
導讀:線控轉(zhuǎn)向有廣義和狹義之分。廣義的線控轉(zhuǎn)向是指由電信號控制轉(zhuǎn)向功能的轉(zhuǎn)向系統(tǒng),不一定取消轉(zhuǎn)向輪和方向盤之間的機械連接;狹義的線控轉(zhuǎn)向是指由電信號控制轉(zhuǎn)向功能,并且取消了轉(zhuǎn)向輪和方向盤之間的機械連接的轉(zhuǎn)向系統(tǒng)。狹義的線控轉(zhuǎn)向系統(tǒng),又可以分為帶方向盤的和不帶方向盤的,假如帶了方向盤,方向盤一般不隨車輪轉(zhuǎn)動——比如耐世特的靜默方向盤線控轉(zhuǎn)向系統(tǒng)。
在本文的語境中,如無特殊說明,線控轉(zhuǎn)向均特指狹義的線控轉(zhuǎn)向。
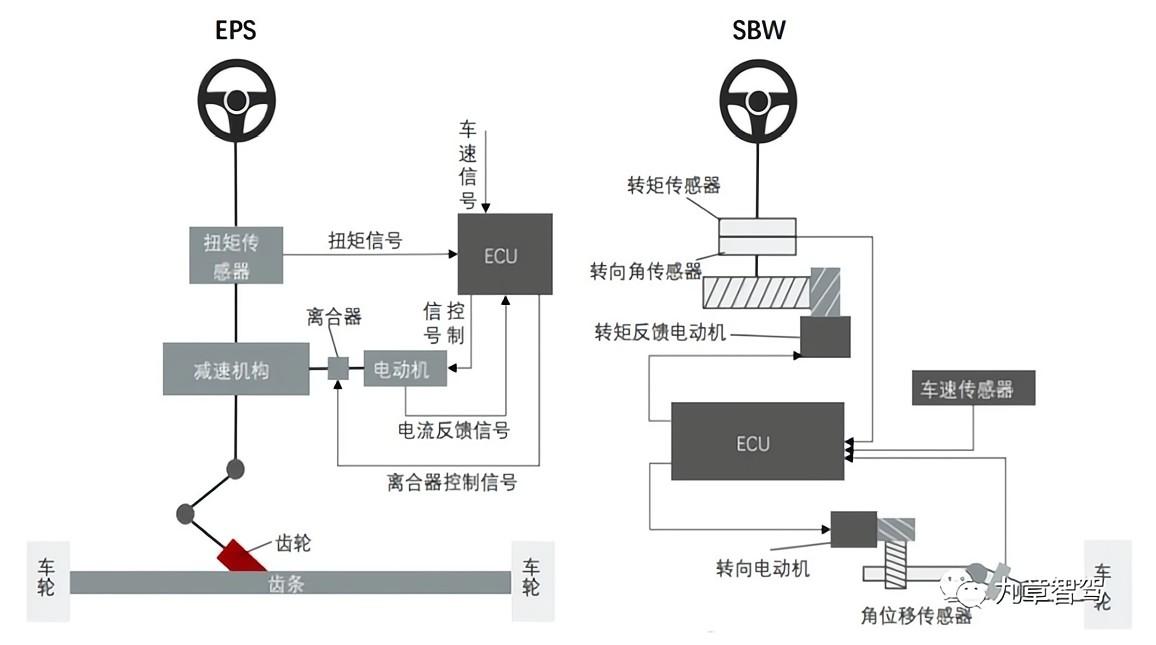
目前在乘用車上普遍使用的是電動助力轉(zhuǎn)向系統(tǒng)(Electric Power Steering,EPS),屬于“廣義”線控轉(zhuǎn)向的一種,其滲透率已超過90%。如上圖所示,EPS是在駕駛員轉(zhuǎn)動方向盤之后,轉(zhuǎn)矩傳感器記錄轉(zhuǎn)向扭矩并傳輸給電控單元,電控單元計算出轉(zhuǎn)向助力控制伺服電機工作從而實現(xiàn)助力。
與電動助力轉(zhuǎn)向系統(tǒng)不同的是,線控轉(zhuǎn)向系統(tǒng)(Steering By Wire System,SBW)由電控單元控制的轉(zhuǎn)向電動機驅(qū)動車輪轉(zhuǎn)動,車輪和方向盤之間沒有機械連接。
在線控轉(zhuǎn)向系統(tǒng)中,車輪轉(zhuǎn)向執(zhí)行器增加了線控的接口,轉(zhuǎn)向力矩完全依靠下轉(zhuǎn)向執(zhí)行器來輸出,而下轉(zhuǎn)向執(zhí)行器輸出力的方向和大小以及轉(zhuǎn)動的速度都依賴于控制算法的信號。這意味著,轉(zhuǎn)向系統(tǒng)可以完全由控制算法來接管,而無需依賴于手工轉(zhuǎn)動方向盤,如此一來,自動駕駛功能的實現(xiàn)就具備了一項先決條件。
其實,線控轉(zhuǎn)向并不是一個新的概念。早在20世紀50年代,TRW和Kasselmann就提出了線控轉(zhuǎn)向的概念,不過當時僅僅停留在概念中。
到了1990年,德國奔馳公司開始了線控轉(zhuǎn)向的研究,并于1996年將開發(fā)的線控轉(zhuǎn)向系統(tǒng)應用于F200概念車上。此后很多研究機構(gòu)、主機廠、零部件廠商例如日本國立大學、寶馬、捷太格特等都對線控轉(zhuǎn)向展開了研究,并陸續(xù)推出了一些代表性產(chǎn)品。
1999年,寶馬汽車公司推出概念車BMWZ22。在應用了線控轉(zhuǎn)向技術(shù)后,此款車能夠?qū)崿F(xiàn)可變傳動比,方向盤需要轉(zhuǎn)動的最大角度減少到了160度,極大降低了緊急轉(zhuǎn)向時駕駛員的操作難度。
2016年,采埃孚(ZF)和天合汽車(TRW)合并后展示的一輛原型車上搭載了采埃孚天合的前后橋轉(zhuǎn)向系統(tǒng),該系統(tǒng)可實現(xiàn)純電動操控。2018年,博世華域與奧迪合作的線控轉(zhuǎn)向產(chǎn)品搭載于奧迪A3上在全國巡回展示。
然而,時至今日,線控轉(zhuǎn)向產(chǎn)品尚未大規(guī)模應用在乘用車上。2013年,英菲尼迪旗下的Q50上市,此款車上搭載了帶機械冗余的線控轉(zhuǎn)向。然而2014年,英菲尼迪就對Q50實施了召回,原因是線控轉(zhuǎn)向系統(tǒng)存在安全問題。此后,市面上一直沒有真正意義上搭載了線控轉(zhuǎn)向的汽車量產(chǎn)。
直到2022年4月,豐田旗下的bZ4X上市,海外版產(chǎn)品使用了捷太格特的線控轉(zhuǎn)向系統(tǒng)One Motion Grip 。在此款產(chǎn)品上,方向盤和前輪之間沒有機械連接,取而代之的是電線和電子系統(tǒng),方向盤根據(jù)汽車行駛速度和車輪轉(zhuǎn)向角度改變轉(zhuǎn)向比和力反饋。
但很難說bZ4X的上市代表著線控轉(zhuǎn)向在乘用車上成功地實現(xiàn)了量產(chǎn)應用。
2022年6月,因為輪轂問題,豐田在海外市場對bZ4X實施了召回,此時大部分bZ4X還未正式交付。10月,豐田在全球范圍內(nèi)再次召回bZ4X,原因仍然是輪轂問題。在中國市場,因為法規(guī)問題,bZ4X仍然采用了帶機械連接的轉(zhuǎn)向系統(tǒng)。所以目前仍然不能說線控轉(zhuǎn)向在乘用車上成功地實現(xiàn)了量產(chǎn)應用。
有投資人表示短期內(nèi)對線控轉(zhuǎn)向的落地不太看好,理由是目前線控轉(zhuǎn)向的性價比太低,成本高但無法給駕駛員帶來明顯的體驗提升。但今年10月采埃孚與蔚來簽訂協(xié)議要共同研發(fā)線控轉(zhuǎn)向產(chǎn)品,耐世特在2022年的中報上公告拿下了某主機廠金額達20億元的線控轉(zhuǎn)向系統(tǒng)訂單。可見,即便之前的案例算不上成功,仍然有廠商在這一領域堅持研發(fā)。
1. 研發(fā)線控轉(zhuǎn)向的價值
那么,大家為什么要研究線控轉(zhuǎn)向?線控轉(zhuǎn)向可以給用戶帶來哪些體驗的提升呢?
1.1 底盤線控化的一部分
有投資人提到,智能化時代,汽車的電子電氣架構(gòu)由分布式向域集中式再向中央集成式發(fā)展。在這種背景下,轉(zhuǎn)向作為底盤的一部分,隨著上下車身的解耦以及高級別自動駕駛的實現(xiàn),線控化是必然的趨勢。
算法可以實現(xiàn)比人更快的響應速度以及更高的準確度,如今很多乘用車具備的車道緊急避障功能就依賴于算法的快速響應以及精準控制。隨著高等級自動駕駛的落地,用算法來控制轉(zhuǎn)向?qū)⒊蔀閯傂琛?
清華蘇研院底盤所所長高峰認為“制動、轉(zhuǎn)向、懸架的線控都是底盤域集中控制的一部分。制動會向IPB+RBU(<=L3)、EMB(L4&L5)發(fā)展。轉(zhuǎn)向會從有機械耦合(<=L2), 向無機械耦合(L3&L4)、無方向盤采用底盤備用終端(L5)發(fā)展。”
1.2 車身設計更靈活
線控轉(zhuǎn)向取消了方向盤和轉(zhuǎn)向輪之間的機械連接,給車身設計帶來了更多的靈活性。機械連接的取消一方面能夠節(jié)省駕駛位的空間,駕駛員腿部可以更舒展;另一方面也使得方向盤和轉(zhuǎn)向輪實現(xiàn)了解耦,因為方向盤和轉(zhuǎn)向輪不必同時轉(zhuǎn)動了。
解耦之后,方向盤就可以伸縮,也可以用來實現(xiàn)其他功能。假如未來L4級別的自動駕駛得以實現(xiàn),除用于控制車輛行駛外,方向盤還可以支持娛樂功能。可以想象這么一個場景,把游戲的界面投影到HUD,方向盤充當手柄,用方向盤來控制游戲中的道具。此外,還可以在方向盤上做一些跟音樂相關(guān)的律動,給用戶帶來更加真實的體驗。
另外,假如實現(xiàn)了>=L3級別的自動駕駛,在駕駛員不用接管的時候,方向盤因為機械連接的存在一直跟隨車輪轉(zhuǎn)動,駕駛員的體驗會比較差。
1.3 傳動比更靈活
汽車轉(zhuǎn)向的時候,方向盤轉(zhuǎn)動的角度和車輪轉(zhuǎn)動的角度的比值叫做傳動比。在傳統(tǒng)的轉(zhuǎn)向系統(tǒng)中,方向盤和車輪執(zhí)行器有機械連接,傳動比是固定的。然而,一旦把機械連接去掉,傳動比就是可變的。
為什么需要可變傳動比呢?主要是低速行車的時候調(diào)小傳動比可以使轉(zhuǎn)向操作更省力,以及在高速行車的時候調(diào)大傳動比可以避免不小心偏離車道。
低速行車的狀態(tài)下,轉(zhuǎn)動方向盤會相對吃力。在需要掉頭的時候,假如不調(diào)節(jié)傳動比,方向盤需要轉(zhuǎn)動較大的角度才能帶動車輪轉(zhuǎn)動相應的角度。若將低速行車時的傳動比調(diào)小,那么方向盤僅需轉(zhuǎn)動較小的角度就可以帶動車輪轉(zhuǎn)動掉頭所需的角度,從而實現(xiàn)便捷掉頭。
高速行車狀態(tài)下,方向盤很容易轉(zhuǎn)動,駕駛員不經(jīng)意間的動作就可能帶動方向盤轉(zhuǎn)動可觀的角度,假如車輪跟隨方向盤也轉(zhuǎn)動相應的角度,車輛有可能偏離車道造成危險。那么,將高速行車時的傳動比調(diào)大,就能較好地規(guī)避因駕駛員誤操作帶來的風險。
此外,還可以根據(jù)場景做一些定制化設計。濟馭科技總經(jīng)理羅永昌提到,“雖然EPS也可以在設計時通過調(diào)節(jié)齒輪大小改變轉(zhuǎn)向比,但一旦設計好之后就無法改變了;相比之下,線控轉(zhuǎn)向就更加靈活,在上車之后也可以根據(jù)場景做定制化設計。”
某測評博主表示“bZ4X的轉(zhuǎn)向是非常運動的設定。首先這臺車的方向盤盤幅就比較小,握在手里非常有運動型車的味道,并且在轉(zhuǎn)動方向盤時,車頭會立即做出快速響應,隨著轉(zhuǎn)向角度的增加,回正的力度也會以極其線性、細膩的方式變重。在快速過彎時,bZ4X的轉(zhuǎn)向系統(tǒng)也會呈現(xiàn)出相當強的中心感,駕駛者可以通過手上的回饋力感知到前輪轉(zhuǎn)向角度的變化。而在日常駕駛時,bZ4X的轉(zhuǎn)向手感輕重適中,并不會太過于輕飄導致沒有安全感,但也不會過于沉重導致開起來很累。”
當前的EPS系統(tǒng)畢竟帶著機械連接,在自由度上不及線控轉(zhuǎn)向系統(tǒng)。比如上文的博主測評中提到的豐田bZ4X可以實現(xiàn)“在轉(zhuǎn)動方向盤時,車頭會立即做出快速的響應,隨著轉(zhuǎn)向角度的增加,回正的力度也會以極其線性、細膩的方式變重。”假如用EPS系統(tǒng),恐怕就很難實現(xiàn)。
1.4 降低車身相撞的危害程度
漢鼎智能CEO劉澤金告訴筆者:“兩輛汽車相撞的時候,在相撞力的作用下,轉(zhuǎn)向系統(tǒng)的機械連接由于沒有能量回收功能,會把方向盤往駕駛員的方向推,從而對駕駛員造成傷害。有數(shù)據(jù)顯示,駕駛員在車禍中受傷,很多時候都是和方向盤的撞擊造成的。假如轉(zhuǎn)向系統(tǒng)是不帶機械連接的,在碰撞的瞬間,方向盤和人之間的相對速度會大幅減小,相應地,沖擊力也會大幅減小,駕駛員受到的傷害就會減輕很多。”
當然,安全氣囊也可以實現(xiàn)類似的效果,只是線控轉(zhuǎn)向可以從另外一個角度減輕兩車相撞對駕駛員造成的傷害。
誠然,線控轉(zhuǎn)向可能是未來的趨勢,但在L4級別的自動駕駛何時能落地尚不明朗的當下,搭載線控轉(zhuǎn)向有必要嗎?從筆者目前了解到的信息來看,產(chǎn)業(yè)界人士、投資人還沒有達成共識。
一方認為,在L4級別的自動駕駛到來之前,搭載線控轉(zhuǎn)向是沒有意義的。因為就目前的情形來看,線控轉(zhuǎn)向給用戶帶來的體驗提升很有限,頂多是錦上添花,遠非雪中送炭。自動駕駛最剛需的功能——用電信號來控制轉(zhuǎn)向輪,現(xiàn)有的EPS系統(tǒng)也可以實現(xiàn)。
而且在技術(shù)還不夠成熟的情形下,線控轉(zhuǎn)向還會帶來一些額外的麻煩。比如拿掉機械連接后駕駛員會失去“路感”,——當前的路感模擬器的效果還沒有到令人特別滿意的程度。以現(xiàn)有的技術(shù)水平,路感模擬器還很難恰到好處地把需要反饋的信息反饋給駕駛員,同時把不需要的信息過濾掉。
另一方認為,那些認為“線控轉(zhuǎn)向沒必要”的觀點,本質(zhì)上還是僅僅把車作為出行工具來看待。智能底盤行業(yè)專家齊佳寧認為,隨著智能化的演進,未來的汽車遠遠不止是一個代步工具,它可以是智能移動空間。從這個角度,能把方向盤解放出來發(fā)揮娛樂功能的重要性就大大增加了。而且在實現(xiàn)了>=L3級別的自動駕駛之后,假如沒有線控轉(zhuǎn)向,駕駛員不操控的時候,車輪通過機械連接帶動方向盤轉(zhuǎn)動就會讓人感覺很別扭。
雖然從功能的角度看,線控轉(zhuǎn)向好像不是剛需,但當基本的技術(shù)越來越成熟的時候,能給用戶體驗帶來提升的東西都非常值得去嘗試。手機當初被發(fā)明出來是因為人們需要通信,但在智能手機時代,幾乎沒有人會在買手機的時候去關(guān)注它的通話功能——人們更在乎的可能是各類app運行是否流暢,拍照是否好看等,而在智能手機被大眾全面認可之前,這些都會被認為“不是剛需”。
2. 線控轉(zhuǎn)向上車的阻礙因素
拋開上述關(guān)于線控轉(zhuǎn)向“是否必要”的爭論,從當前的實際情形來看,線控轉(zhuǎn)向的量產(chǎn)確實有很多困難。為什么時至今日線控轉(zhuǎn)向仍然沒有成功的量產(chǎn)案例呢?阻礙線控轉(zhuǎn)向上車的因素有哪些呢?
筆者總結(jié)了和幾位行業(yè)專家訪談的內(nèi)容,發(fā)現(xiàn)當前的線控轉(zhuǎn)向主要面臨著安全性尚未得到大規(guī)模驗證、控制算法性能不夠好、路感模擬等技術(shù)不夠成熟導致用戶體驗不夠好、成本仍然居高不下、存量市場抵制等問題。
2.1 安全性尚未得到大規(guī)模驗證
傳統(tǒng)有機械連接的轉(zhuǎn)向系統(tǒng)的安全目標是fail-safe,線控轉(zhuǎn)向的安全目標是fail-operational,即系統(tǒng)失效后還能繼續(xù)工作。現(xiàn)在行業(yè)里對線控轉(zhuǎn)向的故障率有定量的要求。傳統(tǒng)的故障率,有一個指標,是1000個器件在100萬個小時—即10的6次方小時里,允許出現(xiàn)100多次故障。而線控轉(zhuǎn)向,10的6次方小時里則只能有個位數(shù)的故障發(fā)生。
有機械連接的時候,即使系統(tǒng)出現(xiàn)故障,最差情況下還能依靠“蠻力”實現(xiàn)轉(zhuǎn)向。拿掉機械連接后,線控轉(zhuǎn)向完全依靠軟件算法實現(xiàn)對車輪的轉(zhuǎn)向控制,假如行駛過程中程序出現(xiàn)了問題,駕駛員沒有辦法及時解決問題。
通常來講,軟件的失效率可能比機械高一點。存在一些使用線控轉(zhuǎn)向時才需要考慮的故障,比如在車輛行駛過程中,內(nèi)存溢出導致程序崩潰從而使得轉(zhuǎn)向系統(tǒng)無法工作;或者由于惡劣環(huán)境、電源瞬變、器件失效等造成ECU的損壞,導致在需要轉(zhuǎn)向的時候程序沒有發(fā)出相應的轉(zhuǎn)向指令或者在不需要轉(zhuǎn)向的時候程序發(fā)出了轉(zhuǎn)向指令等。
在心理層面,線控很難像機械連接那樣給人以安全感——對于駕駛員來說,軟件畢竟是一個看不見摸不著的東西,什么情況下會出現(xiàn)問題,出現(xiàn)問題了怎么解決都是未知的。因此,取消機械連接的前提是線控轉(zhuǎn)向的失效率需要被證明是明顯低于傳統(tǒng)轉(zhuǎn)向系統(tǒng)的。只有這樣,用戶才可能接受。英菲尼迪在Q50上搭載的轉(zhuǎn)向系統(tǒng)帶了機械冗余,可能也有類似的考慮。
即使有機械連接,也不是百分百安全,因為機械連接也可能因生銹而失效,當然了,線控轉(zhuǎn)向當前沒有成功的量產(chǎn)案例,即使是帶機械冗余的系統(tǒng)也沒有。雖然有研究機構(gòu)、供應商發(fā)布過demo產(chǎn)品,而且從實驗的角度說明目前理論上產(chǎn)品的安全性是達標的,但在對安全性要求很高的汽車行業(yè),沒有量產(chǎn)案例就很難令人信服。
目前,很多廠商都在研究拿掉機械連接后如何保證安全性的方案。
清華蘇研院底盤所所長高峰提到,“我們會在一些線控轉(zhuǎn)向系統(tǒng)上加裝機械連接,當然控制方式還是線控。然后再增加一套安全防護措施,即算法、電路的硬件、傳感器、電源、控制板都是兩套。因為我們不可能讓駕駛員去試錯或承擔任何風險,所以安全冗余都會做充分。加上機械連接后,線控轉(zhuǎn)向就可以大批量生產(chǎn)并搭載在乘用車上,然后我們再去分析帶機械連接的線控轉(zhuǎn)向系統(tǒng)。”
“上車運行一段時間后,我來看反饋數(shù)據(jù),就可以知道有哪些問題是傳感器造成的,哪些是控制器造成的,哪些是執(zhí)行器造成的,哪些是電路造成的,還可以知道系統(tǒng)的流暢度、時延等性能的情況。有了充足的數(shù)據(jù)之后,一方面可以驗證轉(zhuǎn)向系統(tǒng)的安全性,另一方面也可以根據(jù)這些反饋數(shù)據(jù)去做改進。”
“其實現(xiàn)在理論上來講,我們?nèi)哂嗟木€控轉(zhuǎn)向系統(tǒng)—電源,傳感器、算法、電路硬件、控制板等都做雙份,已經(jīng)可以做到1000個件在10的6次方小時里只出現(xiàn)個位數(shù)的故障。假如采用單電源,其他部件都配備雙份,可以實現(xiàn)10的6次方小時里出現(xiàn)10到100次故障。只是,現(xiàn)在這些結(jié)果都是理論上的,還沒有經(jīng)過大規(guī)模的路測驗證。”
2.2 控制算法的性能還不夠好
在自動駕駛系統(tǒng)中,線控轉(zhuǎn)向?qū)儆趫?zhí)行機構(gòu),執(zhí)行機構(gòu)發(fā)揮好作用的前提是上游的控制算法能夠準確及時地發(fā)出指令。只有控制算法的穩(wěn)定性、可靠性、及時性都足夠好,線控轉(zhuǎn)向系統(tǒng)才能真正地發(fā)揮好轉(zhuǎn)向功能。
具體來講,控制算法要確保主動轉(zhuǎn)向時車身的穩(wěn)定性,以及轉(zhuǎn)向時前輪和后輪的協(xié)調(diào)。此外,控制算法還需要確保角度控制的精度以及實時性,假如精度不夠或者在一些緊急情況下轉(zhuǎn)向指令出現(xiàn)延時都可能造成很嚴重的后果。
控制算法足夠好,需要感知、預測、規(guī)劃整個鏈條都足夠好。也即是說,線控轉(zhuǎn)向并不能孤立地發(fā)揮作用,而是依賴于整個自動駕駛系統(tǒng)的優(yōu)化。
然而,目前國內(nèi)的自動駕駛供應商做的事情通常比較分散,有全棧能力的機構(gòu)不算太多。假如有一個機構(gòu)可以把感知、決策,規(guī)劃、執(zhí)行一起優(yōu)化,那么整套系統(tǒng)效果可能會比較好,因為這些模塊需要互相配合。
雖然現(xiàn)在很多車上都搭載了輔助駕駛系統(tǒng),即當前的控制算法已經(jīng)可以達到足以上車的準確度,但是要達到線控轉(zhuǎn)向系統(tǒng)要求的99.9999%還需要一段時間。
根據(jù)某位行業(yè)專家的說法,“線控轉(zhuǎn)向的鋪貨上量依賴于高級別自動駕駛的實現(xiàn)。從這個角度來講,我認為線控轉(zhuǎn)向的突破會是一個跳變,一旦高級別自動駕駛實現(xiàn)了,那么線控轉(zhuǎn)向的需求可能立馬就上升了。而且到了那個時候,上端的感知、決策、規(guī)劃等算法已經(jīng)成熟,控制算法的準確度也將不再是問題。”
2.3 路感模擬等技術(shù)不成熟導致體驗不夠好
當前,L4級別的自動駕駛還未實現(xiàn),行車過程中還是有很多需要駕駛員來操控的情形。假如拿掉方向盤和轉(zhuǎn)向輪之間的機械連接,路面的信息無法傳遞上去,駕駛員感受不到轉(zhuǎn)向阻力和路面的顛簸,會失去“路感”,那么就需要加裝一個路感模擬器。
路感模擬器通過馬達震動傳感器來感知底盤的震動情況,把有必要反饋的信息,通過馬達模擬出來,傳遞到方向盤,使駕駛員能有直觀的感受。反饋的信息主要包括齒條力的大小以及輪胎的波動,尤其是30赫茲以下的波動。同時,路感模擬器會過濾一部分不必要的信息,比如一些無意義的抖動,減輕駕駛疲勞。
浙江思銳智能科技CEO黃留清提到:“配備路感模擬器后,在系統(tǒng)中沒有物理連接的情況下,輪胎的不必要振動不會傳遞到車內(nèi),比如路過地面的大坑,但駕駛員在轉(zhuǎn)向時或者正常行駛時仍能體驗到力反饋。”
然而,當前的路感模擬技術(shù)還不成熟,無法把路面信息較好地反饋給駕駛員。對于哪些信息需要反饋、哪些信息需要過濾的問題,主機廠還沒有明確的要求,供應商自然就還沒有形成很成熟的方案。
德科智控副總經(jīng)理鄭星美提到,“車輛經(jīng)過隔離帶的顛簸感是需要反饋的,在顛簸路面行駛帶來的顛簸感應該過濾,但難題在于,如何來分辨這些顛簸呢?還有,一邊的車輪在水里造成的的手感差異也需要反饋給駕駛員,但是通過什么方法來檢測這種信息呢?有些主機廠,尤其是德系主機廠,希望路感模擬器能比較精準地傳遞需要傳遞的信息。對于我們供應商來講,現(xiàn)在很大的問題就在于哪些信息需要反饋,哪些不需要,以及如何精準地區(qū)分需要反饋的和不需要反饋的信息。現(xiàn)在主機廠也沒有給我們明確的說法,在要求不明確的時候我們就很難辦。”
方案不成熟,最終呈現(xiàn)的效果自然就不盡如人意。仍然以英菲尼迪Q50為例,有消費者指出雖然來自路中心的反饋足夠,但來自角落的反饋不足,讓人很難獲得真實的路感,相對有機械連接的情形效果差很多。
路感模擬器更多的是中間過渡產(chǎn)品,只在人機共駕階段需要。假如完全實現(xiàn)了高等級的自動駕駛,不需要人接管,那么路感模擬器就不是剛需;假如實現(xiàn)不了高等級自動駕駛,那么線控轉(zhuǎn)向系統(tǒng)能給用戶帶來的體驗提升就不算很大,當前不斷進化的電動助力轉(zhuǎn)向系統(tǒng)已經(jīng)可以比較好地實現(xiàn)轉(zhuǎn)向功能,因此,大家對線控轉(zhuǎn)向的需求并不迫切。
對過渡產(chǎn)品,廠商很難有動力投入很多資源去改進技術(shù),提升產(chǎn)品體驗。畢竟,路感模擬器的技術(shù)不算容易,研發(fā)成本不低。因此很多廠商目前都處于觀望狀態(tài),實際沒有太多投入。那么,路感模擬器距離用戶體驗有本質(zhì)提升、能讓用戶滿意,可能還需要比較長的時間。
此外,傳統(tǒng)的轉(zhuǎn)向系統(tǒng)具有自動回正功能。在有機械連接的時候,駕駛員將方向盤轉(zhuǎn)動一個角度后,不做后續(xù)操作,方向盤會自動歸位。拿掉機械連接后,方向盤若要回正就需要用電信號來模擬回正功能。
然而,目前用電信號模擬很難及時且恰到好處地讓方向盤回正,有時候方向盤會轉(zhuǎn)過頭,有機械連接的時候就不會出現(xiàn)這樣的問題。雖然現(xiàn)在有些供應商會在方向盤上增加角傳感器來檢測回正是否過量,但目前效果還不算太好,和機械連接帶動的回正在效果上仍然有差異。
回正功能不好不光是影響駕駛員體驗,嚴重的時候還會帶來一些安全性問題。據(jù)悉,英菲尼迪的Q50有一個比較嚴重的問題,在急轉(zhuǎn)彎的時候,手松開方向盤后方向盤回正很慢,假如這時駕駛員踩了油門,而方向盤還未來得及歸位,就可能會造成事故。
2.4 目前的線控轉(zhuǎn)向系統(tǒng)成本比較高
出于安全考慮,線控轉(zhuǎn)向系統(tǒng)需要配備安全冗余,方案包括全冗余和半冗余。冗余方案分為全冗余和半冗余。顧名思義,全冗余就是所有部件都做了冗余,全冗余的線控轉(zhuǎn)向系統(tǒng)有兩套傳感器、兩套電機、兩套ECU,車輛上一般還需要配備兩個電源。半冗余是指部分部件有冗余,半冗余的線控轉(zhuǎn)向系統(tǒng)有兩套電機。
從功能安全的角度講,車輛配備半冗余還是全冗余的線控轉(zhuǎn)向系統(tǒng)和自動駕駛的等級相關(guān)。對于L3級別的自動駕駛,人可以充當部分安全冗余的角色。要達到ASIL-D等級的功能安全要求,用兩套電機就可以實現(xiàn)。但對于L4級別的自動駕駛,人可以不再接管,僅用兩套電機無法達到功能安全等級的要求,因為一套系統(tǒng)壞了,還需要另一套系統(tǒng)能正常運行。此時,就需要線控轉(zhuǎn)向系統(tǒng)的每個部件都有冗余。
配備安全冗余之后,零部件增加,那么成本就會相應地增加。此外,上文提到假如線控轉(zhuǎn)向要上車測試,還需要配備路感模擬器,這也額外增加了成本。
還有一個可能增加成本的因素是,方向盤和轉(zhuǎn)向電機沒有機械連接后,可能會需要兩個ECU來分別控制,相應地成本會增加。
汽車零部件產(chǎn)品,尤其是電子類,價格和出貨量強相關(guān)。只有出貨量大,供應商才愿意給出較低的價格,因為量大才能盡可能地攤薄研發(fā)成本,以及一些固定開支。當前的線控轉(zhuǎn)向遠未達到量產(chǎn)的程度,而是處于研發(fā),小批量測試的階段,成本很難降低。
據(jù)估計,EPS系統(tǒng)價格約1000元,線控轉(zhuǎn)向的價格大概在5000-8000元。雖然未來隨著技術(shù)的進步,產(chǎn)品的推廣,成本有降低的可能,但在當前價格差距還很大的情形下,假如消費者無法感受到明顯的體驗提升而愿意買單,很少會有廠商愿意推廣。
2.5 存量市場的抵制
作為底盤線控化的一部分,線控轉(zhuǎn)向是否能“上車”不僅取決于技術(shù)、成本等因素,也受到供應商和主機廠內(nèi)部相關(guān)團隊博弈的影響。
要實現(xiàn)真正意義上的線控轉(zhuǎn)向,需要主機廠開放相關(guān)接口,因為現(xiàn)在很多整車會采用域控的方式。這部分工作需要供應商和主機廠的磨合。當然了,有些主機廠會把域控制器交給第三方代工,那么就需要供應商和第三方的磨合。
有行業(yè)專家提到,“從域控制器的角度來說,目前的存量市場和線控底盤格格不入,因為要實現(xiàn)底盤的線控化,需要主機廠開放制動、轉(zhuǎn)向等的接口。開放接口會在一定程度上削弱主機廠內(nèi)部負責底盤業(yè)務的團隊的權(quán)限,所以存量市場的利益板塊會抵制,從而制約底盤的快速發(fā)展。 ”
3. 誰有可能第一個吃螃蟹成功?
雖然線控轉(zhuǎn)向還未走到量產(chǎn)節(jié)點,但作為底盤系統(tǒng)中很重要的一部分,線控轉(zhuǎn)向也受到了很多關(guān)注。勁邦資本投資副總貢璽提到,“底盤系統(tǒng)動力學涉及到三根軸,一般稱為xyz 三根軸,轉(zhuǎn)向是解決 y 軸的問題,但很多時候 y 軸跟 x 軸包括跟 z 軸相互勾連,他們之間有動力學關(guān)系。”
貢總還提到,“底盤領域的創(chuàng)業(yè),就像是在做Tier1中的芯片Tier2。底盤技術(shù)難度不下于芯片,而且底盤和芯片都有平臺性質(zhì),和自動駕駛的場景綁定不深。底盤類公司的收入非常抗周期,因此,即使線控轉(zhuǎn)向還沒到量產(chǎn)節(jié)點,也會持續(xù)關(guān)注。”
也正因為還沒走到量產(chǎn)節(jié)點,誰會第一個吃螃蟹成功就成為了大家很關(guān)心的問題。出于技術(shù)、成本等種種考慮,很多企業(yè)對于線控轉(zhuǎn)向都是觀望的態(tài)度。那誰有可能第一個吃螃蟹成功呢?
3.1 主流供應商的進度
我們先來看看部分主流供應商在線控轉(zhuǎn)向領域的進度,如下表所示。

目前來看,日系供應商捷太格特走在最前沿。此前第一個使用線控轉(zhuǎn)向系統(tǒng)(帶機械冗余)的品牌英菲尼迪隸屬于日產(chǎn)汽車公司,搭載的轉(zhuǎn)向系統(tǒng)也是來自日系供應商日立。雖然第一款產(chǎn)品不算成功,但看起來日系公司對線控轉(zhuǎn)向很執(zhí)著,時隔8年后搭載了線控轉(zhuǎn)向的豐田bZ4X仍然來自日本。
整體上來看,日本文化是偏謹慎的,可對于線控轉(zhuǎn)向這樣在很多人看來目前不太有性價比的產(chǎn)品,為什么日系廠商會如此執(zhí)著呢?智能底盤行業(yè)專家齊佳寧告訴筆者,“日本的道路普遍較窄,駕駛員需要打方向的幅度比較大,轉(zhuǎn)向靈活能顯著提高用戶體驗。用戶需求促使廠商去研發(fā)更好用的轉(zhuǎn)向系統(tǒng)。”
那么,第一個吃螃蟹成功的有可能是日系車企嗎?有這樣的可能,因為線控轉(zhuǎn)向的成功依賴于從產(chǎn)品的角度贏得用戶。既然在日本的路況下,線控轉(zhuǎn)向給用戶帶來的體驗提升可能更為明顯,那日系車企就有更多的動力去研發(fā)線控轉(zhuǎn)向并推進上車。積攢的用戶反饋數(shù)據(jù)多,車企就更容易根據(jù)這些數(shù)據(jù)去迭代產(chǎn)品,把產(chǎn)品打磨得更成熟。
還有一種觀點認為,第一個成功量產(chǎn)線控轉(zhuǎn)向的可能出現(xiàn)在特斯拉、蔚小理這樣注重科技感的公司中。對于這樣的公司而言,汽車不僅是一個出行工具,而是智能移動終端,那么線控轉(zhuǎn)向的意義就更能凸顯。
此外,這些車企的車型相對高端,成本更高,可以轉(zhuǎn)嫁給消費者的成本也比較高,具備搭載線控轉(zhuǎn)向的條件。
去年特斯拉在Model S Plaid上配備了平底矩形方向盤。據(jù)悉,搭載此款方向盤的背景是特斯拉內(nèi)部正在自研線控轉(zhuǎn)向技術(shù),他們希望最大程度地精簡轉(zhuǎn)向的機械結(jié)構(gòu)。
另外,根據(jù)業(yè)內(nèi)人士推測,蔚來此次與采埃孚簽訂共同研發(fā)線控轉(zhuǎn)向的協(xié)議后,將可能在基于NT3.0平臺開發(fā)的車型上搭載線控轉(zhuǎn)向系統(tǒng),時間可能會是2024或者2025年。
3.2 線控轉(zhuǎn)向量產(chǎn)的時機
筆者在與各位行業(yè)專家溝通的過程中,多次聽到2025年這個節(jié)點。有一種觀點是,2025年可能是線控轉(zhuǎn)向小批量上車的一個時間節(jié)點。
為什么是2025年呢?德科智控副總經(jīng)理鄭星美這樣解釋道,“我們這個行業(yè)里的一個新技術(shù),從決定開始做,到真正能落地,怎么也得五年。可能我先花一年時間把東西做出來,然后再花兩三年時間去改進。因為涉及到新技術(shù)嘛,改進三四輪或者四五輪都是很正常的。然后再上車,上車之后還要繼續(xù)改進。那整個過程走完,可能就過去了四五年時間。2020年開始我們做線控轉(zhuǎn)向,其實你就開始看到有東西出來了,那么到真正能量產(chǎn)上車,可能就是2025年左右。”
此前主流的開發(fā)模式是,供應商端完成零部件的生產(chǎn)后,主機廠只做集成驗證。現(xiàn)在,以線控轉(zhuǎn)向為例,主機廠可能會自己設計上層的功能,例如轉(zhuǎn)向系統(tǒng)和其他自動駕駛的部件如何交互、轉(zhuǎn)向系統(tǒng)的某個部件出了故障要如何應對等。供應商只需要保證供應的零部件可以準確地執(zhí)行上層系統(tǒng)發(fā)出的指令。這意味著,線控轉(zhuǎn)向“上車”的難度降低了一些,那么,“上車”時間就更近了。
中國現(xiàn)在有世界上最大的新能源車市場,各家主機廠都在積極地“技術(shù)創(chuàng)新”,每年市場上都會出現(xiàn)很多新車型。這樣的市場環(huán)境給新技術(shù)的迭代提供了良好的條件,對于國內(nèi)的線控轉(zhuǎn)向供應商是一種利好,相信國內(nèi)的線控轉(zhuǎn)向廠商可以發(fā)揮好這一優(yōu)勢,做出令人滿意的產(chǎn)品。
實際上,如果不把眼光限定在乘用車,我們可以看到,在無人配送領域,線控轉(zhuǎn)向已經(jīng)開始上車了。目前包括美團、阿里都有搭載了線控轉(zhuǎn)向的無人配送小車在提供貨運服務,此次受訪的浙江思銳智能科技、德科智控都有相應的線控轉(zhuǎn)向產(chǎn)品出貨。如果整車成本達到合理區(qū)間,這可能是一次物流外賣業(yè)的變革。
當然,無人配送小車因為是在相對封閉的場景低速運行,安全問題更容易解決,但在與各行業(yè)專家的交流中,一個共識是在線控轉(zhuǎn)向上目前基本不存在“大家完全不知道該如何著手”的問題。對于現(xiàn)有的問題,大家知道該往哪個方向去做,然后慢慢迭代,之后就可以達到基本符合預期的效果。因此,相信在不遠的將來,線控轉(zhuǎn)向也將進入量產(chǎn)上車的階段。
來源:九章智駕 作者:張萌宇






