
眾所周知,從分布式架構(gòu)向集中式域控制器架構(gòu)演進已經(jīng)成為下一代自動駕駛系統(tǒng)不可逆轉(zhuǎn)的趨勢。對于下一代集中式域控架構(gòu)下到的自動駕駛系統(tǒng)來說,域控制器因為有強大的硬件計算能力與豐富的軟件接口支持,使得更多核心功能模塊集中于域控制器內(nèi),系統(tǒng)功能集成度大大提高,這樣對于功能的感知與執(zhí)行的硬件要求降低。但是,域控制器的出現(xiàn)并不代表底層硬件 ECU 的大規(guī)模消失,很多 ECU 的功能會被弱化(軟件和處理功能降級,執(zhí)行層面功能保留),大部分傳感器也可以直接傳輸數(shù)據(jù)給域控制器,或把數(shù)據(jù)初步處理后給域控制器,很多復(fù)雜計算都可以在域控制器里完成,甚至大部分控制功能也在域控制器里完成,原有 ECU 很多只需執(zhí)行域控制器的命令,也就是說,外圍零件只關(guān)注本身基本功能,而中央域控制器關(guān)注系統(tǒng)級功能實現(xiàn)。此外,數(shù)據(jù)交互的接口標(biāo)準(zhǔn)化,會讓這些零部件變成標(biāo)準(zhǔn)零件,從而降低這部分零部件開發(fā)/制造成本。
作為自動駕駛之眼的攝像頭尤其是這樣,在L2階段,整個智能駕駛的視覺感知單元一般都是放在被稱之為攝像頭總成的零部件中,這種總成零部件都是包含了攝像頭模組本身,也包含了處理攝像頭感知的環(huán)境信息的軟件算法模塊,比如ISP、encode、神經(jīng)網(wǎng)絡(luò)、深度學(xué)習(xí)單元等AI算法。然而,在下一代高階自動駕駛系統(tǒng)中,這些原本由攝像頭模組處理的感知能力將會被放到域控制器端的AI芯片進行集中式處理。那么,問題來了,對于這類型的自動駕駛系統(tǒng)架構(gòu)模式,攝像頭模組本身的需求將會發(fā)生哪些變化,又會帶來哪些新的需求呢?
數(shù)據(jù)和特征決定了機器學(xué)習(xí)的上限,而模型和算法只是逼近這個上限而已。
一 攝像頭模組基本原理
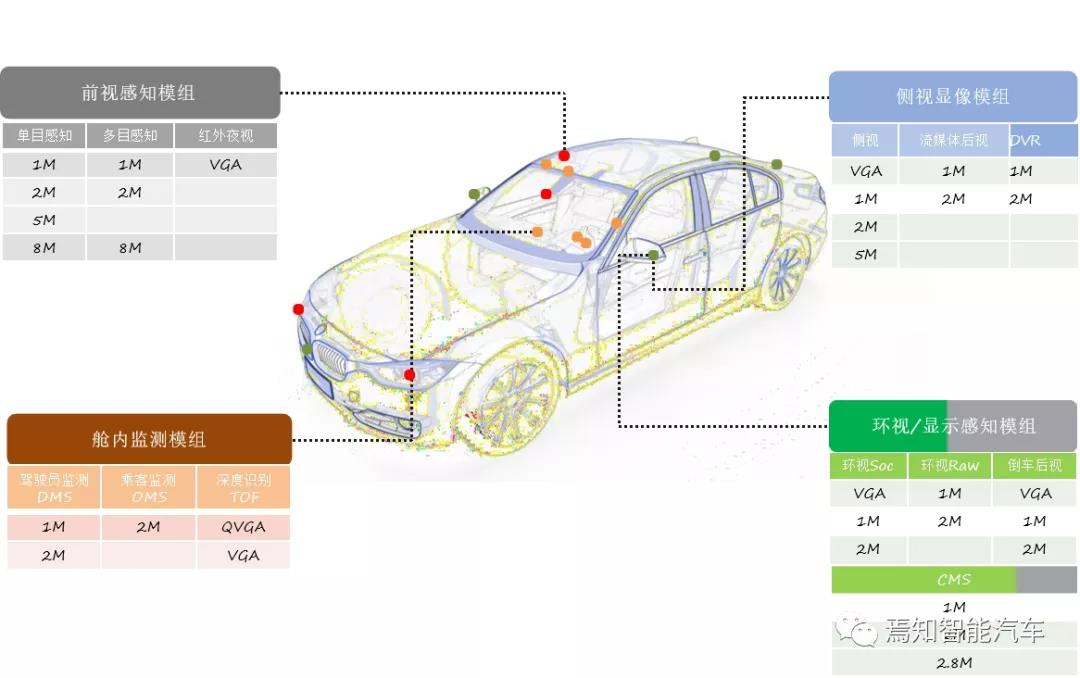
整個車載攝像頭模組分為幾個不同的較大模塊,按照布置的不同區(qū)域以及實現(xiàn)的不同的功能,整個攝像頭模組分為前視感知模組、艙內(nèi)監(jiān)測模組、顯像感知模組、外攝顯像模組。
1、攝像頭功能類型
對于高階自動駕駛系統(tǒng)而言,以前視感知系統(tǒng)為例,從攝像頭的類型分類總體可以分為:包含針對更加強悍的遠(yuǎn)距離小目標(biāo)類型、結(jié)構(gòu)探測的單目感知模組;對距離、速度等深度信息更為敏感的雙目感知模組;以及對夜間行駛下目標(biāo)的紅外信息更加有效的夜視攝像頭模組。如下圖分別表示了幾種攝像頭的不同探測功能性能。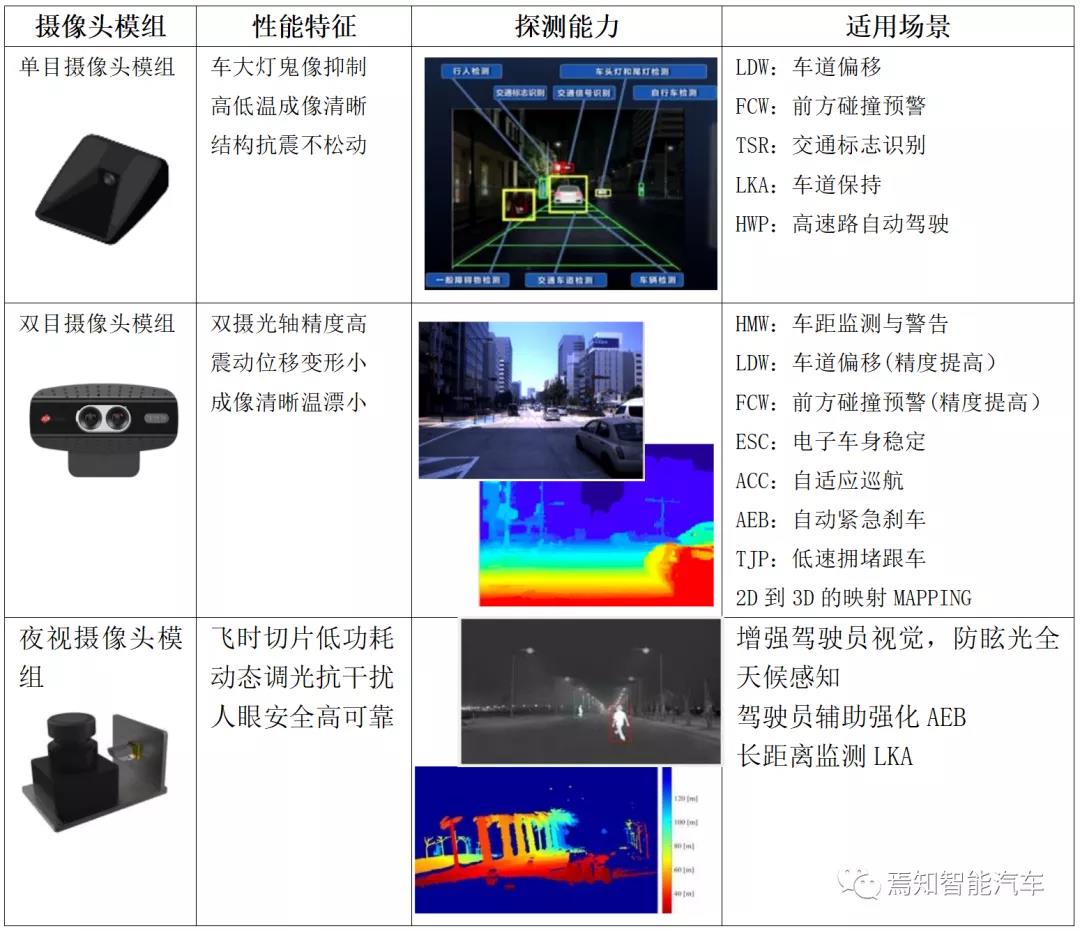
2、攝像頭模組類型
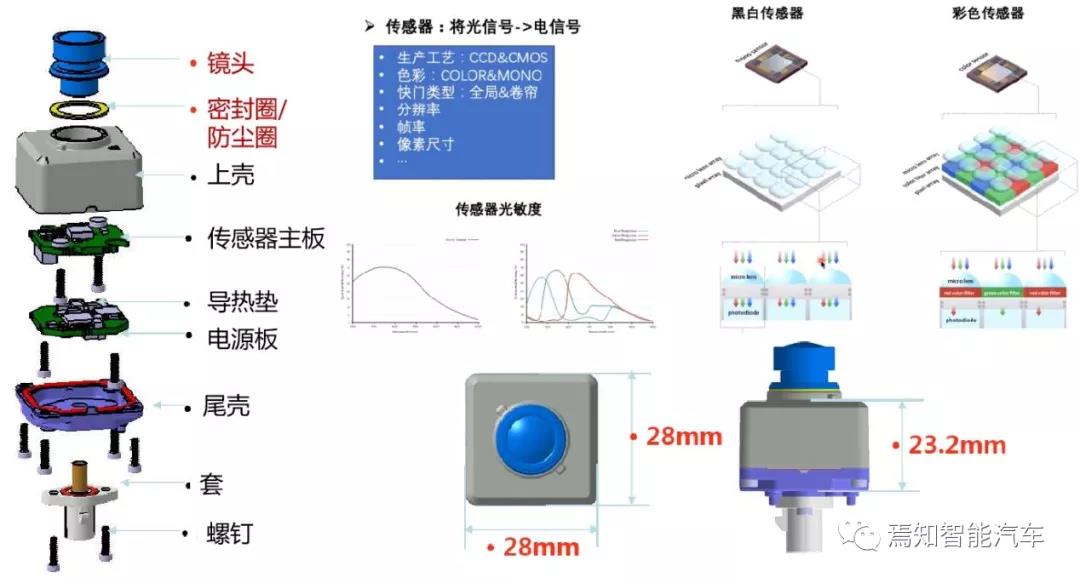
從攝像頭的結(jié)構(gòu)來看,主要包含鏡頭、基座、紅外濾光片、圖像傳感器、PCB和FPC,其中對成像質(zhì)量影響最大的兩個為圖像傳感器和鏡頭。圖像傳感器是將光信號轉(zhuǎn)化為電信號的裝置,是攝像頭中最為重要的部件,分為CCD和CMOS兩大類。CMOS圖像傳感器芯片采用了CMOS工藝,可將圖像采集單元和信號處理單元集成到同一塊芯片上。其工作原理是將光敏元陣列、圖像信號放大器、信號讀取電路、模數(shù)轉(zhuǎn)換電路、圖像信號處理器及控制器集成在一塊芯片上。雖然成像質(zhì)量不如CCD,但是CMOS因為耗電省(僅為CCD芯片的1/10左右)、體積小、重量輕、集成度高、價格低迅速得到各大廠商的青睞。目前主流的車載攝像頭都采用CMOS圖像傳感器芯片。
從攝像頭應(yīng)用于不同的探測功能來說,可以區(qū)分為前視、側(cè)視、后視攝像頭、艙內(nèi)攝像頭等。

3、攝像頭檢測原理
實際上,在進入真正的圖像處理算法前,進入圖像攝像頭模組的圖像就已經(jīng)在攝像頭模組的半導(dǎo)體合成芯片處理端被進行了初步的數(shù)字信號處理(ISP)處理。這個過程包含原始數(shù)據(jù)處理過程(如壞點矯正、黑電平矯正)、顏色處理過程(白平衡、去躁、去馬賽克、GAMMA等)。其中常見的3A數(shù)字成像技術(shù)利用了AF自動對焦算法、AE自動曝光算法及AWB自動白平衡算法,實現(xiàn)了圖像對比度最大、改善主體拍攝物過曝光或曝光不足情況、使畫面在不同光線照射下的色差得到補償,從而呈現(xiàn)較高畫質(zhì)的圖像信息,很好的保障圖像精準(zhǔn)的色彩還原度,呈現(xiàn)完美的日夜監(jiān)控效果。另一種采用的寬動態(tài)范圍HDR技術(shù)則是在非常強烈的對比下讓攝像機看到影像的特色而運用的一種技術(shù)。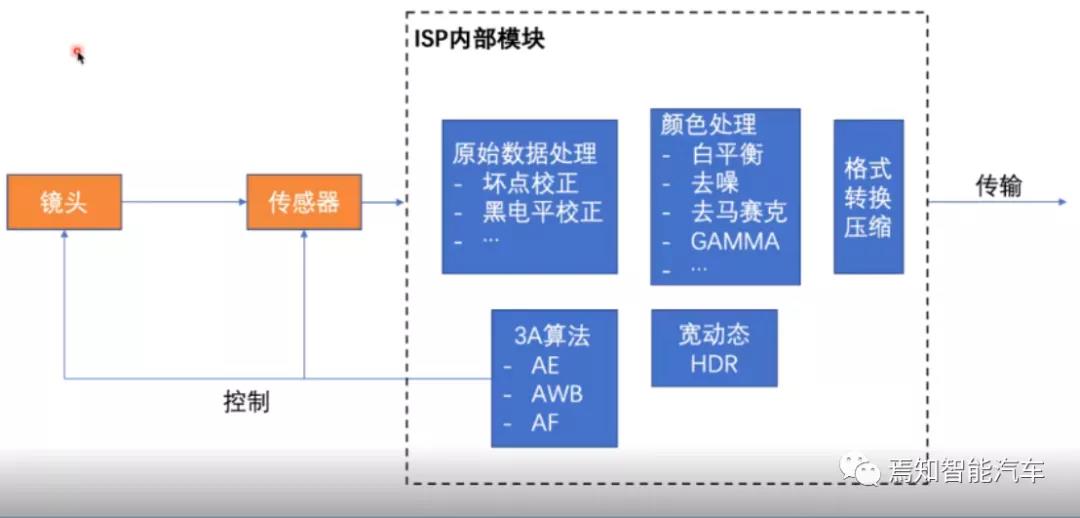
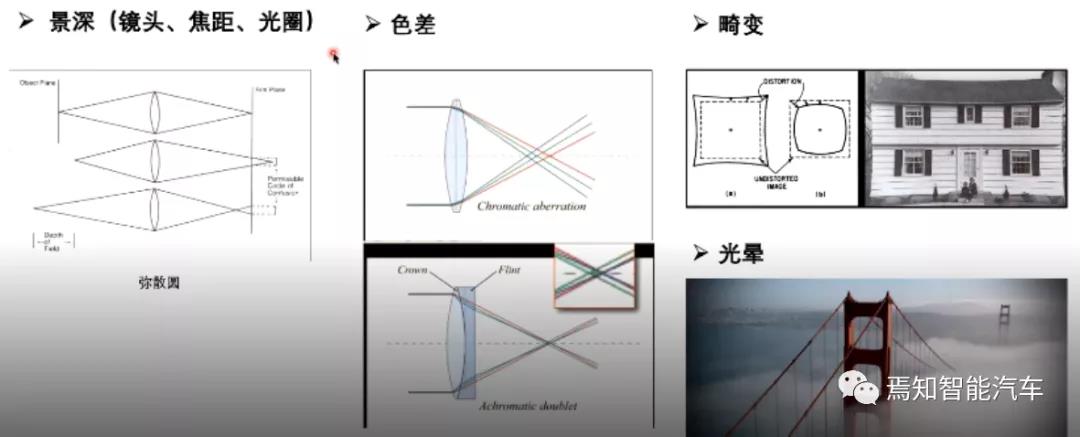
二 攝像頭成像性能指標(biāo)
攝像頭成像性能會大大影響后續(xù)AI芯片對環(huán)境的認(rèn)知,特別是其深度學(xué)習(xí)算法、算力都是強項關(guān)與攝像頭模組輸入的原始數(shù)據(jù)。原始數(shù)據(jù)中的圖像大小、分辨率、視野范圍、像素大小、動態(tài)范圍、幀率等要素則是影響的主要因素。
整體上,對于攝像頭模組而言,主要關(guān)心的指標(biāo)主要有以下幾個:
1、成像單元
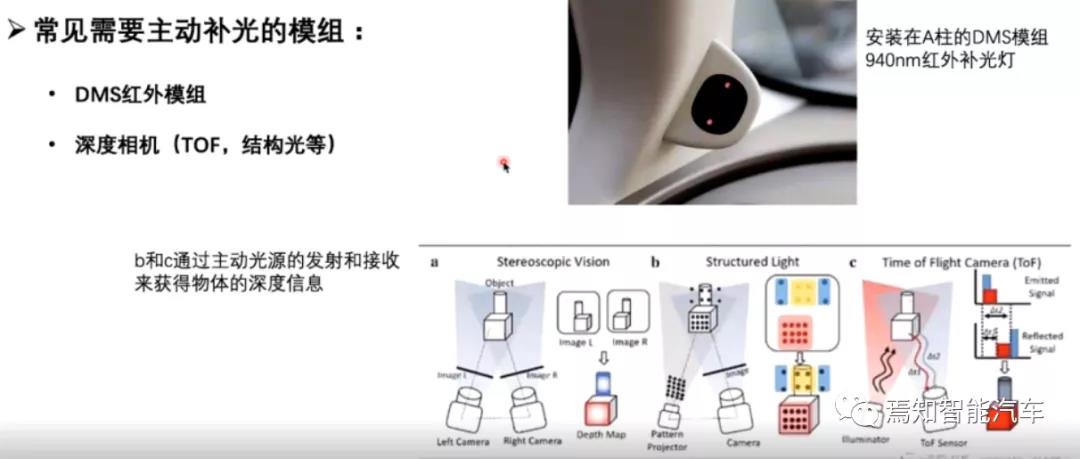
以主機廠主要應(yīng)用的CMOS攝像頭成像元件為例,這種圖像傳感器是將光敏元陣列、圖像信號放大器、信號讀取電路、模數(shù)轉(zhuǎn)換電路、圖像信號處理器及控制器集成在一塊芯片上。在CMOS芯片中,每個像素都有各自的信號放大器,各自進行電荷-電壓轉(zhuǎn)換,為了讀出整副圖像信號,要求輸出放大器的信號帶寬較寬,每個像元放大器的帶寬較低,大大降低了芯片功耗。影響成像效果的因素包含主觀和客觀兩種,主觀因素是指環(huán)境動態(tài)目標(biāo)實際的反射光線能力。如照明度低的隧道或陰雨霧天都是客觀降低成像質(zhì)量的要素,針對客觀因素導(dǎo)致的圖像成像低質(zhì)量往往需要采用主動補光(一般包括DMS攝像頭、TOF攝像頭)或色彩補償?shù)姆绞竭M行質(zhì)量提升;而主觀因素則是針對攝像頭模組本身的,比如信噪比、解析度、寬動態(tài)、灰階、色彩還原度等等。
2、集成性
對于攝像頭模組而言,考慮到其處理能力需要面向更多的原始場景要求,需要集成信號放大器你、信號讀取電路、AD轉(zhuǎn)換電路、圖像信號處理器及控制器等在一塊芯片上。將在前端模組中實現(xiàn)芯片級照相機的功能。
3、采集速度
攝像頭模組需要逐個對光敏元件進行輸出,且具備多個電荷-電壓轉(zhuǎn)換器和行列開關(guān)控制,讀出速度基本大于500f/s以上。且對于高分辨率的攝像頭模組而言,往往需要下采樣后進行子窗口的輸出,在僅輸出子窗口圖像時可以獲得更高的速度。比如當(dāng)前應(yīng)用比較廣泛的是利用地平線的J3芯片處理800萬像素的圖像就需要進行下采樣后,直接輸入加串器后才能滿足J3的處理能力。
4、噪聲處理
當(dāng)前各家攝像頭供應(yīng)商更傾向于CMOS工藝下的攝像頭模組,這類模組往往由于缺少PN結(jié)或二氧化硅隔離層,無法實現(xiàn)對噪聲的有效隔離。各元件、電路之間距離很近,干擾比較嚴(yán)重。在這一塊上,對于前段模組的消噪技術(shù)提出了比較高的要求。5、耗電量
原來的攝像頭總成往往由于其布置位置是在前擋風(fēng)玻璃,且其本身集成的AI芯片會大量調(diào)用深度學(xué)習(xí)算法進行大量的運算。因此,其耗電量也是十分巨大的。當(dāng)下一代自動駕駛系統(tǒng)架構(gòu)中,攝像頭僅僅擔(dān)任原始圖像識別的功能,作為模組而言,可以減少計算單元對其耗電單元的消費。三 攝像頭外圍接口
對于以集中式域控制器架構(gòu)設(shè)計的自動駕駛控制系統(tǒng)來說,攝像頭輸入的接口數(shù)據(jù)將不再是之前可以直接用于算法控制的CAN數(shù)據(jù),而是原始的圖像數(shù)據(jù),常用的攝像頭rawdata輸入接口形式包括FPD LINK III、MIPI、DVP。其中FPD-Link是第一次對LVDS規(guī)范的應(yīng)用,由于FPD-Link是第一次對LVDS的成功使用,許多顯示工程師LVDS術(shù)語來代替FPD-Link。LVDS也是攝像頭圖像傳輸?shù)闹饕绞剑鳰IPI-CSI-2(camera serial interface)協(xié)議是MIPI聯(lián)盟協(xié)議的子協(xié)議,應(yīng)用非常廣泛,具有高速,低功耗的特點。是專門針對LVDS這一傳輸介質(zhì)配置的一種傳輸協(xié)議。
對于整個自動駕駛系統(tǒng)而言每上一套新的模組就需要進行環(huán)境適配。適配流程如下:
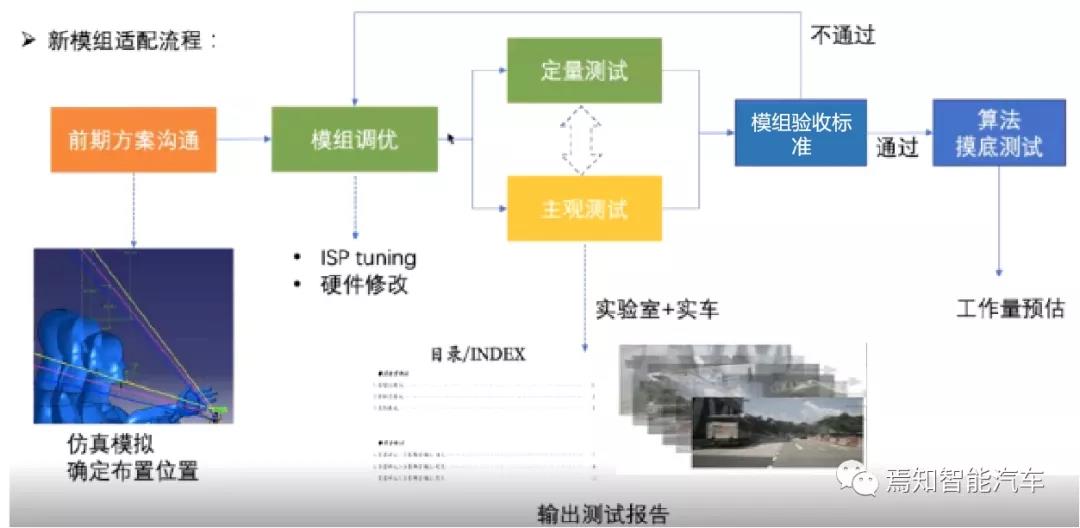
以車型外CAS為載體利用CATIA、CAD等軟件建立仿真模擬確定布置位置,釋放相應(yīng)的位置信息給攝像頭模組供應(yīng)商,攝像頭模組供應(yīng)商進行模組調(diào)優(yōu)、ISP tuning、硬件修改,隨后進行主觀測試、客觀測試。通過行業(yè)或企業(yè)內(nèi)制定的模組標(biāo)準(zhǔn)確定該模組調(diào)優(yōu)結(jié)果是否通過,通過調(diào)優(yōu)的模組可以進一步進行算法摸底測試了。攝像頭模組選擇是否合理,以最終的模組合格性測試報告為準(zhǔn)。
四 總結(jié)
綜合以上情況可知,影響攝像頭模組識別性能的要素包括模組性能、布置位置、探測環(huán)境光線等,當(dāng)然采用圖像調(diào)優(yōu)可以部分解決以上問題所帶來的影響,后期也可以通過標(biāo)準(zhǔn)化引導(dǎo)生成主觀及客觀測試標(biāo)準(zhǔn),優(yōu)化算法需求,集成到產(chǎn)品要求中。
來源: 焉知智能汽車 作者 | Aimme






