制的緊耦合,在苛刻的運營要求中找到最優解。
節油算法上,嬴徹從亞秒級、秒級、分鐘級、小時級對油耗進行全面優化。特別在小時級的車云協同全局速度規劃算法上取得突破,在云端建立以關鍵途徑點為節點的GNN(Graph Neural Network),利用歷史經驗數據和即時交通數據,實現最優的速度推薦。在實際運營中比金牌司機平均節油2-5%,逼近7%的節油上限。

圖片來源:嬴徹科技
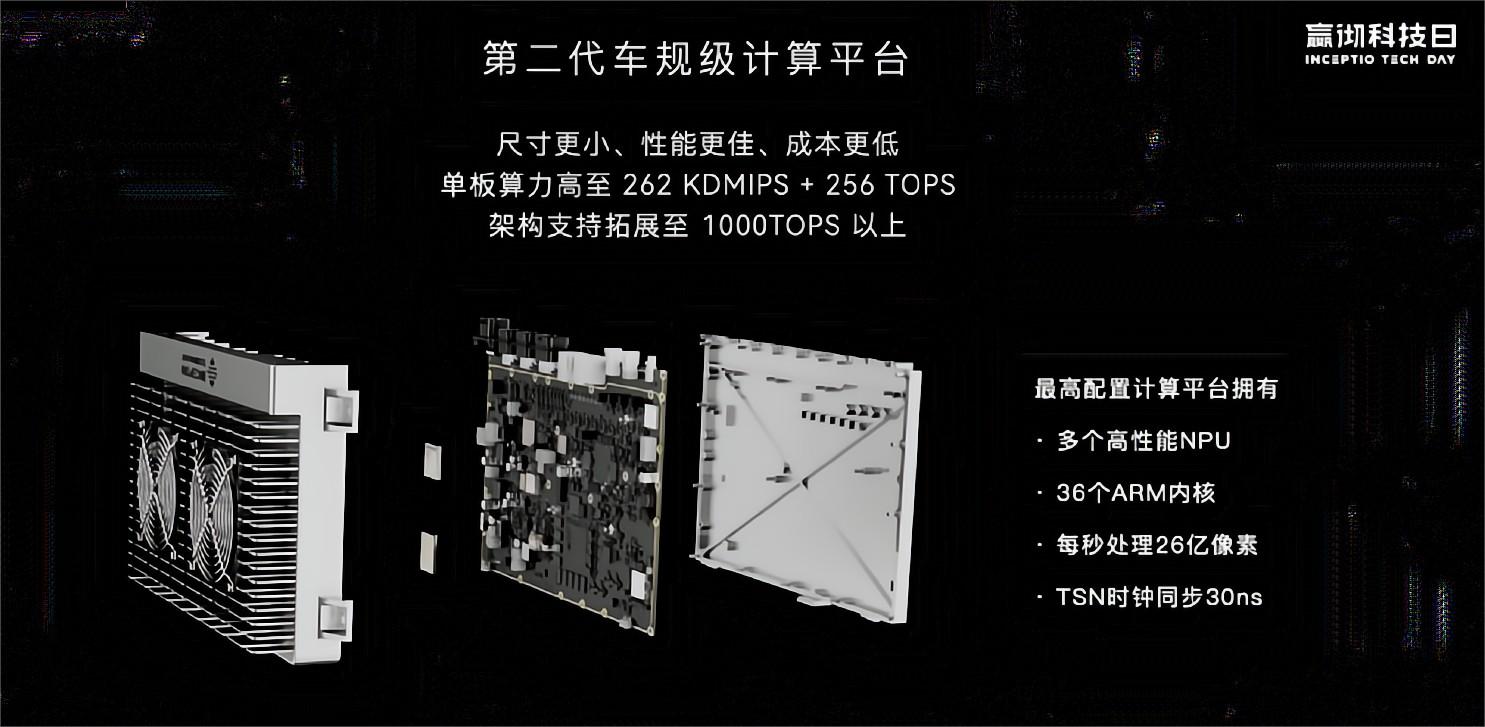
核心硬件迭代方面,嬴徹自研的計算平臺已進入第二代開發,尺寸更小、性能更佳、成本更低。單板算力高至256 TOPS,架構支持拓展至1000TOPS以上。平臺基于TSN協議,可實現30ns的時間同步精度,業界領先。
圖片來源:嬴徹科技
數據閉環層面,采用創新性的增強影子模式,將數據資產轉化為技術優勢。據了解,相比傳統影子模式,增強影子模式可提供面向L4級技術迭代所需的長時間行為(如油耗相關行為等)的采集和評估能力,實現實時A/B Test高效算法迭代,降低數據采集成本同時提升數據有效性和精準度。
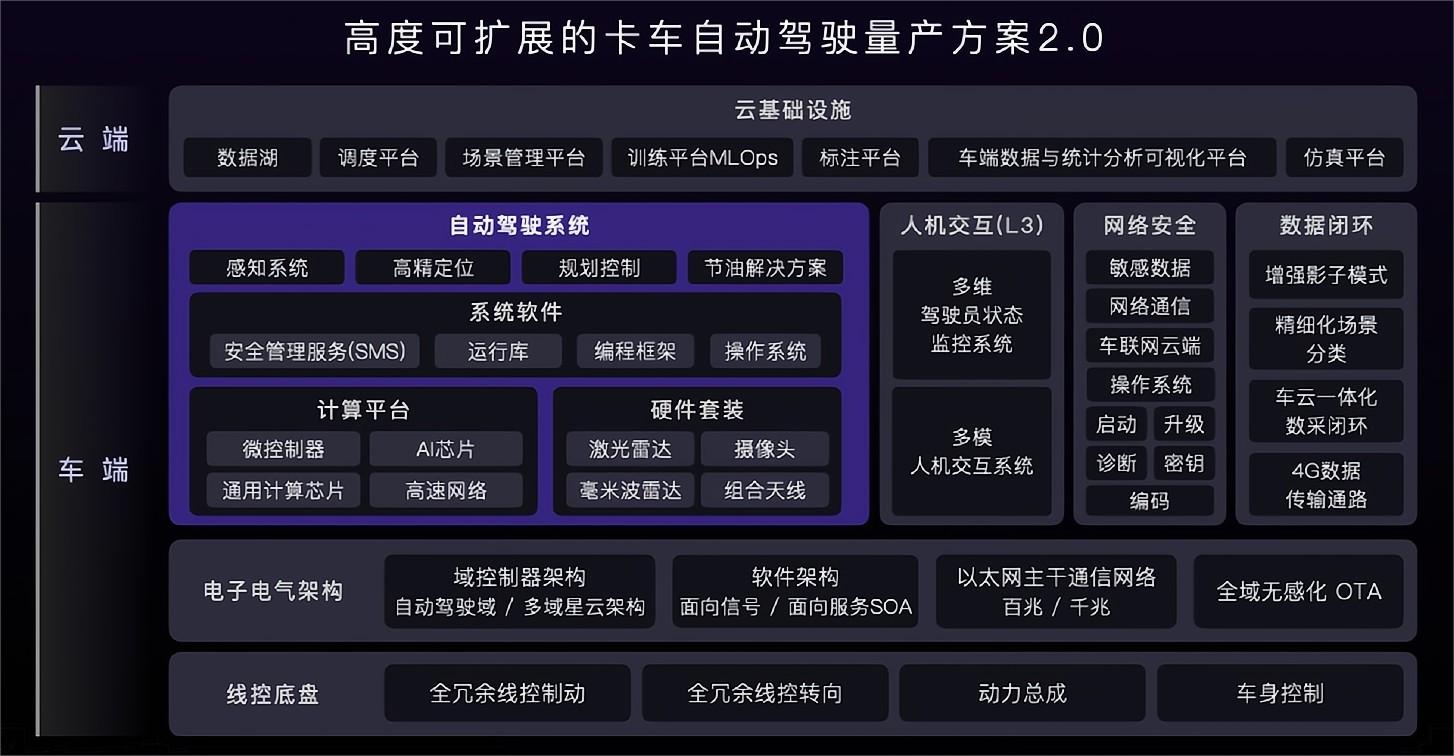
基于以上核心技術突破,軒轅自動駕駛系統2.0開始規劃量產。
圖片來源:嬴徹科技
與此同時,軒轅自動駕駛系統3.0也已在預研中。
對于全無人駕駛技術,嬴徹科技認為當前的自動駕駛技術架構很有可能遭遇瓶頸,3.0系統提出了一種全新的自動駕駛架構的構想,該架構可以拆除自動駕駛系統各子模塊之間人為設計的邊界,替代為端到端的深度神經網絡,并通過結合深度強化學習(DRL)和神經輻射場(NeRF)技術的NeDFS 終極自動駕駛仿真器,訓練端到端模型,實現自動駕駛能力的自我演進,最終走向無人。
二、看了《白皮書》,就能實現3年量產智卡夢嗎?
嬴徹科技發布的《自動駕駛卡車量產白皮書》,深度分享了自動駕駛卡車量產開發的方法論體系和技術創新,其中包括量產8大原則:

圖片來源:嬴徹科技
在需求定義方面,提出一套針對自動駕駛卡車使用場景的系統性正向功能定義方法。融合了功能安全和信息安全的標準與規范,并配套5大類完整指標體系和測試方案。
在系統開發方面,完整覆蓋自動駕駛卡車7大核心系統的量產開發方法論與全棧核心技術。詳細介紹了在卡車物理特性、苛刻安全要求、量產一致性、成本壓力、運輸時效和安全員特點等多重挑戰下的前沿技術創新和極致工程優化。

圖片來源:嬴徹科技
在開發流程方面,以“正向開發、兼顧敏捷”為原則,建立自動駕駛量產研發流程體系。并將汽車行業的V模型開發流程與軟件行業的敏捷開發模式進行了創新性融合,建立了業內最完整的自動駕駛卡車量產測試驗證體系。
與此同時,對如何評估一款自動駕駛車輛產品的性能與用戶價值表現,結合量產與商業運營經驗,嬴徹科技首次在業內提出一套綜合評價指標體系,不僅關注自動駕駛性能,同時關注車輛運營安全、時效和成本的綜合表現。
而“安全高于一切”,也成為了嬴徹科技在自動駕駛卡車量產開發中的核心理念。將安全方法論與實踐獨立成章,提出了明確的設計開發步驟,首先提出功能安全設計目標和Fail-Operational(系統產生故障時仍能使用)要求,并將之具體化為流程安全、核心系統安全和整車安全三個維度的子目標,以及將安全目標分解成各個子系統和零部件的安全需求。
那么回到此前我們所說的,看了《白皮書》,就能實現3年量產智卡夢嗎?
馬喆人表示,嬴徹基于過去3年多的實踐深刻認識到,自動駕駛整車的量產?需要的是全新定義的全棧研發能力、前裝量產的工程極致能力以及自動駕駛安全的完整設計能力,三者缺一不可。
而贏徹科技所希望的,是借此白皮書給自動駕駛卡車賽道提供已經實踐驗證過的方法論。以期推動行業共享共創,消除量產相關經驗知識碎片化對從業者的困擾。
附件下載:贏徹科技:自動駕駛卡車量產白皮書.PDF
相關閱讀:
簡析汽車自動駕駛的路線之爭:攝像頭的純視覺和多種傳感器融合;






