
導(dǎo)讀:近些年,隨著自動駕駛技術(shù)的越來越普及,日常生活中見到的自動駕駛車輛也逐漸增多,新能源車上,也大都配備了各種各樣的輔助駕駛功能。而對于行業(yè)外的民眾們而言,其實不太能弄得清自動駕駛與輔助駕駛的區(qū)別,也就導(dǎo)致了在使用車輛輔助駕駛的過程中,過分地依賴車輛而忽視了安全,這里絕大部分是車企宣傳的問題,而作為消費(fèi)者,也只有清楚地搞清這兩者的區(qū)別,才能在使用過程中更加安全合理。
一、自動駕駛的初級階段——輔助駕駛
自動駕駛跟輔助駕駛,本質(zhì)上來說,區(qū)別在于駕駛員是否需要一直盡監(jiān)視的義務(wù)。曾經(jīng)"自動駕駛"仿佛一夜間成了特斯拉的代名詞。特斯拉夸大的宣傳,誤導(dǎo)消費(fèi)者,間接導(dǎo)致消費(fèi)者在駕駛過程中,沒有意識到自己在駕駛中的監(jiān)視責(zé)任,掉以輕心甚至睡著,發(fā)生了多起慘劇。駕駛只有Level2輔助駕駛系統(tǒng)的汽車,司機(jī)是有義務(wù)且必須時刻對車輛進(jìn)行監(jiān)視的。雖然特斯拉官網(wǎng)已經(jīng)將"自動駕駛"改成了"自動輔助駕駛",但讓民眾詳細(xì)了解輔助駕駛與自動駕駛的區(qū)別,筆者認(rèn)為是非常必要且關(guān)鍵的。
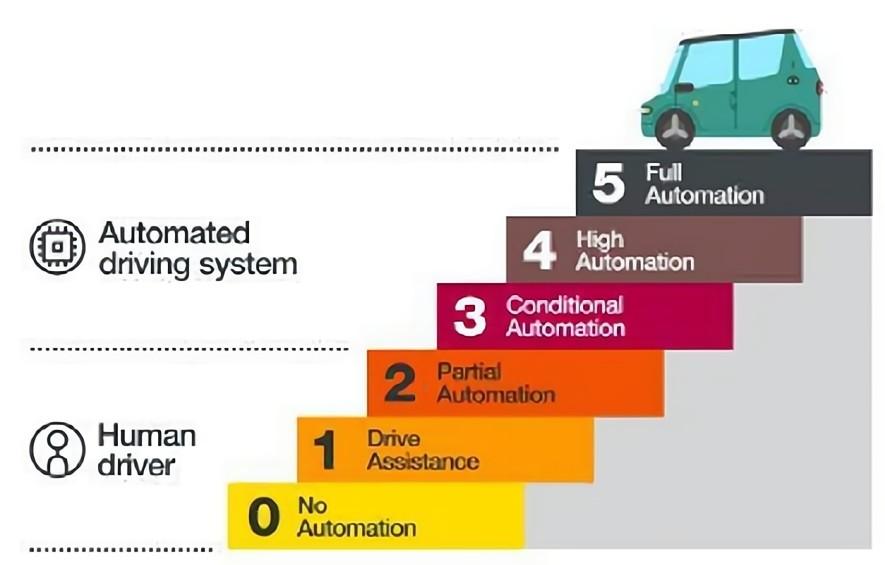
一般來說,自動駕駛分為L0-L5六個等級,而Level2及以下,目前都稱為輔助駕駛,直到Level3才開始稱得上“自動駕駛”,開始允許駕駛員不必一直盡監(jiān)視義務(wù)。但也是在某個特定的交通環(huán)境下讓駕駛員不用控制和監(jiān)視汽車,一旦檢測到環(huán)境的變化便有可能返回駕駛員駕駛模式。
對于輔助駕駛來說,司機(jī)必須時刻關(guān)注著車輛的運(yùn)行狀態(tài),并且在危險路段需要盡快接管使其退出,畢竟就目前的技術(shù)來說,現(xiàn)實生活中還有許多的corner case是難以解決甚至極少遇到的,對于沒有這部分極端場景案例數(shù)據(jù)的車廠來說,遭遇這類情況時發(fā)生問題的概率是比較大的,因此輔助駕駛時切記需要保證注意力的集中。
二、輔助駕駛功能
那么目前市面上比較常見且用戶經(jīng)常會用到的輔助駕駛功能主要有哪些呢?它們具體又能怎樣幫助到我們的日常駕駛呢?
1、自動緊急剎車(AEB:Autonomous Emergency Braking)
作為最基本的主動安全功能,檢測到前方一定距離內(nèi)有車輛行人或障礙物時,便發(fā)出警報提醒。當(dāng)小于安全距離時即便駕駛員沒有來得及踩剎車,系統(tǒng)會自動制動,以減少傷害。
2、追蹤巡航控制(ACC:Adaptive Cruise Control)
ACC基礎(chǔ)版是在自動巡航功能的基礎(chǔ)上,通過攝像頭或毫米波雷達(dá)等傳感器監(jiān)測前方車輛,與前車的速度保持一致。更高級版本ACC也可以在堵車時使用,跟隨前車停止或啟動。
3、車道保持輔助(LKAS:Lane Keep Assist System)
系統(tǒng)可對行車線進(jìn)行識別,通過控制方向盤,盡量使自車保持在車道中央行車。
4、變道輔助功能(LCA:Lane Change Assist)
前三個功能屬于輔助駕駛系統(tǒng)的標(biāo)配功能,現(xiàn)在也有不少車企像奔馳、日產(chǎn)等開始提供被動或主動變道輔助功能,駕駛員通過撥動轉(zhuǎn)向燈向系統(tǒng)提出轉(zhuǎn)向變線要求,系統(tǒng)根據(jù)周邊的車流情況,控制方向盤和速度,實施變道。由于對周邊車輛檢測精度要求很高,一般前后都配有攝像頭和毫米波雷達(dá)等,已達(dá)到精確的車輛信息。

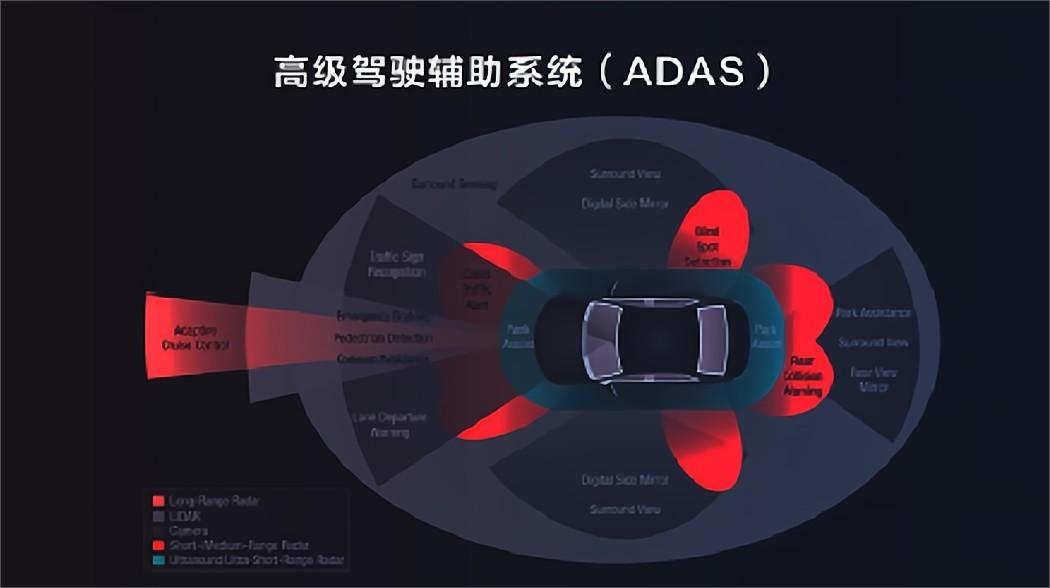
除了上述主流的輔助駕駛功能外,還有自動泊車,盲點(diǎn)顯示,車道偏移預(yù)警,前車防撞預(yù)警,交通標(biāo)志識別,駕駛員疲勞探測,遠(yuǎn)近光燈輔助功能等等。
三、實現(xiàn)輔助駕駛的關(guān)鍵技術(shù)
由上面的分析我們可以看到,實現(xiàn)輔助駕駛的難度是遠(yuǎn)遠(yuǎn)比自動駕駛少許多的,往往只是自動駕駛里的某個單獨(dú)的功能,將其單獨(dú)剝離開來率先讓民眾體驗最新的技術(shù),也減少開車過程中的疲勞,減輕負(fù)擔(dān)。
而實現(xiàn)這類輔助駕駛,目前一般來說量產(chǎn)車上都得配備以下幾類傳感器:
1、攝像頭:擅長識別障礙物的形狀和屬性(人類,自行車),可以檢測100m左右。但是對逆光雨霧天氣的適應(yīng)性差。
2、紅外激光雷達(dá):低成本方案,只能在低速情況下進(jìn)行近距離物體的檢測(30km/h,30m),小型汽車可用。
3、毫米波雷達(dá):探測距離比攝像頭遠(yuǎn),可達(dá)到150-200米。但是無法判斷形狀和大小,成本最高。
除了這三類以外,目前部分量產(chǎn)車型上已經(jīng)開始逐漸配備了昂貴的激光雷達(dá),以實現(xiàn)更多更先進(jìn)的輔助駕駛功能。激光雷達(dá)雖然價格較貴,但對于物體的檢測精度將會有極大的提升,也就更加保障了輔助駕駛行車過程中的安全性。隨著固態(tài)激光雷達(dá)和多線激光雷達(dá)成本的逐漸降低,量產(chǎn)車型上將會越來越多得看到此類傳感器。

除了傳感器之外,目前的輔助駕駛技術(shù)用到最多的便是車輛控制算法技術(shù)。通過感知的結(jié)果,直接經(jīng)由控制來實現(xiàn)對車輛的整體操控。一個好的控制算法能夠保障車輛行駛的安全性及舒適性,對乘客的乘坐體驗將會有極大的提升。
四、總結(jié)
目前,汽車企業(yè)走的基本都是漸進(jìn)路線,主流水平處于第1級與第2級之間。如若發(fā)展到第3級,也就進(jìn)入到了自動駕駛階段,那么乘客的自動駕駛體驗將會有一個質(zhì)的提升。從目前的技術(shù)來看,輔助駕駛只能在很少的場景給予到我們行車的幫助,并且由于要長時間注意力集中地關(guān)注著車輛行駛的狀態(tài),其實對于駕駛員來說并不輕松。未來道阻且長,等到真正自動駕駛技術(shù)成熟到來的一天,相信將極大提升我們的出行效率,也讓我們的出行變得更加安全。






