
導讀:2022北京車展延后,但不影響理想L9的花式發布劇透——這一波L9通過官方劇透的模式展示了不少的內容。我想就座艙和自動駕駛兩塊內容做一些梳理。當然等寫完以后,我想花些時間找一些資料來把整個EE架構再單獨拎出來看看,其實目前軟硬件都是圍繞核心來做的,主要是軟件層面的功能打通,這對于新勢力的管理層級來說沒難度,所以也就不是大事。
一、座艙的迭代
理想在座艙領域還是玩得很明白:一開始理想One 2020就以大屏為賣點,配合Linux和安卓系統,這個氣勢壓住了不少消費者。

▲圖1.理想One的三屏
大屏對于系統的響應速度和特性有要求,但是從TI的Jacinto切換到地平線的產品,對于整體座艙的升級差異不大,高通的820A還是決定了整體最終的體驗效果。

▲圖2.理想One 2020-2021的芯片迭代
理想L9座艙內的屏幕包括了車輛中控屏、副駕娛樂屏、后艙娛樂屏(這三塊是15.7英寸OLED屏)。對比之前是舍棄了儀表盤(這個HUD效果好)和車控屏(這玩意本來沒啥用),駕駛信息將通過HUD 和中控屏來獲取。座艙域控制器采用兩顆高通驍龍8155芯片(24GB內存和256GB高速存儲)組成計算平臺,支持雙5G運營商的切換。為了語音交互,通過6顆麥克風來提升語音交互能力,通過3DToF傳感器進行手勢識別。
吸頂屏幕這玩意之前BMW剛做過,而且一般用于MPV的配置,有點坐飛機看電影的感覺,這個屏幕加深了“奶爸車”的形象,也有點商務用途在里面了。

▲圖3.理想L9的座艙
值得提及的是這個中央域控制器,使用恩智浦最新的S32G車規級芯片(應該是G2),由理想完成軟硬件開發,按照目前的情況是集成了VCU的功能(對增程電動系統、空調系統、底盤系統和座椅控制系統)等在內的功能實現全自研,當然這個估計也能當網關使用。
備注:三電和充電的相關功能還沒納入到里面去。

▲圖4.理想的中央域控制器
二、自動駕駛的迭代
自動輔助駕駛功能,也是之前三家新勢力全力在比拼的。之前的次序是小鵬、蔚來和理想,所以擴充了自動駕駛團隊的理想這次要大力宣傳全自研的智能駕駛系統理想AD Max。這套AD Max智能駕駛系統,采用全棧自研的感知、決策、規劃和控制軟件,AEB自動緊急制動功能。
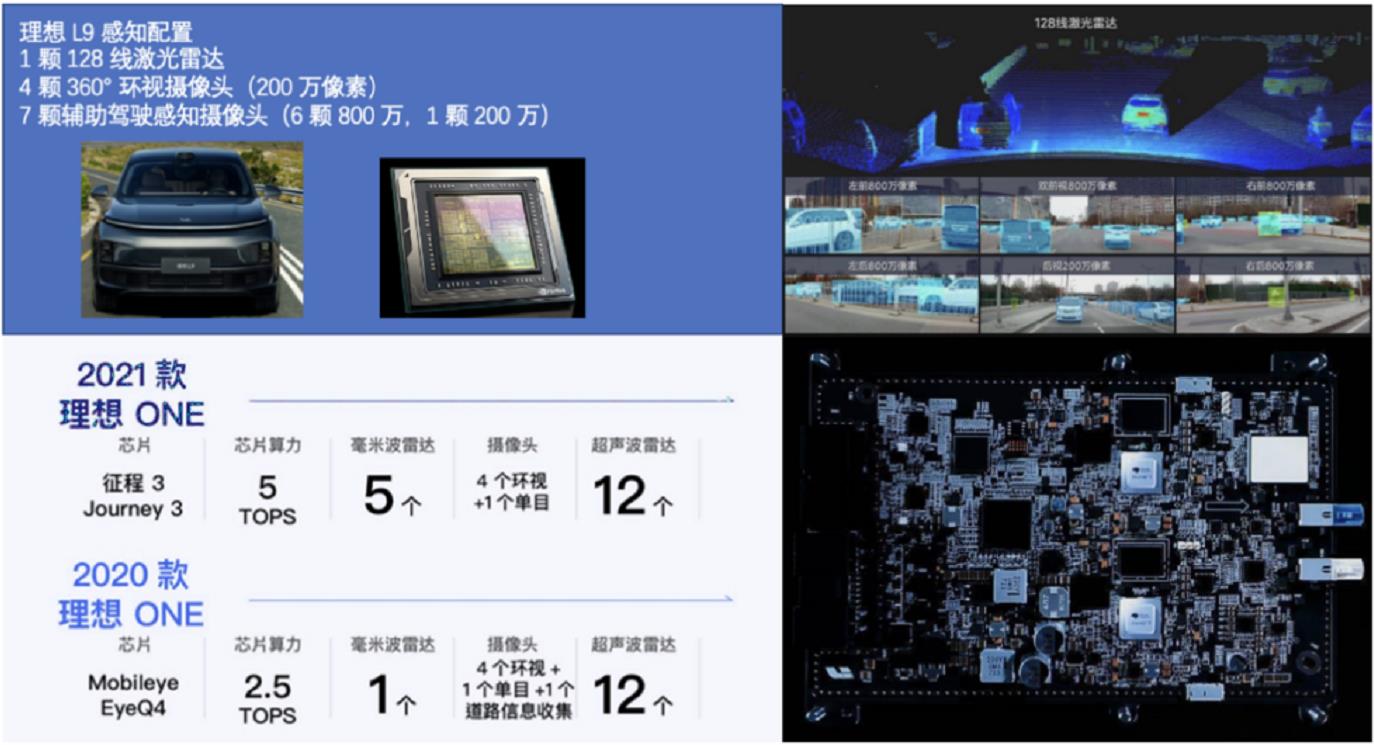
▲圖5.理想的自動駕駛硬件配置迭代
1、感知的配置
感知來看,和特斯拉采用高性能攝像頭作為主要感知來源,包括6顆800萬像素攝像頭和5顆200萬像素攝像頭,對車身周圍及遠距離的360全方位感知。
正前方的兩顆800萬像素攝像頭組合,可實現對120廣角范圍及最遠550米內車輛、行人及錐桶等物體的識別。需要注意的是,這次一下子和特斯拉一樣干掉了五個毫米波雷達(前向雷達和四個角雷達),這基本又回到了2020理想One的狀態,但是和特斯拉一樣跨越式的用視覺+算力來堆出來效果。
備注:在理想One,2021到2020款迭代中也做了理感知系統的改進,前置攝像頭性能參數提升從單目攝像頭為130萬像素,水平視角52°;升級成為800萬像素,水平視角120°,這個基本是繼承的關系。
和特斯拉不一樣的地方:前向的車規級激光雷達配備128個激光器,全局分辨率為1200x128,點云數量達到153萬/秒,在暗光、強光等攝像頭受限的場景,激光雷達可以確保系統對環境感知的準確性,并幫助車輛提升對靜止及異形障礙物的識別;例如:高速公路上的事故靜止車輛、施工路障等物體等,提升安全性。處理器方面算力平臺包含兩顆。
2、自動駕駛的配置
英偉達Orin-X處理器,總算力達到508Tops,雙處理器互為算力冗余。從旗艦版本的角度來看,價位提升的理想L9,是要把自己的自動輔助駕駛能力提升(三家新勢力的感知配置和算力配置基本差不多),實現全場景的導航輔助駕駛功能。
從劇透來看,這次沒有渲染出自動駕駛域控制器,不過有點像從之前的地平線升級到Orin的概念。

▲圖6.三家差異最大是激光雷達供應商
三、小結
現在的車型,從硬件來看差異會越來越小,而車型可能進入軟件比拼時代——這意味著大多數車企都在加快開發節奏,同時快速把硬件提升上去。在百人會上,小鵬說自己在智能駕駛領先不少,但是隨著硬件的拉平,后續看軟件和數據的積累,真的不好說差距有多大。
作者:汽車電子設計 朱玉龍






