
導讀:前不久,廣汽埃安宣布,將在其智能汽車上使用紅外線智駕傳感技術,帶來更好的智駕感知方案。本文重點討論幾個問題:廣汽埃安宣稱的紅外技術到底是什么?它的技術原理是什么?它有什么優勢?能給汽車行業帶來什么?又面臨哪些挑戰?

按照官方說法,“埃安全球首創將紅外線智駕傳感技術應用于智能駕駛,相當于給車輛添加了一雙‘響尾蛇’眼睛,為行業提升智駕安全開辟了一條新路徑。”
名頭聽起來挺唬人,但國內消費者對“全球首創、國際領先”之類的形容詞早已司空見慣。畢竟這在國內車企的宣傳資料中并不少見。
拋開這些花里胡哨的形容詞,本文重點討論幾個問題:廣汽埃安宣稱的紅外技術到底是什么?它的技術原理是什么?它有什么優勢?能給汽車行業帶來什么?又面臨哪些挑戰?

在此之前,我們先來了解一下目前的傳感器都是如何獲取信息的?
一、可見光成像原理
目前的輔助駕駛汽車使用的傳感器,不管雷達還是攝像頭,都是基于可見光來獲取信息的。可見光成像技術主要依賴可見光傳感器接收物體反射的光線(攝像頭)或其自身發出的光線(激光雷達,毫米波雷達),然后把接收到的光信號轉化成電信號,再將電信號通過圖像處理技術轉化為圖像,供決策層使用。
可見光圖像主要有以下幾個方面特征:
1、對比度較高:可見光圖像可以反映圖像色彩的差異,立體感強,色彩分明。
2、對光照條件的依賴性較強:可見光非常依賴光照,當環境的能見度低或目標被遮擋時,可見光成像系統將無法有效地從背景中發現目標物體。
因此,在霧霾、雨雪等惡劣天氣條件下,可見光圖像往往出現亮度低、細節信息不清晰以及顏色偏移等質量下降的問題。因為,大氣中存在許多的細小“顆粒”,這些“顆粒”對于光線的能量有著較強的吸收,影響可見光成像。
3、提供的信息豐富:可見光成像原理與人眼類似,都是被動接收可見光波長的光反射,因此圖像中包括所有可見光可反映的信息。
可見光圖像是在可見光條件下完成的信息采集。那也就意味著,在不可見光情況下,它的工作效率會非常差,比如黑夜,或者隧道等場景。此外,可見光波長較短,穿透能力較弱,容易受到天氣條件的影響。
自動駕駛需要全場景,全視野的環境感知。正因如此,人們開始引入能夠彌補可見光不足的技術:紅外技術。
二、紅外技術成像原理
紅外成像技術依靠成像系統獲取物體自身熱輻射強度,以及物體反射的熱輻射強度來進行成像。物體內部的分子和原子始終處于運動狀態,其運動的強度決定了物體向外發出紅外輻射的強度。
紅外成像系統通過紅外傳感器獲取物體的紅外輻射能量,并將其轉化為電壓差,接著通過模數轉換電路,將電壓差轉化為計算機可識別的數字信號,然后通過數字圖像處理技術將數字信號轉化為圖像,最終將可被人眼識別的圖像顯示在顯示器上,過程如下:
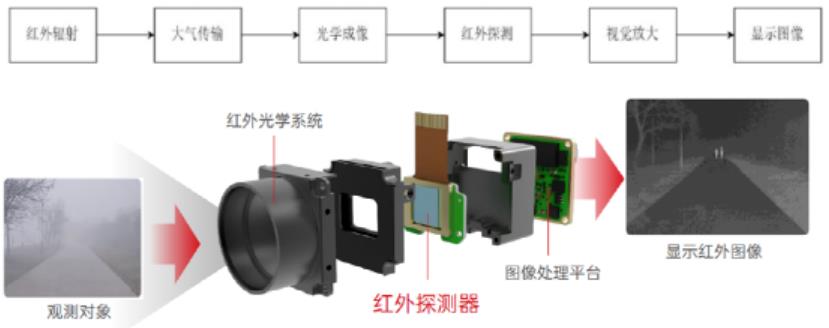
圖形采用人眼能夠分辨的灰度圖呈現,灰度值與熱輻射強度成正相關,即熱輻射強度越大,灰度值越大,圖像越清晰。
相較可見光成像,紅外技術成像有4個非常明顯的優勢:
1、對生命體具有更好的識別能力
因為紅外利用熱輻射成像,任何高于絕對零度(-273℃)的生命體都會散發熱量,所以能夠呈現更清晰的圖像。它彌補了“雷達+攝像頭”依賴形狀識別的不足,更好地保護行人和小動物。如下圖:

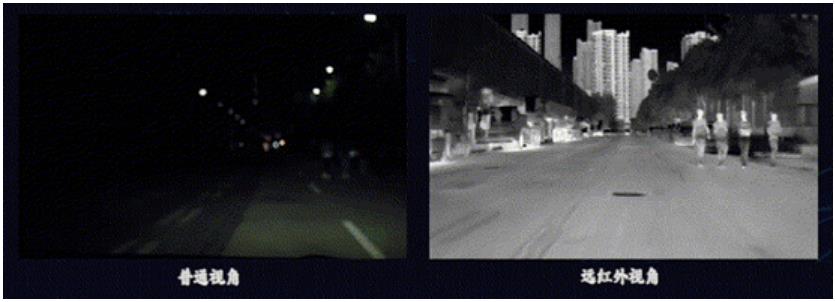
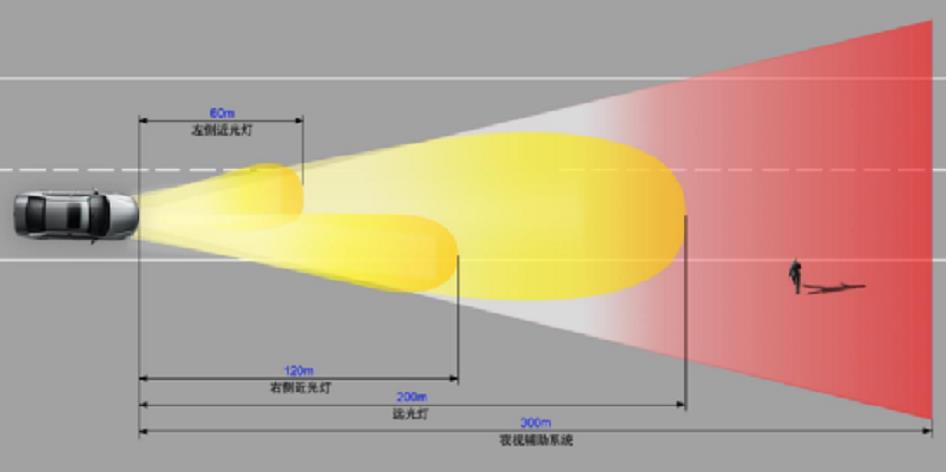
2、夜間成像能力強
上文提到,因為紅外技術是通過物體發出的熱輻射來成像,并不依賴光成像,所以不管白天黑夜,它都能工作,可以彌補可見光成像夜間探測能力差的弊端。如下圖:
3、雨霧等惡劣天氣下,抗干擾能力強
因為紅外輻射波的波長較長,所以其穿透力更好,因此即便是在沙塵、霧霾等惡劣的天氣條件下,紅外圖像的成像效果依舊比較好,即紅外圖像的抗干擾能力較強。如下圖:

4、無懼眩光
紅外只接收中長波信息,不接收可見光波段信息,夜晚會車等強弱光交替場景仍能清晰成像,感知功能不會受到影響。這也是夜間使用比較常見的一個場景,如下圖:

這里需要強調的是,紅外技術并不是指的某個特定的實物,而是一種技術手段,通過它制成的物體有很多,比如紅外探測儀,紅外攝像頭,紅外激光雷達等。好像小麥是一種農作物統稱,但它可以制成面包,方便面、漢堡等各種食物。
三、紅外技術應用廣泛
正是基于這樣的技術特性,讓紅外技術有了非常廣泛的應用。比如在航天、軍工領域,詹姆斯韋伯太空望遠鏡就通過紅外波段,研究宇宙中超大質量黑洞和各種星系的特征。
軍工領域的“響尾蛇”紅外制導導彈,就是通過紅外線技術實施制導,精準打擊目標。

在國家地理科考領域,也能看到紅外技術的身影。紅外相機是研究野生動物的一項先進的技術手段,動物學家通過它能在不打擾野生動物的情況下,捕捉到珍惜野生動物的影像。另外,紅外望遠鏡也是科考人員最常用到的,不論是白天還是黑夜,都能清晰發現隱藏在茂密山林中的各種動物。

具體到汽車行業,紅外技術也有非常廣泛的應用。比如在整車層面,紅外技術可以幫助車輛實現360°實時監測車外環境;在ADAS層面,幫助車輛進行車外感知融合;在輔助駕駛層面,與車輛的AEB功能融合,帶來更好的主動制動效果;在車輛內部,駕駛員疲勞檢測,身份識別等。
在時間上,紅外技術早已經是汽車技術發展領域的“老兵”,并非近幾年才“上車”。
早在2000年,凱迪拉克DeVille(帝威)車型的夜視系統就用到了紅外技術。之后的2005年,2008年,寶馬7系及改進成型也先后將紅外技術帶上車。
就近幾年,紅外技術在汽車AEB上得到了非常普遍的使用,因為夜間識別能力更好,且可以對不同膚色的人無差別識別。紅外技術能夠讓車輛的AEB功能更加完善。
在智能座艙領域,紅外技術也有非常廣泛的應用。比如2020年12月,Zoox發布首款純電動無人駕駛汽車,搭載了紅外攝像頭和紅外探測儀,能夠同時滿足攝像和測距的功能。
2021年,滴滴Robotaxi在上海車展上發布了與沃爾沃共同打造的“滴滴雙子星”,其搭載了一個紅外相機,探測距離超過100米。
所以,埃安宣傳的“全球首創”,它姑妄言之,我們姑妄聽之就好,不必較真。如果非要糾結這個“全球第一”,那就加兩個前提條件:第一是主機廠,第二是智能駕駛。
四、紅外技術也有弊端
當然,如同人總有優缺點一樣,任何一項技術也并非全是優點,紅外技術也并非全是優點,否則早就大規模普及了。
目前看來,紅外成像技術存在4點不足:
1、由于紅外技術是熱成像原理,所以紅外圖像只有亮度信息,沒有色彩信息,其圖像邊緣模糊,細節不清晰。可見光圖像就不存在這樣的情況,其紋理細節信息豐富,圖像邊緣清晰。
這會造成什么結果?如果一個與猴子等高的人和猴子同時站在馬路中間(猴子保持站立),紅外成像可能無法分辨誰是猴子誰是人。對結果造成誤判。
2、受到紅外圖像的成像原理限制,溫差不大的物體之間熱輻射值也類似,反映到圖像中即是背景信息灰度值區別不大,造成紅外圖像對比度較低。
這會造成什么后果呢?比如兩個人并排站在一起,二者的身體輪廓非常模糊,幾乎很難分辨。
3、由于紅外探測器陣列數少,探測單元的的體積受限,因此紅外圖像分辨率比較低。
4、由于紅外技術在工作過程中,存在各種噪聲(可見光成像也存在這個問題)。
所以紅外成像的信躁比特別低。(信噪比為信號與噪音的比值,數值越高,說明信號受噪音的影響越小。)
這會造成什么問題?圖像模糊,呈現的噪點特別多。
業內常用的辦法是對其進行圖像預處理,給圖像去躁(類似攝像頭ISP的功能)。用到的算法是中值濾波算法。
五、紅外技術上車也存在技術挑戰
由于紅外和可見光成像各有優劣,而且可見光已經可以完成大部分信息感知工作。所以紅外技術更多的是可見光場景外的一種感知補充。
根據埃安介紹,其提供的是“雷達+攝像頭+紅外技術”的全感知方案,所以就需要牽扯到信息融合的問題。
它們的圖像融合主要包含3個層面,分別是像素級融合,特征級融合,決策級融合。三者是層層遞進的關系,三層次的融合方式對比如下圖:
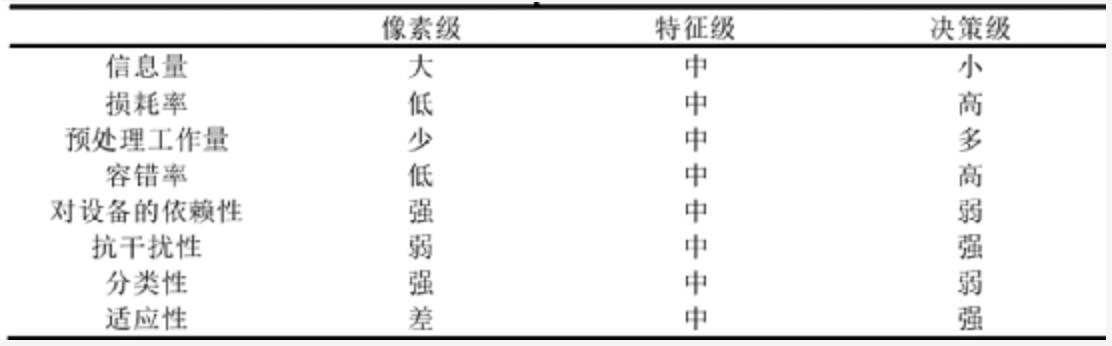
1、像素級圖像融合是直接對不同傳感器獲取的兩幅或多幅圖像中對應坐標的像素點的值進行融合,使得真實圖像的信息丟失少,保留程度好,有利于接下來的目標檢測,識別過程。
這里有兩點需要強調:首先,由于融合過程中需要處理較大的信息量,該融合對硬件設備要求相對于另外兩種融合級別更高;其次,像素級融合的容錯能力相對較差,在進行融合前,需要對圖像進行預處理。
2、特征級融合是中間層次的圖像融合技術,其核心思想是分析各個圖像中目標
物體特征的似然率(相似度),并將其進行綜合處理。如紋理、形狀、角、點等特征,使之形成一幅質量更好的圖像。
3、決策級圖像融合是圖像融合中最高層次的融合,首先要對原圖像進行抽象,然后通過模擬人的分析、推理、決策過程對圖像進行融合。決策級融合保留了較少的源圖像內容,但可推廣性較好、應極端情況的能力較強,即使一個或多個傳感器同時損壞,或是各個圖像間數據表現形式差異較大,都不影響其做出正確的判斷。
三層融合都牽扯到復雜的算法模型,大量的數據積累、模型標注等等。非常考驗廠商的技術積累。
總的來說,紅外技術是個好東西,但是要用好才是本事。就好像大家都喜歡吃海鮮,鮑魚,但并不是每個廚子都能把它做出鮮美的味道,也可能搞砸了,滿是腥味。智能駕駛感知上,埃安的表現到底如何,等實車出來之后再看吧。
作者:圓周智行






