
摘要:自動駕駛汽車和先進駕駛輔助系統(ADAS)對更高帶寬、更低延遲提出了更迫切的需求。車載以太網已經成為搭建更高速汽車網絡的新骨干。對發射機、接收機、鏈路分段和高層協議功能進行的全面測試確保其得到成功實施。
推動汽車行業創新的主要動力可分成三大類:增強安全性、保護環境,以及通過互連提高便利性。為了實現這些目標,汽車制造商、汽車供應商、政府、學術界甚至傳統汽車行業之外的企業(如無線芯片制造商、移動設備制造商和無線服務提供商)都紛紛參與進來,全力開發先進駕駛輔助系統(ADAS)、互聯汽車技術乃至最終的目標 — 自動駕駛汽車。
ADAS 和自動駕駛汽車需要通過高帶寬和低延遲的網絡來連接所有傳感器、攝像頭、診斷工具、通信系統以及中央人工智能。
目前,線束無論從重量還是成本上來說,都在所有汽車零部件中排名第三。在汽車組裝過程中,線束安裝占到了人工成本的 50%。
車載以太網是應對這些挑戰的新興解決方案。就像 WiFi 是專用短程通信(DSRC)的基石一樣,以太網在傳統局域網(LAN)領域也是眾所周知、值得信賴、應用廣泛的解決方案。以太網有很多優勢,例如多點連接、更寬帶寬和低時延等等,這對于汽車制造商來說極具吸引力。不過若是在汽車中使用,傳統的以太網還是噪聲太大,很容易受到干擾。為了滿足汽車行業的特定需求,IEEE 現已制定了新的標準和協議。
一、自動駕駛需要以更快速度采集并處理更多數據
自動駕駛汽車中使用的各項技術應用了眾多新型電子元器件。第一類支持在無線電探測和測距(RADAR)、激光探測和測距(LIDAR)以及攝像頭中使用的傳感器實現融合。第二類包括車輛到車輛(V2V)、車輛到網絡(V2N)、車輛到基礎設施(V2I)、車輛到行人(V2P)、車輛到公用事業(V2U)以及車聯網(V2X)的無線通信。多種相鄰組件,比如采用高精度導航系統的高清(HD)地圖、功能強大的信號處理以及人工智能等,都是自動駕駛所需要的組件。
這些技術會產生、發送、接收、存儲和處理海量數據。例如,一個 LIDAR 模塊可以提供圍繞汽車的高精度、高分辨率三維和 360° 成像數據。LIDAR 模塊可能生成 70 Mbps 的數據流量,一個攝像頭可能生成 40 Mbps 的數據流量,RADAR 模塊可能生成 100 Kbps 的數據流量,而導航系統可能生成 50 Kbps 的數據流量。
此外,自動駕駛系統的等級越高,獨立傳感器的數量也將極大增長,由此產生的數據總量也更大。例如,二級自動駕駛系統可以提供縱向和橫向車輛運動控制,因此駕駛員可以放開雙手,并暫時休息一下眼睛。該系統可能需要使用 5 個 RADAR 傳感器和 5 個攝像頭。全自動駕駛系統(四級和五級)將需要多達 20 個 RADAR 傳感器和 6 個攝像頭,還要使用 V2X 通信。我們預測,一輛自動駕駛汽車每天將會產生大約 4 TB 的數據。這些數據需要以極短的延遲在高速、可靠的網絡上傳輸、存儲和共享,這正是基于車載以太網的高吞吐量、低延遲網絡的長處。
二、汽車串行總線概述
通過回顧主要的傳統汽車串行總線,包括 CAN、LVDS、LIN、MOST、FlexRay 和CAN FD,我們可以更好地理解為什么自動駕駛汽車和先進駕駛輔助系統現在需要車載以太網。

CAN(控制器局域網)— 1983 年
CAN 是 Bosch 公司開發的一種共享串行總線,其傳輸速率可達到 1 Mbps。CAN 后來經過 ISO 批準,成為一種國際標準。它的優點是經濟高效,而且可靠性高。但缺點是共享訪問,帶寬較低。CAN 主要在動力總成、底盤和車身電子設備中使用。
LVDS(低壓差分信令)— 1994 年
LVDS 是一種點到點鏈路,不是共享總線。它的成本比 MOST(媒體定向系統傳輸)低得多,很多汽車制造商都用它來傳輸攝像頭和視頻數據。不過,每個 LVDS 鏈路一次只能連接一個攝像頭或視頻輸出。
LIN(局域互連網絡)— 1998 年
LIN 是由汽車制造商和技術合作伙伴聯盟開發的。其速率只有 19,200 比特/秒,并且只需要一條共享線路,而 CAN 需要 2 條。LIN 采用了主從體系結構,而 CAN 將所有節點都視為是平等的。LIN 的成本比 CAN 低,其速度和成本正好適合車身電子設備,例如鏡子、電動座椅和配件等。
MOST(媒體定向系統傳輸)— 1998 年
MOST 采用環形體系結構,使用光纖或銅纜互連,數據速率可達到 150 Mbps(MOST150)。每個環可以包含 64 個 MOST 器件。對于汽車市場而言,MOST 的優勢是帶寬相對較高,但其價格也較為昂貴。它最初僅適用于攝像頭或視頻連接。
FlexRay — 2000
FlexRay 是一種數據速率高達 10 Mbps 的共享串行總線。它是由 FlexRay 聯盟開發的。該聯盟是由半導體制造商、汽車制造商和基礎設施提供商所建立的一個組織。與CAN 不同,它沒有內置的誤碼恢復功能,而是將誤碼處理留給了應用層。它的優勢是帶寬比 CAN 高,但缺點在于成本較高,而且需要共享使用媒體。FlexRay 主要用于高性能動力總成和安全系統,如線控驅動、主動懸架和自適應巡航控制。
CAN FD(靈活數據速率)— 2012 年
CAN FD 是 BOSCH 公司在 2012 年發布的一種標準,它是對原始 CAN 總線協議的擴展。其設計初衷是為了滿足汽車網絡對更高帶寬的要求。CAN FD 通過最大限度縮短協議時延和提供更高帶寬,實現更精確和接近實時的數據傳輸。CAN FD 可以與現有的 CAN 網絡兼容。
車載以太網
盡管傳統的汽車串行總線在各種汽車應用中發揮了重要作用,但它們也都有各自的缺點,而車載以太網能夠克服這些缺點。例如,大多數汽車串行總線都無法達到 LIDAR 所要求的 70 MB/s 數據速率。當各種傳感技術和無線通信技術整合在一起時,通常需要同時使用 LIDAR、RADAR、攝像頭和 V2X 通信。在這種情況下,需要傳輸的數據量超過了傳統汽車串行總線的現有容量。因此,汽車行業想要引入車載以太網,以便使自動駕駛和先進 ADAS 系統變成現實。
三、車載以太網是什么?
車載以太網是在汽車中連接電子元器件的一種有線網絡。其設計初衷是希望滿足汽車行業對帶寬、延遲、同步、干擾(例如 電磁干擾(EMI))、安全性和網絡管理等方面的要求。車載以太網的概念最初是由 Broadcom 提出的,后來 OPEN(單對以太網)聯盟采納了這一標準并承擔起管理職責。OPEN 推廣 Broadcom 的 100 Mbps BroadR-Reach 作為多供應商許可解決方案。100 Mbps PHY 實施借鑒了 1 Gbps 以太網的技術,能夠在一對線纜上實現 100 Mbps 雙向傳輸。此技術使用了更先進的編碼方案,可以消除回聲,將基本頻率(從 125 MHz)降至 66 MHz。這使得以太網能夠達到汽車EMI 技術指標。IEEE 和 OPEN 聯盟已在 IEEE 802.3 和 802.1 小組中制定出并負責維護 100 Mbps 和 1000 Mbps 車載以太網的物理層標準。
在早期階段,以太網從 DLC 診斷端口到網關只有一條 100Base-T1 1TPCE 鏈路,所以它只用于診斷和固化軟件更新。圖 1 顯示了車載以太網作為新骨干(使用更快速的千兆位以太網 1000Base-T1 RTPGE 鏈路)的角色演變。
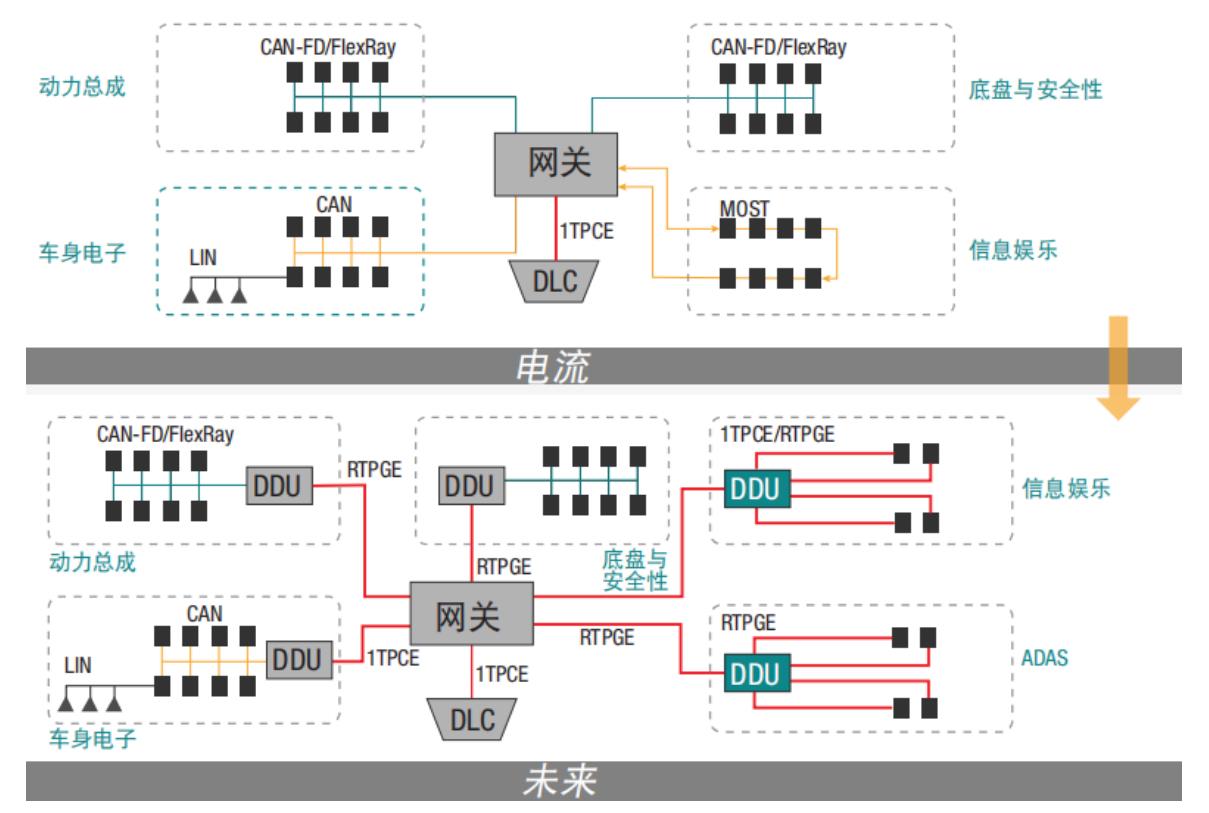
圖1:車載以太網的演進過程
四、為何選擇車載以太網?
在車載電子系統連接和通信、自動駕駛和 ADAS 系統方面,車載以太網與傳統汽車串行總線相比具有明顯優勢。汽車電子體系結構正變得越來越復雜,其中包含的傳感器、控制器和接口越來越多,并且需要更高的帶寬、更多的計算機和通信鏈路。連接這些系統的線束無論是重量還是成本都排在目前汽車所有零部件中的第三位。現在,汽車制造商使用多種不同的專有標準來提供通信功能;大部分元器件都使用一條專用線路或電纜。車載以太網是支持所有通信的統一標準。它使用一對電纜連接每個電子元器件與中央網絡交換機。Broadcom 和博世進行的聯合調查顯示,通過使用非屏蔽雙絞線(UTP)電纜和更小的緊湊型連接器,連接成本最多可降低 80%,線纜重量最多可減輕30%。
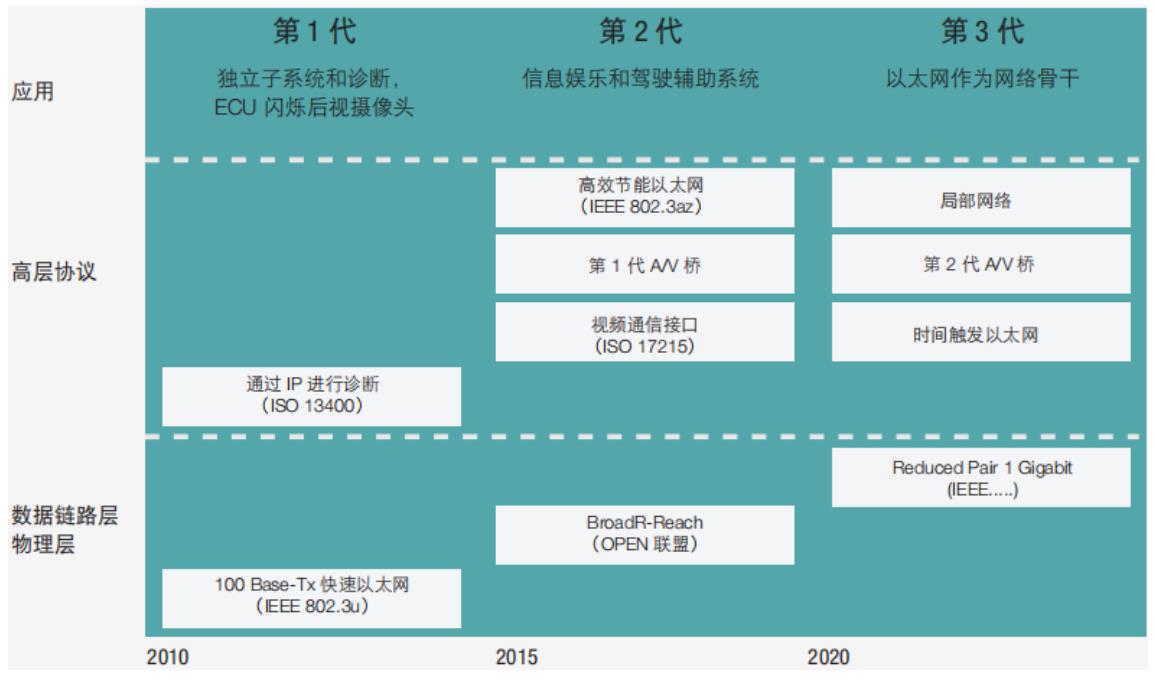
圖2:車載以太網的發展過程
五、車載以太網技術的演進
圖2中的進步得益于多個技術領域的進步,包括:
AUTOSAR(汽車開放系統體系結構)
AUTOSAR 是開放和標準化的汽車軟件體系結構。它由汽車制造商、供應商和工具開發商聯合開發完成。AUTOSAR 包括在汽車中使用的 TCP/ IP 協議模型。汽車行業已經達成一致,同意將 AUTOSAR 確立為標準,各家汽車制造商將在實施標準層面展開競爭,而不必再對標準本身提出爭議。該標準實施將使多個設備可以在一個共享網絡上無縫運行。
單對以太網(OPEN)
Broadcom 開發了BroadR-Reach 作為專有物理層標準,支持更長距離的 100 Mbps 銅纜以太網連接。該標準在物理層上采用了千兆以太網銅纜技術,包括多電平 PAM-3 信令和更好的編碼方案,減少了電纜所需要的帶寬。它還使用了回聲消除器,實現在一對線纜中雙向傳輸數據。這個標準的帶寬為 27 MHz,比 100Base-T 標準 62.5MHz 的帶寬小,因而達到了汽車 EMI 要求。OPEN SIG 開發了一個獲得許可的開放標準,并得到汽車市場主流廠商的支持。業界已經認識到 100 Mbps 對于視頻傳輸已經足夠,但它還不足以充當汽車中的骨干網,特別是無法滿足 ADAS 和自動駕駛系統的需求,為此 IEEE 802.3 工作組( 802.3bp)成立了一個小組,其任務是定義通過一對雙絞線實現 1000 Mbps(1 Gbps)數據速率的新標準。這個千兆位以太網物理層標準被稱為 1000Base-T1(1 代表 1 對)。
時間同步
有些汽車算法要求多個傳感器同時采樣,或者將執行某項測量的時間作為參考時間。由于這些測量是在不同的節點中進行,因此汽車中的所有節點必須做到亞微秒級的精確時間同步。用于橋接局域網中時間敏感型應用的 IEEE 802.1AS 計時和同步標準已被選作同步計時標準。該標準使用了 IEEE 1588 v2 的配置文件,并引入了一種簡化的方法來更快選擇主時鐘。
時間觸發以太網
一些時間敏感型控件要求通信延遲在 1 微秒之內,以便控制器可以快速獲得傳感器讀數或是控制對時間要求極為嚴格的功能。在傳統以太網中,數據包必須逐個傳輸,即使達到千兆位的速度,傳輸一個數據包也需要幾百微秒。IEEE 802.3br(Interspersed Express Traffic)工作組正在開發一個系統來解決這個問題,其中高優先級的數據包(稱為 Express 數據包)可以中斷現有數據包的傳輸過程優先進行傳輸,當它傳輸完畢后,被中斷的數據包再繼續進行傳輸。
AV 橋接
ADAS 主要依賴從攝像頭和其他傳感器及時獲得數據。當在計算機上觀看視頻時,可以使用緩沖方式來解決網絡計時不可靠的問題,但汽車 AV 系統不能這樣,它需要同時控制延遲和保證帶寬。時間敏感網絡任務組制定了相應的規范,支持時間同步的低延遲數據流業務。
成功實施的全面測試要求
車載以太網工程師需要處理常見的高頻電路板設計問題,包括信號噪聲、信號質量、串擾、反射、阻抗匹配和直流電源完整性。為了確保成功實施和可靠運行,車載以太網還需要對物理層、協議、一致性、安全性和線束執行全面的測試。物層層一致性測試有三個測試點(圖 3):發射機及協議觸發和解碼;鏈路分段,包括線束和連接器;接收機。

圖3:車載以太網的物理層測試點
發射機測試
收發信機測試與其他高速數字標準的物理層表征解決方案相似。工程師必須選擇一個包含協議觸發與解碼軟件包的測試解決方案,此軟件包將查看數據流量和協議層動態,從而節省調試早期設計的時間。所有必需的一致性測試都需要在設置、配置和報告階段中預先打包,以便設計人員可以專注于他們的核心任務,按期完成工作。

接收機測試
功能強大的 100Base-T1 接收機(RX)一致性測試應用軟件應能自動配置所有必需的測試設備,簡化并加快整個測試過程。該軟件還提供比特誤碼率測試(BERT 或 BER 測試)。
簡化接收機一致性測試
自動配置所有必需設備,縮短測試時間
以圖形方式顯示與被測器件的連接
生成 HTML 格式且可打印輸出的合格/不合格測試報告,報告中還包含裕量分析結果
鏈路分段測試
一個完整的鏈路分段一致性測試解決方案需要支持電纜測試、連接器測試、通信信道測試、連接器串擾測試,以及跨越整個通信信道的串擾測試。
高層協議測試
車載以太網不僅僅需要物理層測試。驗證解決方案還需要更高層的測試方法,包括汽車TCP/IP 協議模型、時間同步(IEEE 802.1AS)、音頻視頻橋接傳輸(802.1Qav)以及預定的流量傳輸(IEEE 802.1Qbv)協議實施。下面的圖 4 顯示了完整的車載以太網協議模型。
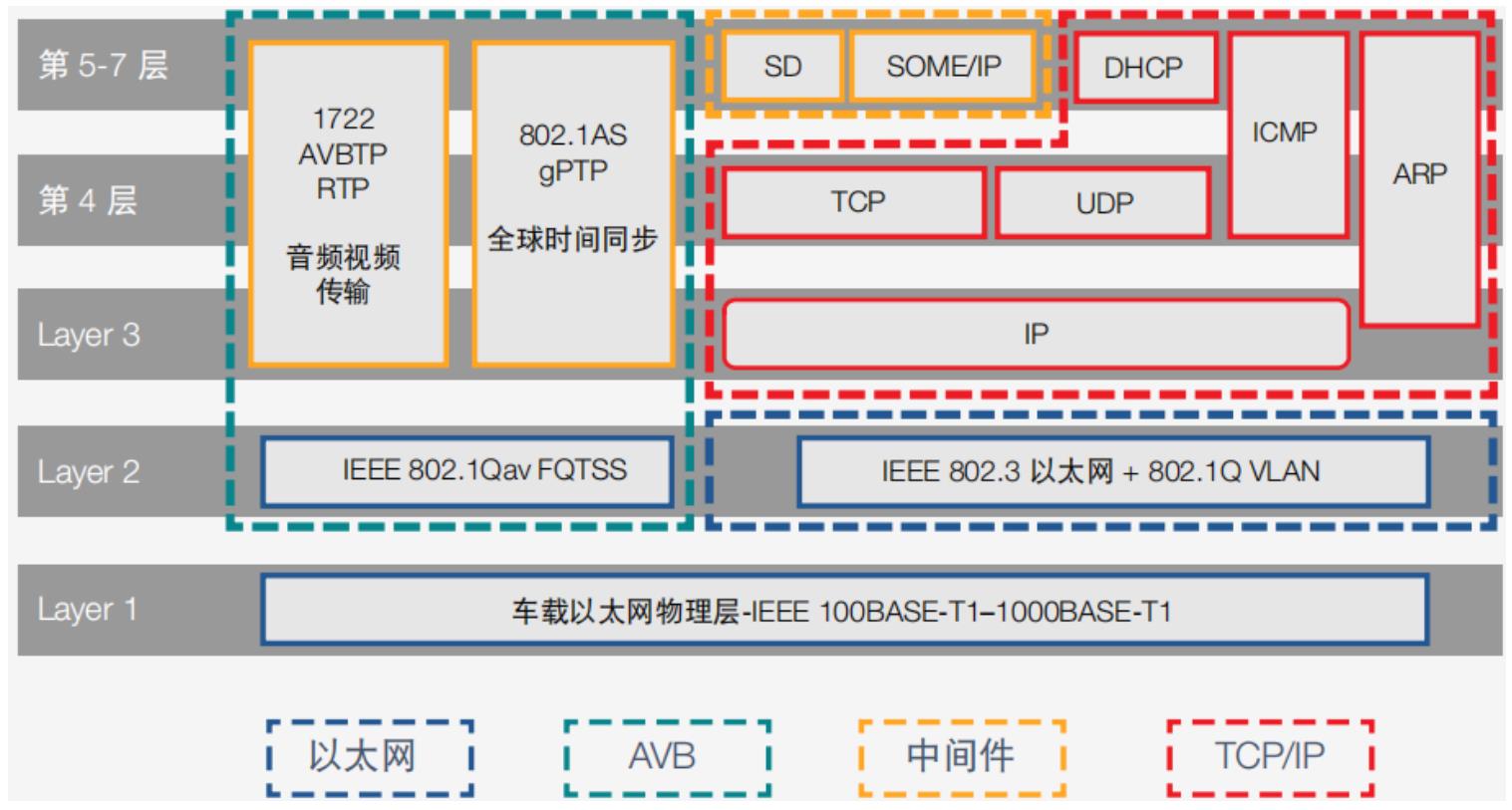
圖4:車載以太網的完整模型
六、車載以太網是先進駕駛輔助系統的未來
自動駕駛和 ADAS 將會造福社會,但也會給工程師帶來許多新的測試挑戰。目前,汽車對高數據速率、帶寬和數據安全性的需求不斷提高,同時還要求做好更充分的準備應對未來需求,車載以太網為此提供了必要的先進功能,并克服了傳統汽車串行總線在車載電子系統連接和通信方面的缺點。是德科技提供了性能卓越的解決方案,能夠幫助工程師全面測試發射機、鏈路分段、接收機以及更高層的協議功能,最終成功實施車載以太網。
來源:是德科技






