
導讀:Cruise到底是誰?他的技術有什么優勢?等等一系列問題。本文將進行詳細解讀,如有不妥,還請讀者朋友們多多指點。
今天我找到相關視頻以及資料,從以下3個方面進行分析,希望給大家一個全面的認識,也希望能給自動駕駛行業人員一些思考或者啟發,Cruise確實比較有意思。
1、誰是Cruise?自動駕駛方案是怎么樣的?
2、Cruise自動駕駛技術;
- Cruise 感知算法
- Cruise 決策算法
- Cruise 的自動駕駛元宇宙驗證開發
- Cruise的自動駕駛工具鏈以及流程
3、Cruise 未來方向;
一、誰是Cruise
Cruise 是Kyle Vogt和Dan kan于2013年在美國舊金山聯合創辦,剛開始其實目標是開發自動駕駛高速自動駕駛套件RP-1然后推廣到更多量產車上(這個場景我之前文章自動駕駛的先啟之地-物流運輸行業講過),剛開始成功讓奧迪A4和S4擁有高速自動駕駛功能。之后他們進軍城市自動駕駛。隨后就是2016被通用汽車看上了。
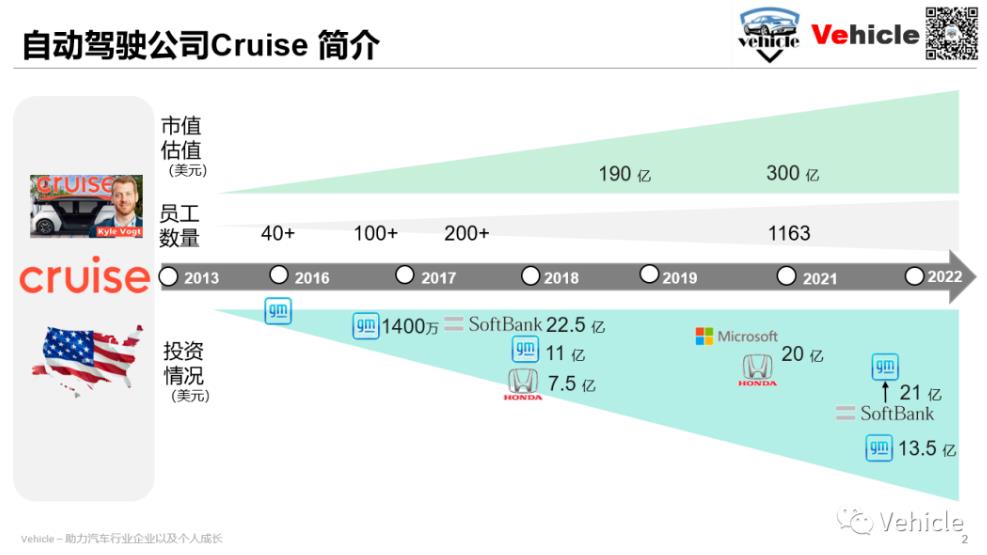
一路看來,基本上算通用汽車慧眼,或者通用汽車資本的助推,后來本田,軟銀,微軟的加入,直接把市值現在推上了300億美金。在2022年通用21億購買了軟銀的股份,所以現在基本就是通用和本田絕對大股東,通用甚至在人事和資金上絕對主導。
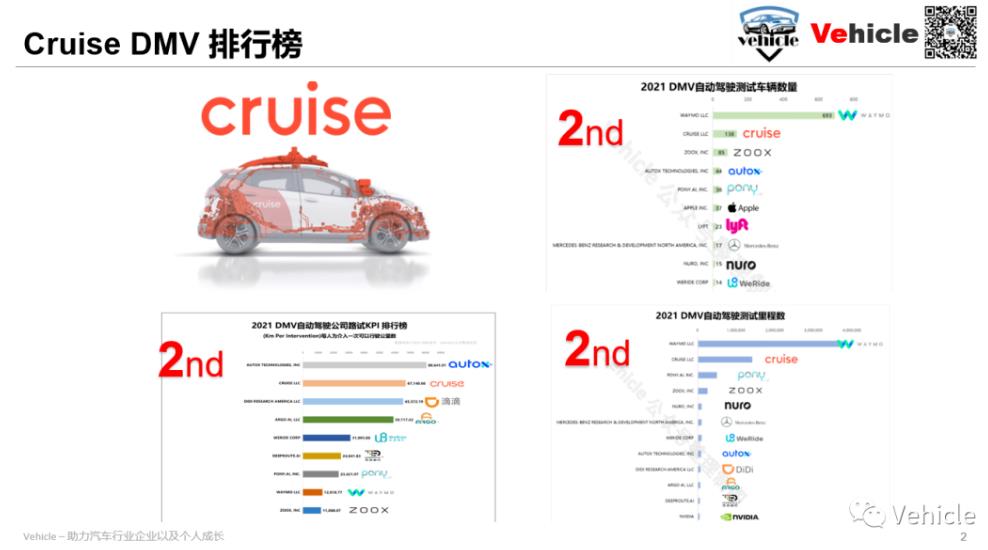
所以現在Cruise在路上跑的測試車都來自于通用電動車bolt,技術方案是多種傳感器冗余(5個激光雷達,14個攝像頭,3個廣角雷達,8個長距雷達,10個超聲波)+高精地圖+AI處理器。

顯然從傳感器的種類和數量,這些放到中國來和新勢力的堆料拼參數有的一比(了解中國新勢力傳感器數量和種類可以點擊視覺為王-小鵬以及特斯拉的自動駕駛方案)。5個激光雷達也只有通過廣州車展-看自動駕駛激光雷達文中提到的長城機甲龍最多才4個,11個毫米波雷達,這種推料和拼參數的表現連中國新勢力都無人能比,所以Cruise表示接下來其自動駕駛工作重點是:
- 減少以及融合各種傳感器,以降低成本。
- 減少對于高精地圖的依賴,甚至未來和特斯拉方案一樣不使用。
- 為算法以及虛擬驗證,設計通用的工具以及流程,使自動駕駛開發迅速高效容易規模化。
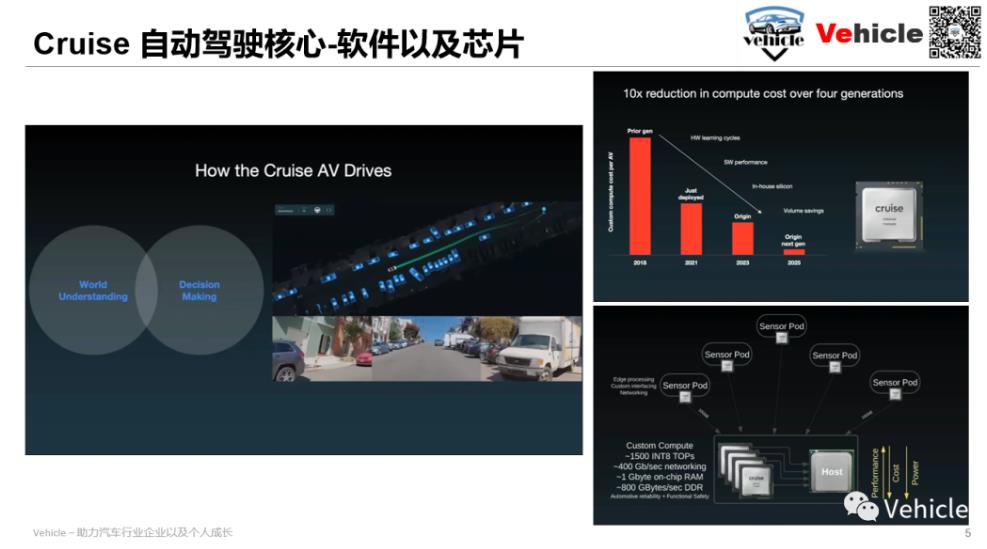
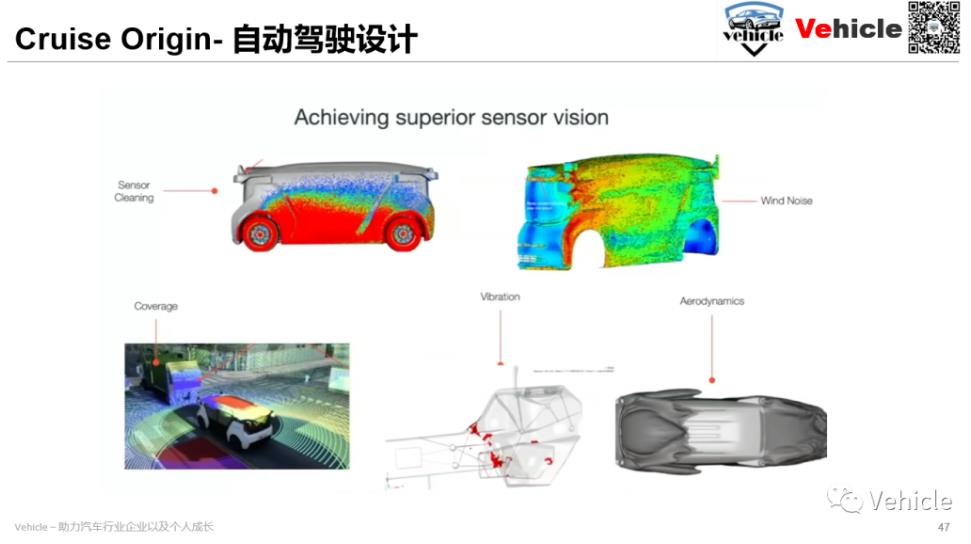
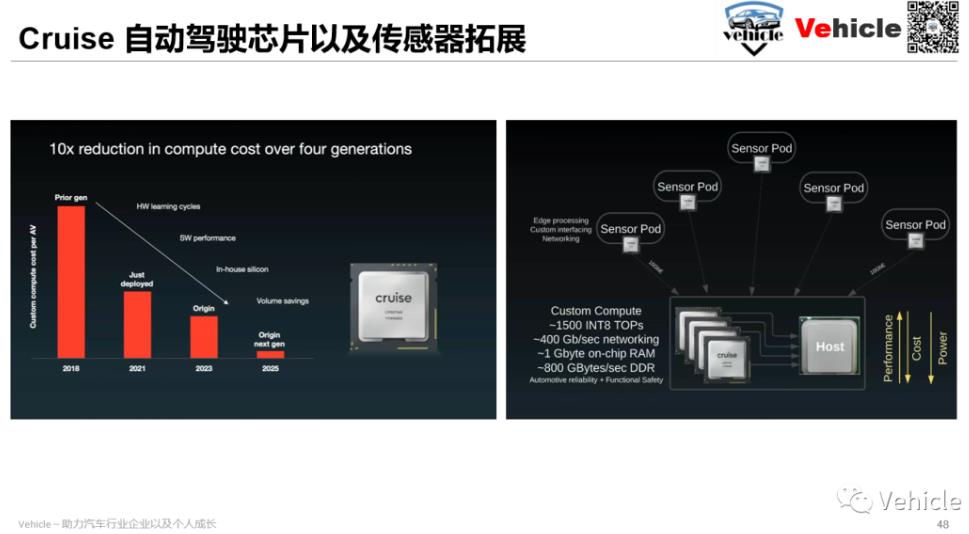
所以Cruise總結他的核心技術優勢是軟件以及算法,工具流程容易規模化,2023年拓展處理芯片自研裝配到其自動駕駛平臺車輛Origin。通過通用以及本田的合作,構建自動駕駛成本優勢的自動駕駛平臺例如其采用芯片到第四代時候成本減少10倍。
未來Cruise依托通用和本田合作Origin平臺來實現自動駕駛出行(包括運人,運貨)。

Cruise目前的計劃,就是通過其軟件算法,開發工具鏈容易規模的特征,降低自動駕駛車輛成本進行大規模拓展。
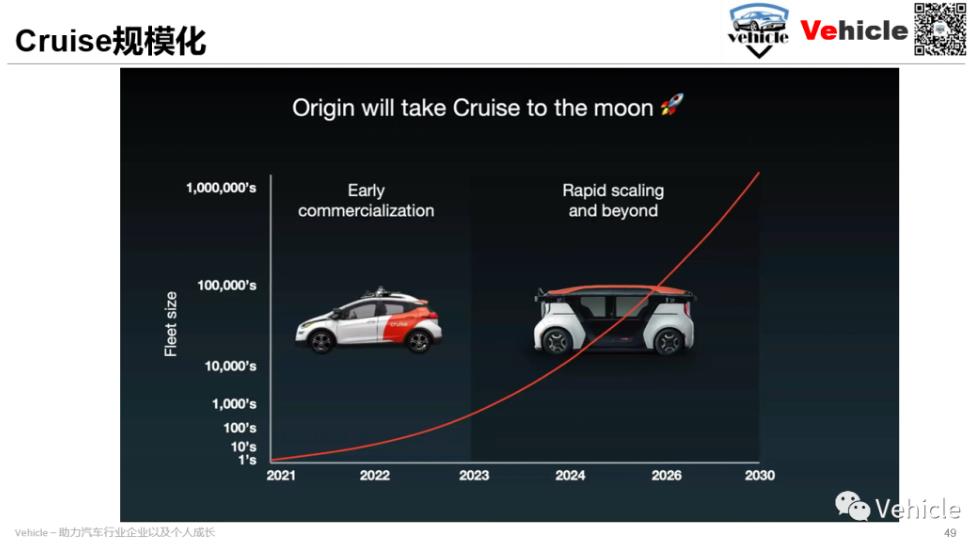
所以Cruise當前主要通過bolt進行商業化測試,未來的Robotaix 將會是其落地產品方向,當然Cruise的軟件算法工具鏈按照創始人Kyle的初心也是容易移植和應用到其他車輛和公司。
大概了解Cruise公司之后,讓我深入其自動駕駛技術,自動駕駛開發技術公司的評價,其實需要考慮到以下四個指標:
- 感知算法能力;
- 決策算法能力;
- 虛擬驗證能力;
- 開發工具以及流程
所以,接下來我們通過這四個方面進行分析探討。
二、Cruise自動駕駛技術
大概了解Cruise公司之后,讓我深入其自動駕駛技術,自動駕駛開發技術公司的評價,其實需要考慮到以下四個指標:
- 感知算法能力
- 決策算法能力
- 虛擬驗證能力
- 開發工具以及流程
通過這四個能力,可以判斷當前算法的能力,未來是不是容易快速拓展,未來是不是容易不斷更新,所以接下來我們通過這四個方面進行分析探討。
(1)感知算法能力
其實自動駕駛發展到現在,很多通用的感知都不是太大的問題,環境感知的難點都藏在現實生活場景的長尾理論中:

不明道路物體,例如路上躺著一只貓,拉貨超寬的車等不正常的駕駛,例如路上的特殊車輛警車,醫護車,占到停車等
不是僅僅跟隨交通規則就好了,例如占到停車,借道行駛但是另外道路車輛匯入等。
雖然這些駕駛工況屬于長尾問題,但Cruise 計算了在舊金山這種繁忙的城市里面,雖然是長尾的駕駛工況但發生頻率卻不低例如自行車匆忙行駛大概一個小時發生一次,汽車的匆忙行駛大概20分鐘一次。所以對于自動駕駛這些長尾問題都是需要重點關注的,要不然安全隱患太多。Cruise當前感知的高級經理是中國人,之前供職于滴滴自動駕駛的zhang yun,她介紹Cruise感知分為四部分:
攝像頭;
激光雷達;
毫米波雷達;
聲音,這比較特殊國內應該沒有人提到這個感知方式。
以上四種環境感知傳感器感知輸入給AI主干算法處理。目前Cruise采用的算法除了主干算法還有分割,紋理分類,屬性理解,目標跟隨,預測,閉塞推理等

首先四種傳感器應用相輔相成來覆蓋各種場景和特征,例如消防車輛,他的駕駛是非常不尋常也不遵守常理, 所以通過視像頭識別此類車輛的特征,通過激光雷達來檢測其門等的開啟(激光雷達能較好識別邊緣等特征具體點擊通過廣州車展-看自動駕駛激光雷達,所以這也造就城市自動駕駛大家都加激光雷達原因)

再通過聽覺識別其是否遠去和靠近,(這個其實和奔馳的觀點一樣,通過加入對聲音的識別來輔助識別目標物,了解點擊你想知道的奔馳的L3自動駕駛-功能和硬件)如果當雨霧天氣可以用雷達輔助識別。以上四種環境感知傳感器感知輸入給AI主干算法處理。然后分配給不同的算法任務例如:
分割,用來識別物體例如垃圾桶。
紋理分類,用來識別比較明顯的車輛。
屬性理解,用來識別尾燈以及開關門。
目標跟隨
預測行為
閉塞推理,用來推理看不到的地方,保持謹慎駕駛。
下面將對其中幾個Cruise認為其有亮點和特色的地方進行分享:
對于預測行為,采用深度學習的模型來實現目標物跟蹤而非采用傳統算法。通過深度學習算法,比卡爾曼濾波算法快0.7s識別物體,而且更好的預測運動。所以Cruise 給出一個例子,就是在路邊停著的車輛突然駛出泊車位,這個時候采用卡爾曼濾波算法的自動駕駛一般是選擇停止,讓行。但通過深度學習算法的自動駕駛可以不停避開行駛。
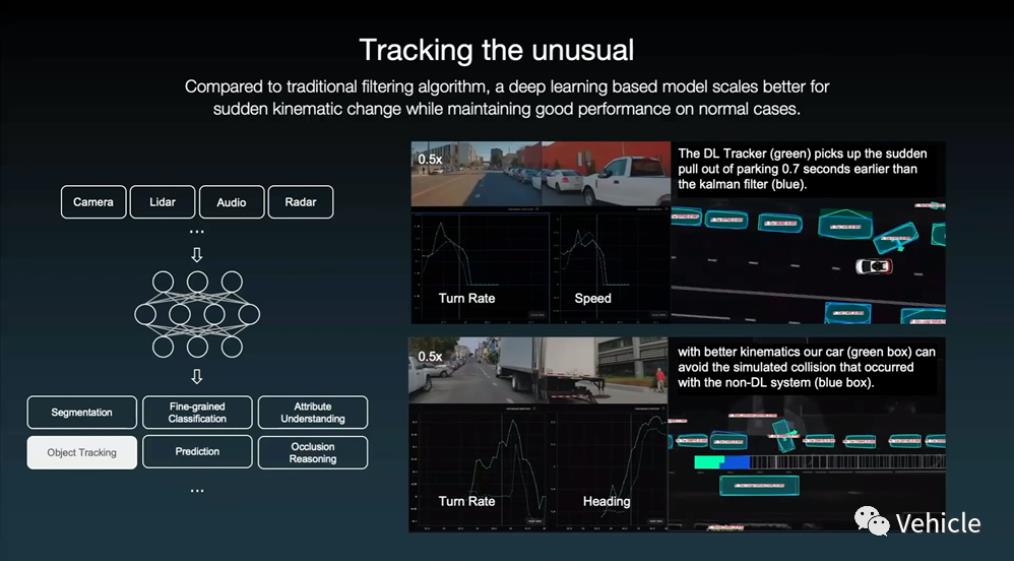
不但如此通過深度學習算法的自動駕駛還能更精準的預測駕駛行為,例如很多人在十字路口掉頭的時候,先會向右打方向盤,讓轉彎半徑變大,再左打方向掉頭。這個時候一般的算法就會預測他是右轉。
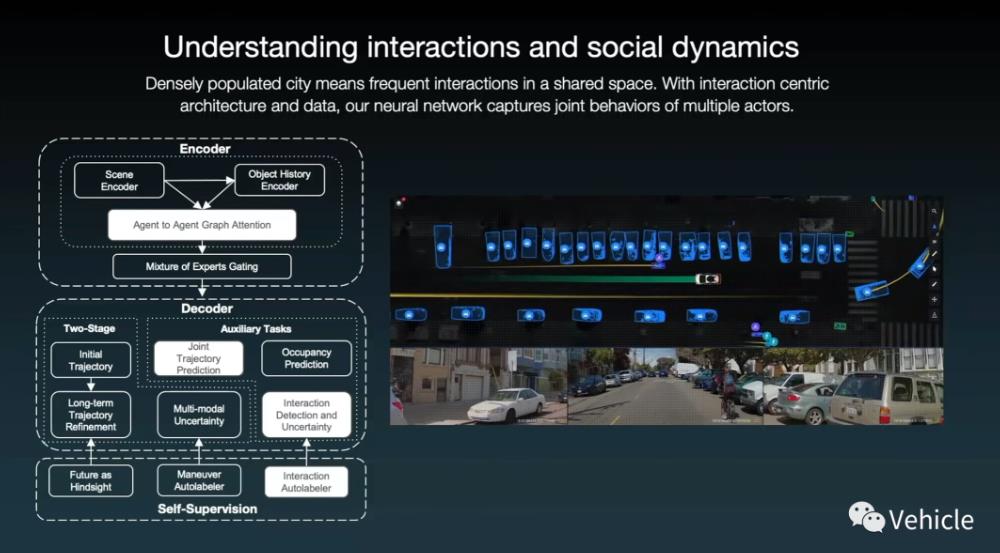
而這些主要基于以下Cruise的深度學習的預測神經元結構實現,其預測神經元結構主要分為以下三部分:
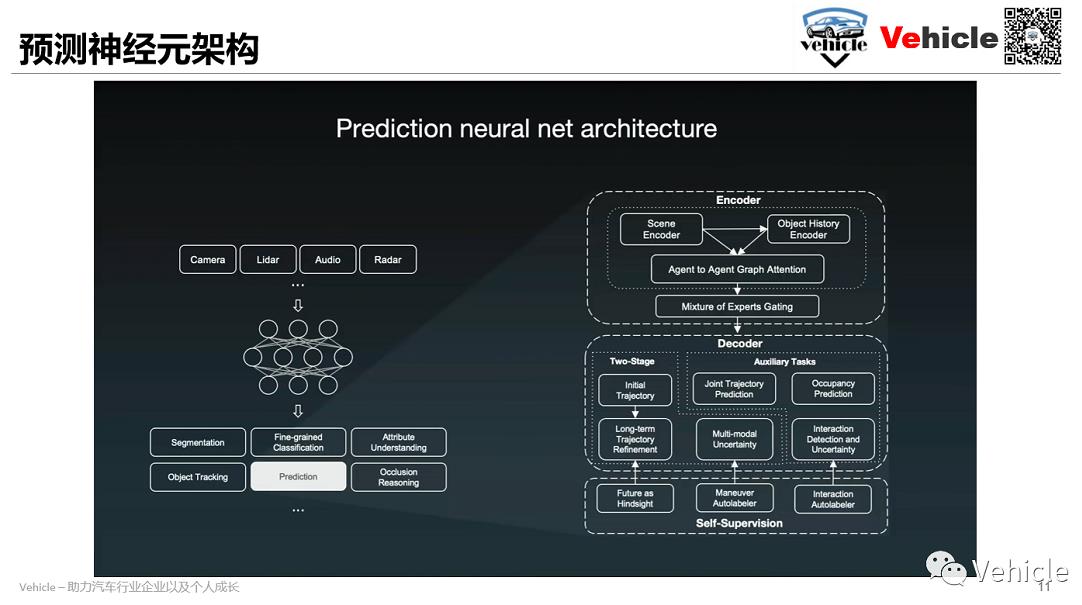
編碼通過場景編碼,目標歷史編碼,目標對目標圖形, 通過Cruise“ Mixture of experts” gating(后文會介紹什么是Mixture of experts)
解碼的主體為初始軌跡,長期軌跡的精細化,同時伴有輔助性任務例如交匯軌跡預測,占用預測,多模不確定性,交互識別以及不確定性。
自我監督,整個解碼和編碼如果成功就自我肯定,行為自我標簽,交互自我標簽。
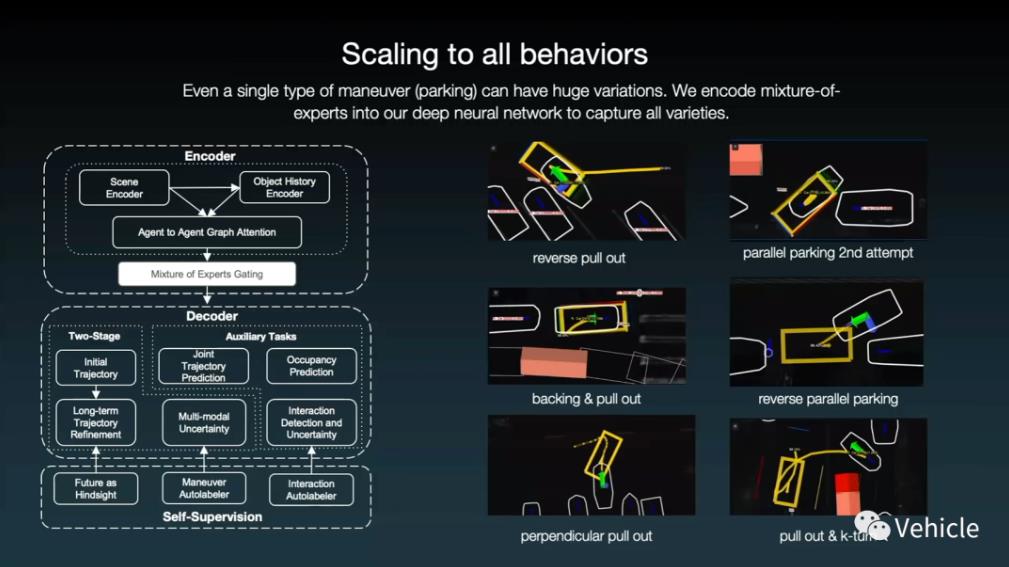
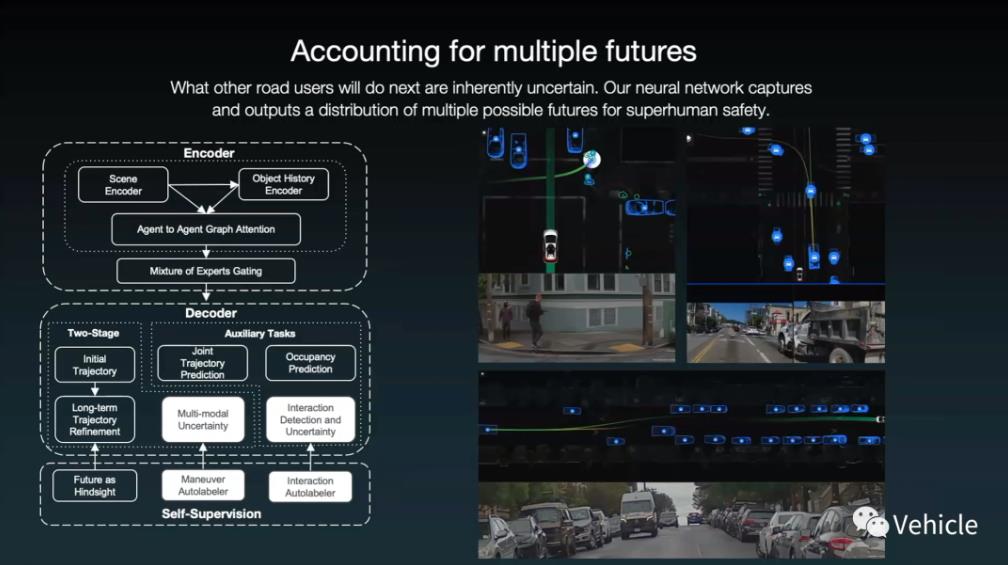
這樣一個深度學習方法可以自我們訓練學習。此類方法可以拓展到各類場景例如:城市駕駛行為,一個簡單的駕駛行為可以產生非常多的行為,所以Cruise將這些可能的行為編碼成“Mixture of experts” 輸入進入深度學習神經網絡來識別所有可能的后續行為。例如,出泊車停車位,斜泊車位,有人倒出,水平泊車位,有人先倒車再前行。垂直泊車位一般先右轉一點再左轉出停車位。水平泊車的多次嘗試,k自行的倒車。等等。
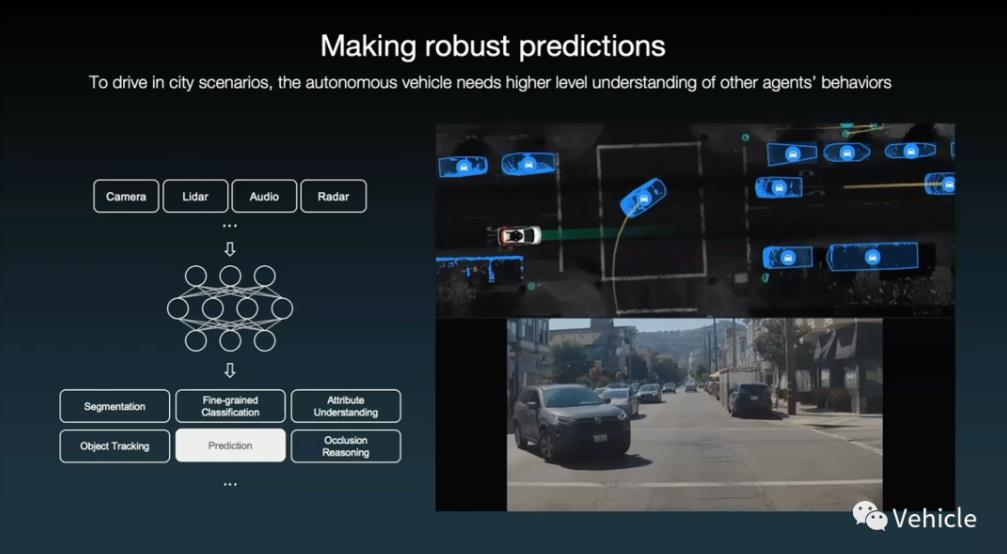
例如。當前面有自行車共同行駛時候,采用深度學習,交匯預測,交互不確定以及識別,最后通過對此事件結果進行自我標簽進入深度學習下一次使用。
同理對于城市道路的人流繁忙的十字路口,同樣適用。當然Cruise對于城市的不確定性也有一個task通過算法建立評估多模態不確定性,然后通過自我學習進行標簽標注。
例如,一個人穿過路口,他是看到車子停在路中間還是直行。對于閉塞推理,識別不到的場景或者看不到的情況,采取閉塞推理各種場景,防御性駕駛方式
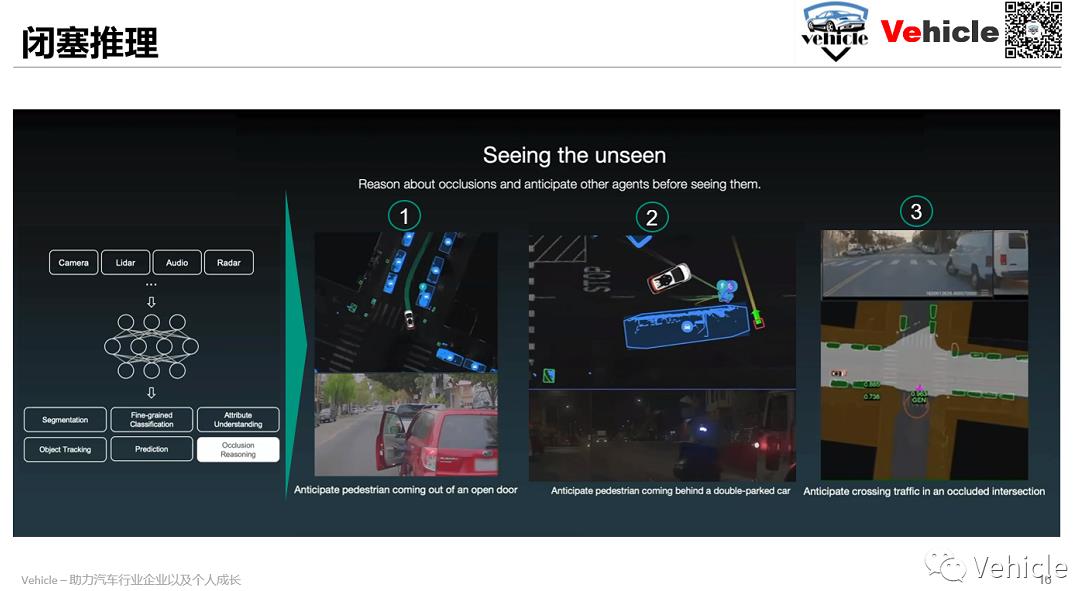
例如,汽車突然開門,大卡車盲區,十字路口推理等。對于人工智能算法的優化完善,必須要進行持續學習,所以Cruise設計位持續學習的機器,基于數據挖礦,通過對數據的挖掘可以顯著增加感知的精準和有效性。
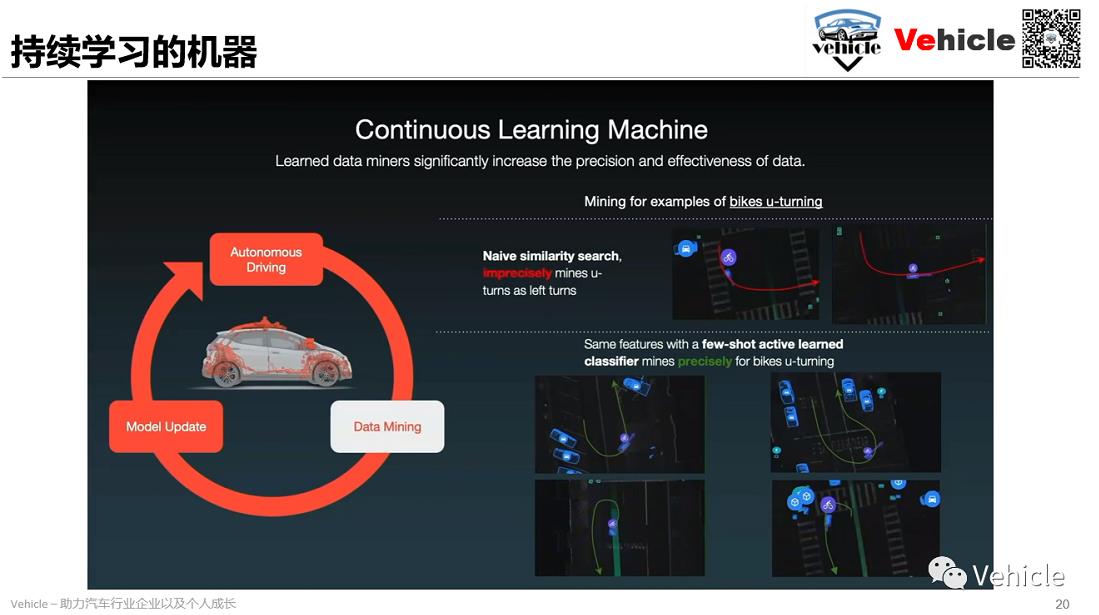
例如對于自行車的掉頭, 類似于天真的搜尋持續學習保障對于自行車掉頭的精準預測。以上為Cruise的環境感知的技術細節,主要亮點感知架構,預測架構采用深度學習,通過閉塞推理等保持安全謹慎自動駕駛。
(2)決策
當環境提供了感知,那么接下來教給自動駕駛的是決策,在談決策之前先要了解什么是一個好的決策?
Cruise 認為及時的,負責任的(對自己行為和他人),穩健和可重復的,決策是好決策,他給自動駕駛行為產生的結果會是,安全的,舒適的,像一個老司機。

那當前自動駕駛決策有哪些挑戰呢?主要為以下兩個方面:
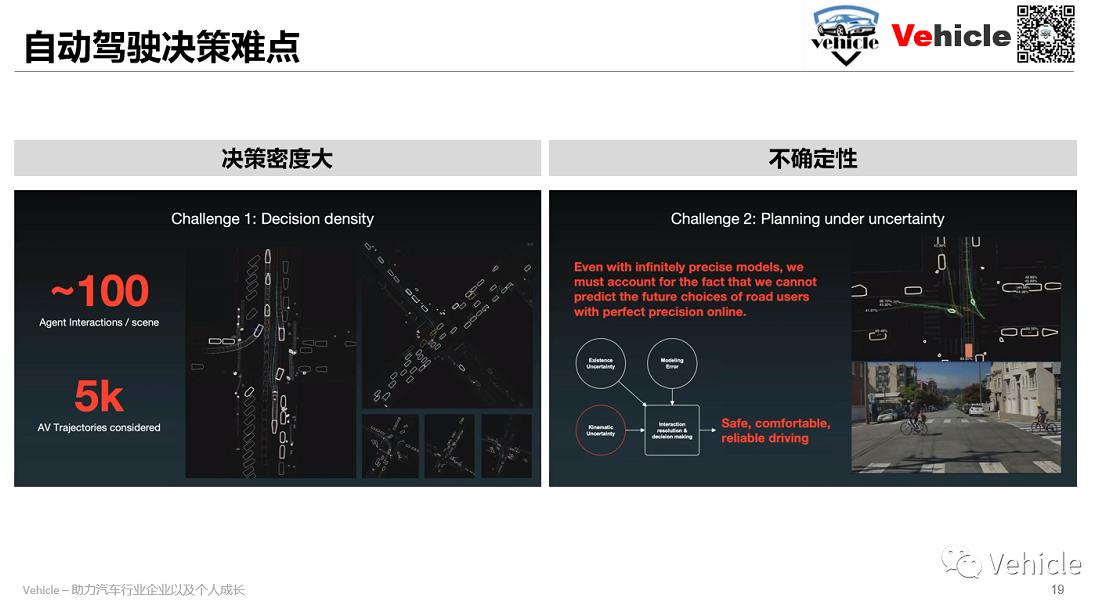
決策的密度,每個場景大概有100多次交互,5000個路徑的考慮。而這種場景發生是10-100次每秒。
不確定性,縱使使用無盡精準的模型,我們依然難以精準預測路面上的情況,例如十字路口自行車人摔倒等。
所以針對難點,Cruise決策機制如下:
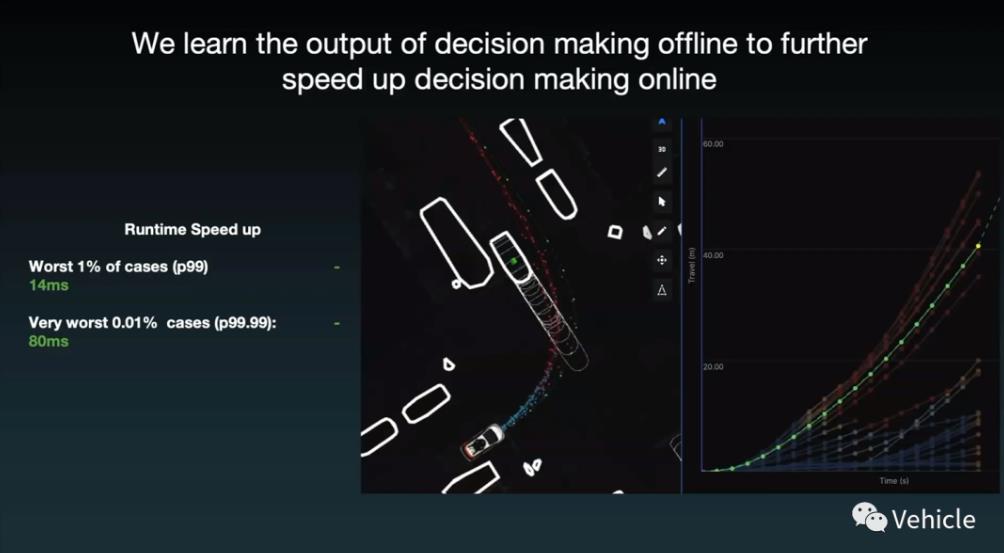
決策生成,自車結合所有交通參與者的預測信息生成自車初始動作信息,由于自車有多種可能性的動作,比如加速通行、停車、避讓等動作,會生成大量的備選軌跡,因此這里為了加速初解的計算效率,利用了機器學習的方法訓練了一個模型,通過機器學習的方法加速選出最好的軌跡。
沖突解決,根據自車動作生成模塊生成的初始動作,然后結合交通場景中的所有交通參與者可能的運動信息進行軌跡采樣,并對軌跡進行評分,選出最好的運動軌跡,并經過多次迭代做出最好的決策(3到4次)。其中軌跡評分會考慮安全性(碰撞、遠離騎行人和行人)、交通規則(停牌、紅綠燈)、舒適性(軌跡平滑)、不確定性以及全局規劃導航信息等。這里面還提到利用強化學習去解決不確定性問題。
計劃執行,基于以上產生的路徑,考慮車輛動態,現實環境控制干擾選擇最優執行控制。
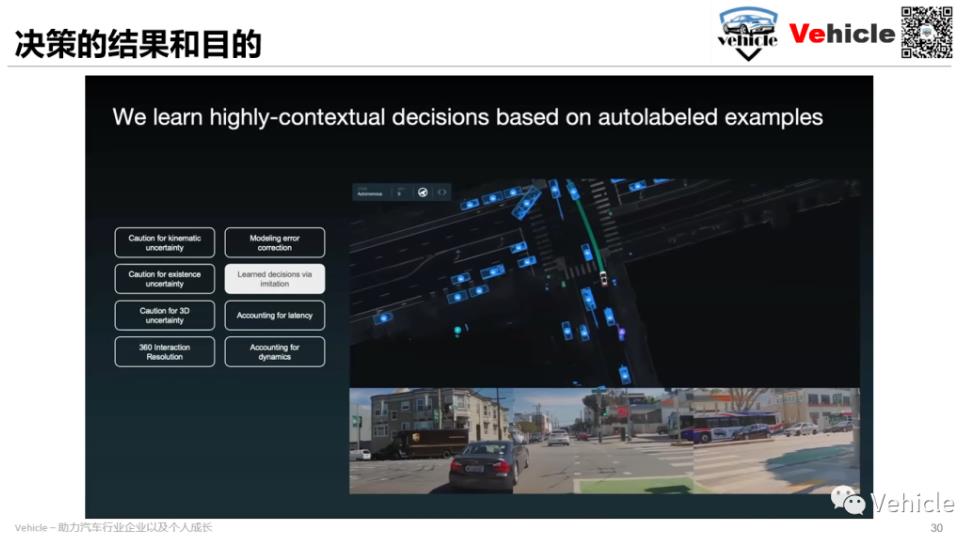
而決策的最終目的和結果主要為以下八個:
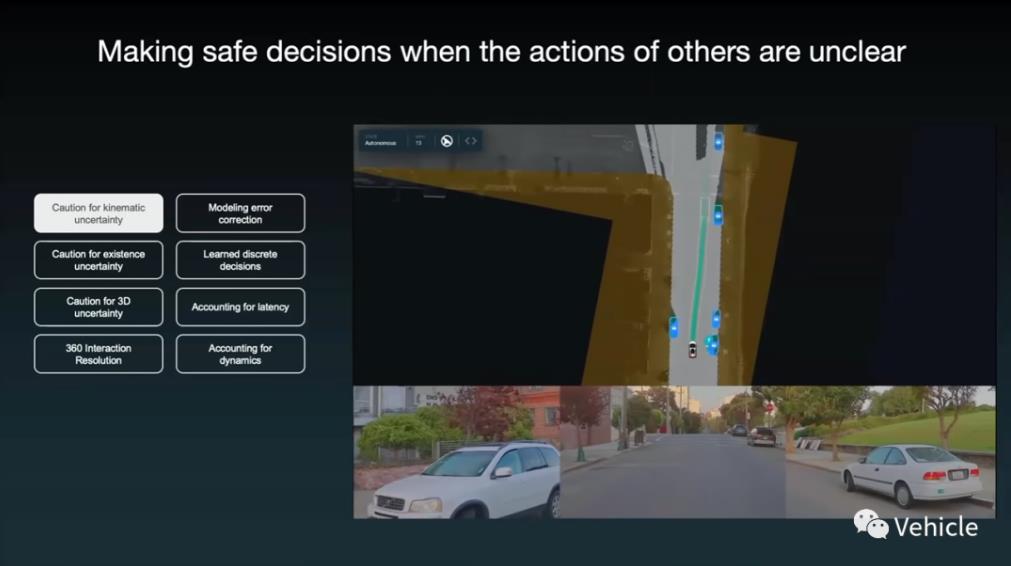
1,運動未知的不確定性
例如一個是前方停車的行人去打開車門(如果按照正常預測行人應該是走向路外,如果按照預測進行決策則不安全),而這里考慮了運動學不確定性,自動駕駛車輛謹慎駕駛減速避讓。另外一個案例是走到自動駕駛前方的時候自行車突然變為直行,從自車左方行駛過去,由于騎行人靈活,其預測一直是難點,而這里考慮了不確定性,提前反應保證了安全。
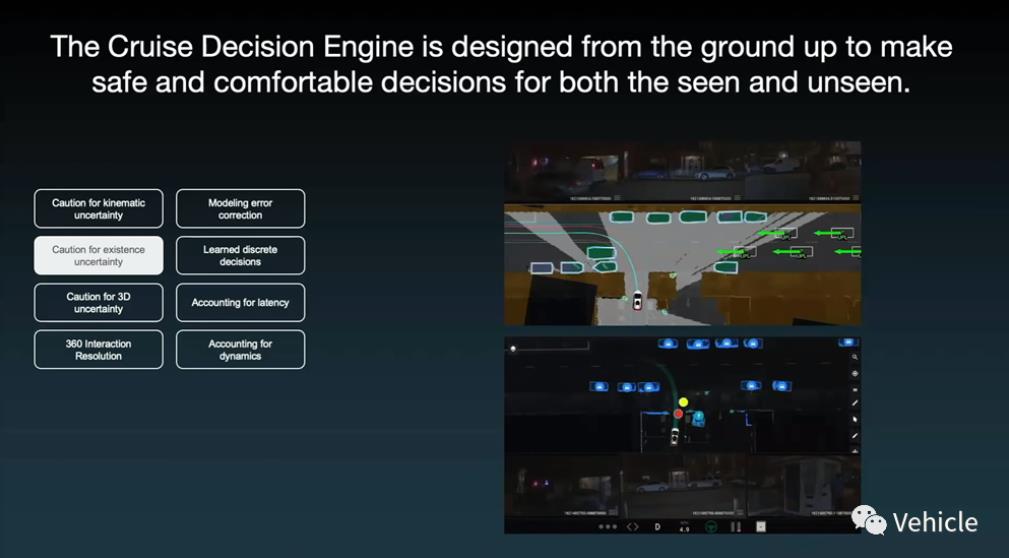
2,已知的不確定性
一般由于自動駕駛確實感知困難,例如自動駕駛車輛右前方的車輛不能觀測到,但自動駕駛車輛考慮右方有車往左方行駛,而謹慎駕駛,另外一個場景是,提前考慮到被遮擋的行人而緩慢行走。
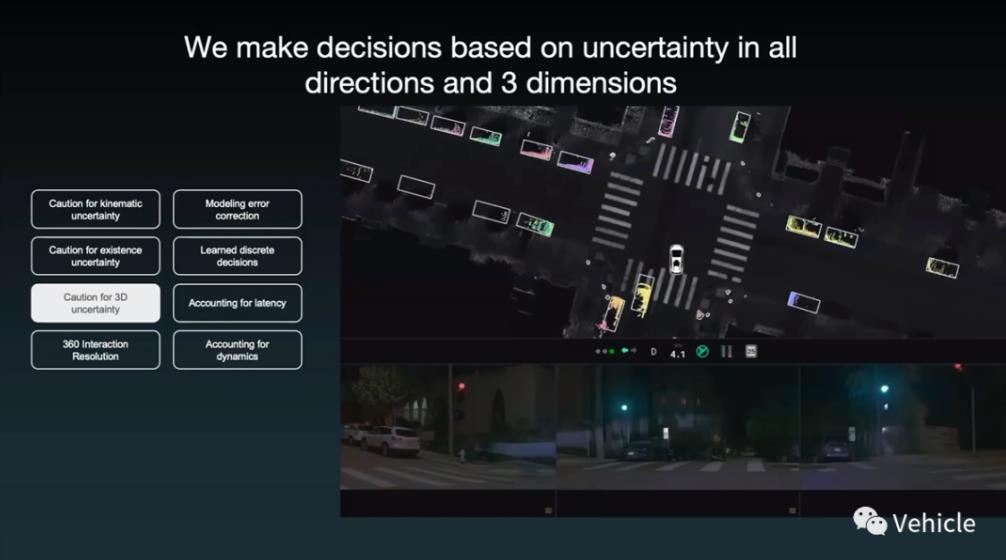
3,3D不確定性
例如前方的路上是坡道,無法提前看到對向來車,cruise自動駕駛車輛會謹慎駕駛提前減速,這樣處理是因為cruise考慮了前方是坡道的感知不確定性,當然下圖屬于2D無法識別3D上下坡等地形變化。
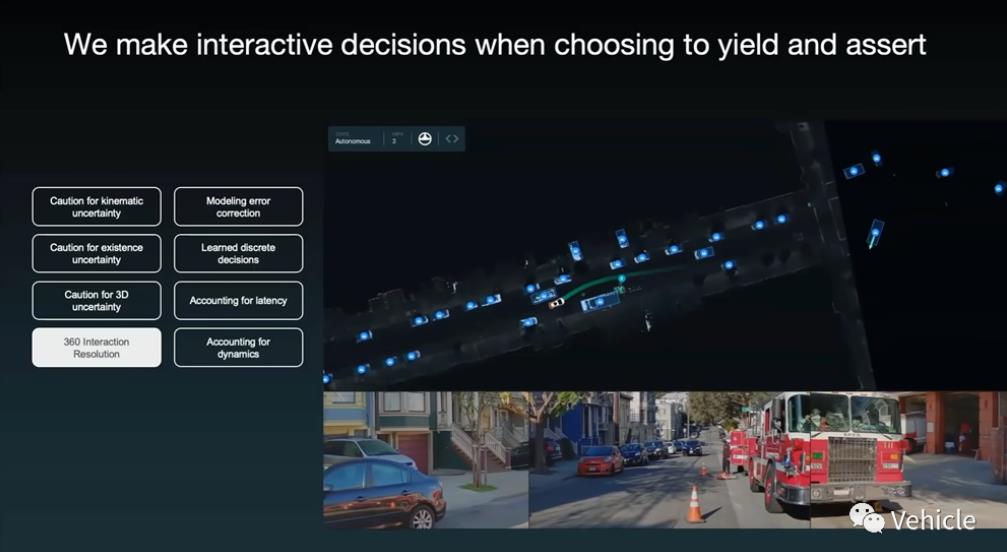
4,360環繞交互博弈
自動駕駛博弈交互是難點,首先Cruise在交互時候,會考慮我們的決策怎么影響他人,他人的決策怎么影響我們,例如十字路口時候,自動駕駛車輛猶豫,那么另外車輛堅持;自動駕駛車輛堅持,那么另外車輛猶豫,還有很多情況。
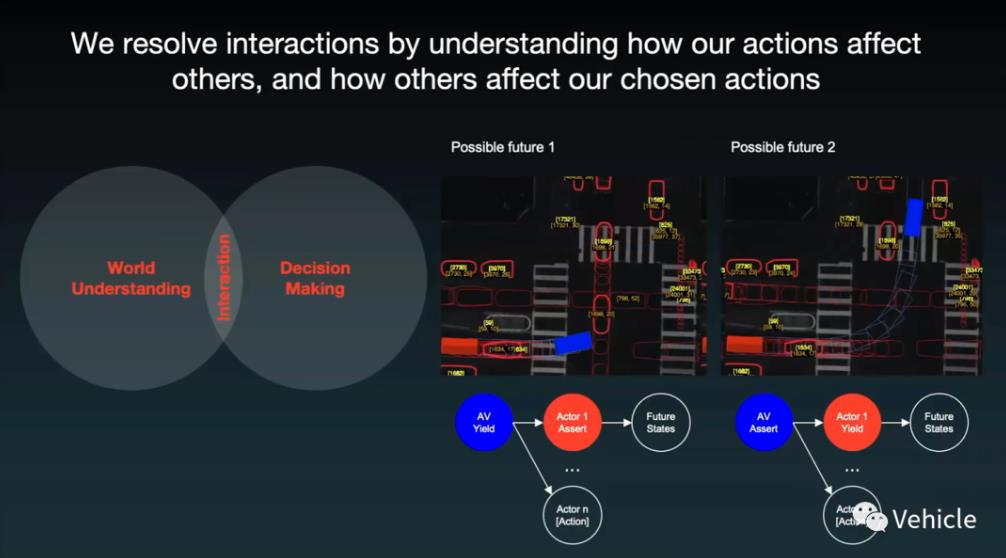
通過對自車行為對他車影響及他車對自車的影響進行交互博弈決策,因為我們的自動駕駛系統中不能只考慮自身的舒適性、安全性,而不去考慮其他交通參與者的體驗。我們的決策是需要在考慮整體的平衡時提高效率,所以設計評價指標時除了自車舒適性、效率、安全性等還需要考慮交互車輛的感受。這里舉了兩個例子,一個是讓行,一個是搶行。
5,建模誤差糾正
一些場景沒有符合我們期待的預測,例如人行道上兩個人向右行走,但有一個人帽子掉了,很多種可能這人撿完帽子往左跑,撿完右跑,這里面的自由度非常大,所以Cruise采用強化學習的方法離線訓練模型,進行仿真模擬確保多場景的考慮。
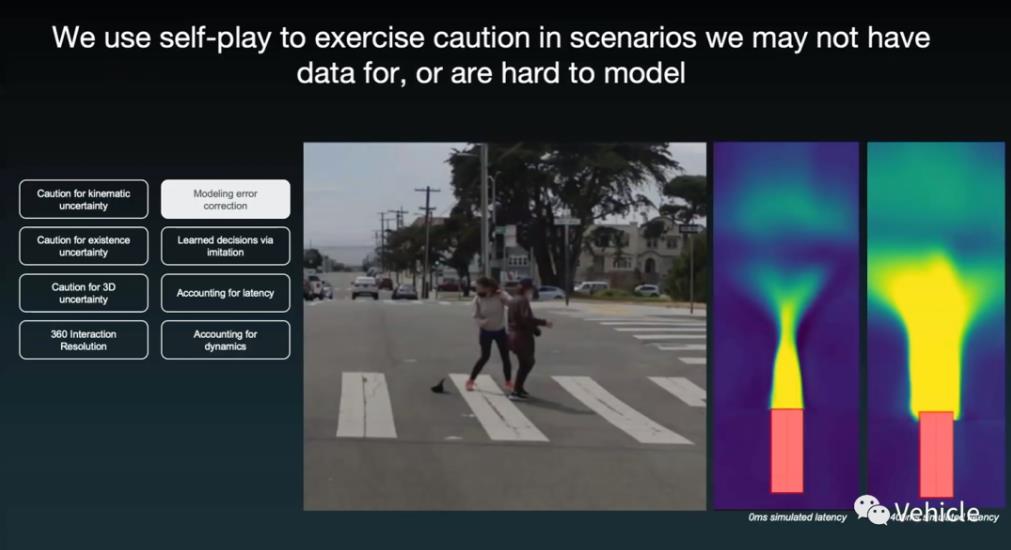
Cruise 用同樣的方法去訓練兩臺車同時停相鄰停車位的場景,確保停車運動最優。

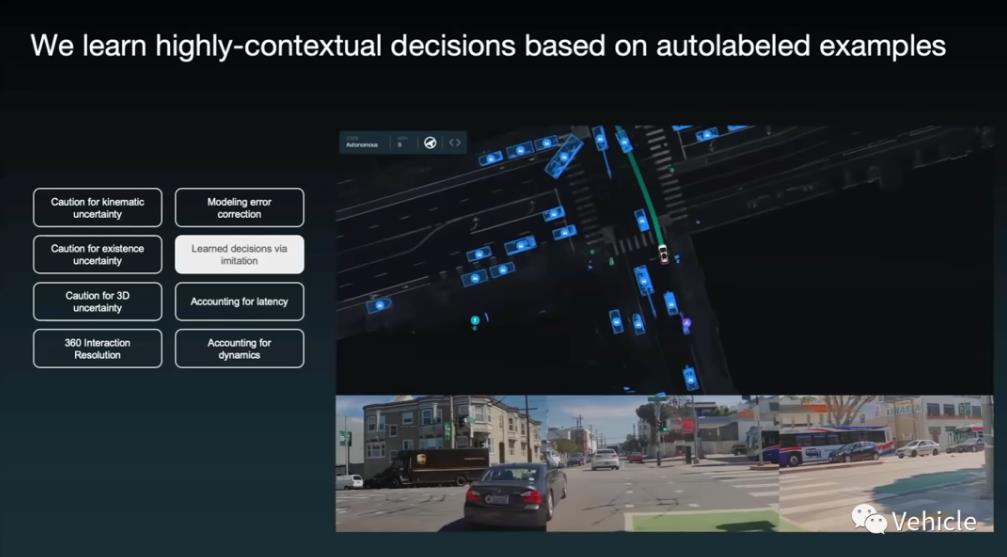
6,通過模仿學習決策
使用模仿學習的方法,并離線訓練策略網絡生成模型進行決策,例如學習前車超過前方慢行左轉的車輛場景。
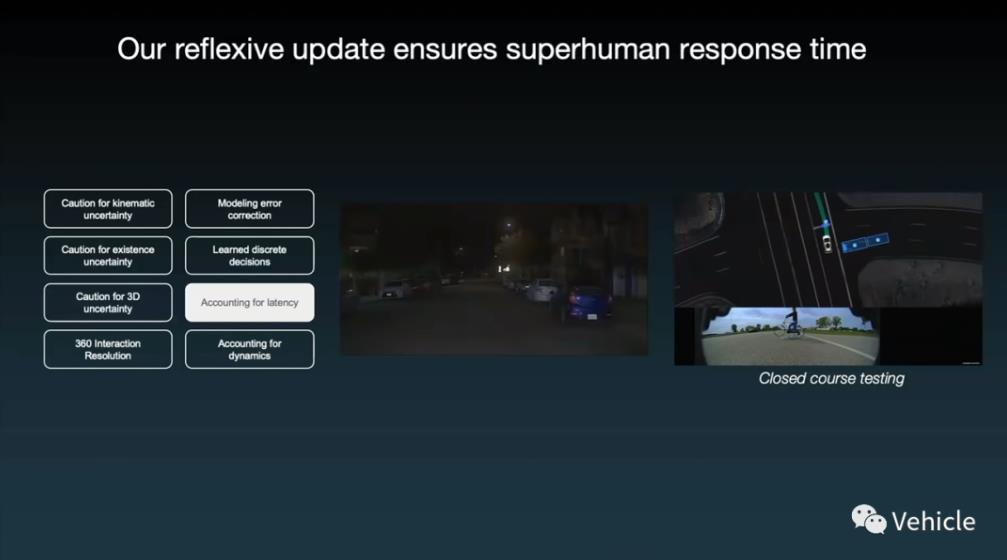
7,考慮滯后性
從自動駕駛車輛右方突然竄出一輛自行車,如果正常的決策流程的話很可能反應延遲撞上去,因此這里cruise利用強化學習的方法離線訓練類似場景,跳過預測,直接輸出決策給規劃和控制,及時剎車。這里有點類似AEB(緊急自動剎車),在自動駕駛系統設計中需要考慮應急系統解決這樣的場景,生活當中比較常見的事故發生原因 。
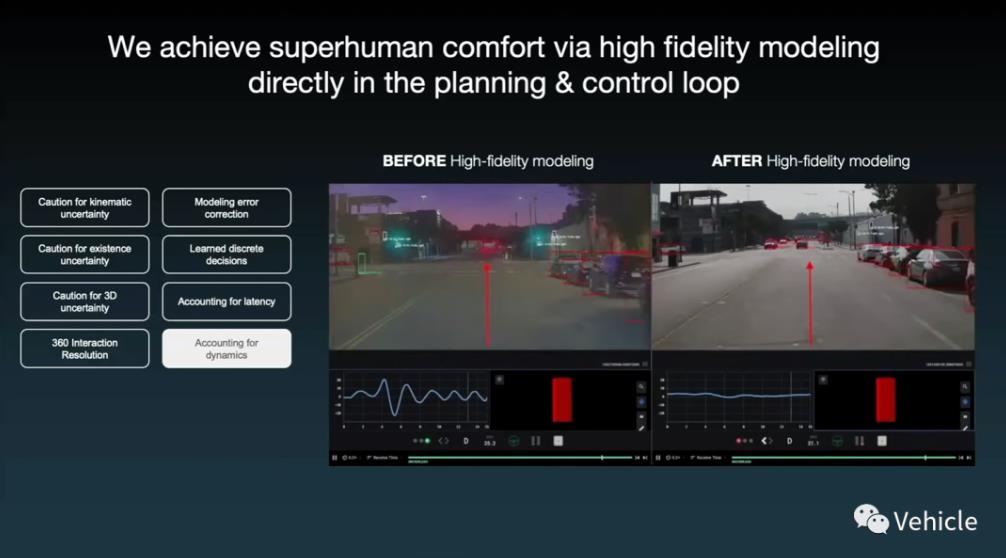
8,考慮整車動態性能
通過設計一個高保真車輛和環境的動力學模型在規劃控制閉環系統,保證了自動駕駛駕駛的舒適性和安全。
以上結論,Cruise表示很自豪的采用機器學習offline 來加速決策算法的優化。
(3)虛擬驗證
顯然從上文可以知道,自動駕駛主要是算法軟件架構的競爭,而算法的完善需要大數據的挖掘,首先要有足夠的長尾場景,基于長尾場景的corner case逼近極端狀況重復測試學習得到最優解。所以Cruise 建立Morpheus虛擬驗證開發系統,減少路試,利用規模化和未來拓展,這些同理類似于自動駕駛元宇宙的系統,和我們之前講到Nvidia英偉達的 AI 智能汽車信仰中的Omniverse類似。

Morpheus提供了虛擬平臺,但使虛擬平臺需要構建虛擬場景,如何構建虛擬場景呢?Cruise 介紹其以下幾個方面進行:
道路到虛擬Road to SIM, 把現實場景轉化到可以編輯的虛擬場景。
NPC(Non-player character) AI - 來自于游戲概念,把場景中的人,車輛賦予運動。
World Gen 世界生成,規模化快速化拓展不同城市虛擬世界,而且支持不同光線和時間天氣。
其他同時包括對于汽車動態以及不同傳感器虛擬。
當然自動駕駛元宇宙的構建并不意味著不需要測試,Cruise CEO在問題采訪時候表示,其實自動駕駛算法的建立的原則使需要用戶使用場景的定義輸入,那么用戶場景定義怎么來的呢?來自于三個方面:
1,路試以及數據采集
2,工程師的設計
3,根據路試采集的情況進行極端情況的虛擬所以這里表示路試依然非常必要,他影響到最原始的需求定義,豐富的使用場景才能確保算法和接下來的工作正確。
(4)開發流程工具
自動駕駛的開發,其實和整車開發一樣需要完善的流程和工具鏈才能確保眾多參與開發的人員高效(了解整車開發流程點擊整車開發流程-完結篇)。Cruise 宣稱其工具鏈全覆蓋從物理路試到云端代碼,整個工具鏈相互融合數據自動流轉,可以讓路試數據實時傳送分析,供工程師算法學習虛擬驗證,可以在一周內進行多次的算法更新部署到路試車輛。
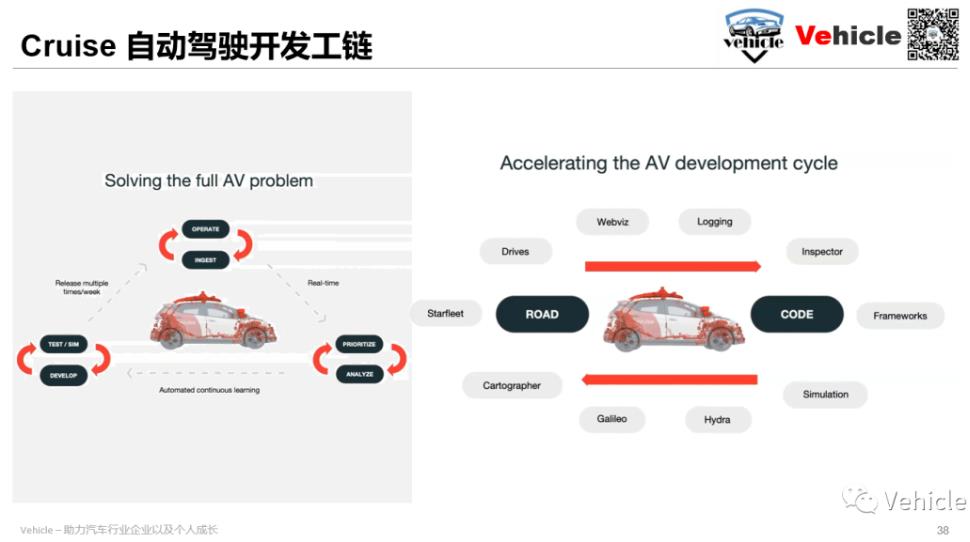
他的工具鏈包括:
Starfleet,Drive用于路試端的數據以及場景,一天可以采集上千個自動生產進入Webviz平臺,logging,inspector,framework等工具自動提取高質量數據。Simulation系統通過采用與谷歌合作的Hydra批量調度平臺進行虛擬,Galileo應該是算法管理系統. Cartographer 是 Cruise Maps 網絡平臺,允許用戶創建、可視化、編輯和試驗高清語義地圖,所有地圖創建和維護工作流程的中心。最后釋放到starfleet 部署路試車輛。
聽起來很美好,確實現代汽車開發,特別是大數據時代,工具就是生產力,我曾經見過各種因為工具和流程問題導致開發效率大大降低,縱使工程師沒日沒夜的加班也只是浪費精力降低創新度,這個在國內企業非常普遍,工程師拼加班時間,這是最大的浪費,用戰術上的勤勞掩蓋了戰略上的懶惰。
三、Cruise 未來方向
當然通過上文看下來,如果問到Cruise的優勢,應該是背靠大樹北美的通用,日本的本田,能夠快速落地畢竟這兩家的汽車銷量都非常高,所以Cruise不缺錢也不怕落地問題。

目前最快落地的就是Origin Robotaxi可以用于出行以及短途物流行業,依托通用以及本田的工程能力和供應鏈。這個項目有點像現代起亞集團的Purpose build vehicle系列(KIA起亞汽車的2030戰略),也有點像咋們國內搞得很火滑板底盤(什么是“滑板底盤”?什么商業模式?)。
所以Cruise 目前得技術儲備是大規模化可拓展,構建工具鏈,所以目前Cruise 在網上散步的信息也透露出對人才的饑渴,畢竟不缺錢,資本也希望看到接下來通過Origin的規模化,甚至對通用和本田內部的自動駕駛技術反哺。
當然除了自動駕駛落地,內部算法和工具鏈,Cruise也和特斯拉一樣,走自研芯片的道路,芯片包括AI車端芯片,用于傳感器,中央處理,也包括AI學習批量數據處理云端芯片。
四、總結
Cruise的野心在通用汽車以及本田汽車的催生下,應該是非常巨大,其商業模式以及算法工具鏈都為大規模鋪開而準備。
參考文章:
通用Cruise 投資者報告 - Cruise;
Autonomous Driving Moonshot Project with Quantum Leap from Hardware to Software & AI Focus - 德勤;
Autonomous Vehicles: Navigating the legal and regulatory issues of a driverless world- MCCA ;
自動駕駛安全報告-通用;
The autonomous car A consumer perspective- Capgemini;
自動駕駛測試以及部署問題 - CRS;
Cruise 高清地圖的三種方式為我們的自動駕駛提供優勢- Cruise高級產品經理ERIN;
Cruise自動駕駛決策規劃技術解析 - 知乎自動駕駛拖拉機;
Cruise under the hood視頻-Cruise;
作者:Vehicle Pirate Jack






