
導(dǎo)讀:今年CES上,4D成像毫米波雷達(dá)聲勢奪人,一眾芯片企業(yè)諸如恩智浦、TI、Mobileye都陸續(xù)推出或更新了自己的成像雷達(dá)方案,毫米波雷達(dá)系統(tǒng)廠商Arbe、Zadar Labs、Smartmicro等也都帶來了各自的成像雷達(dá)產(chǎn)品。
其中最受到業(yè)內(nèi)人士關(guān)注的,莫過于Mobileye 首席執(zhí)行官Amnon Shashua 在 CES 演講中對4D成像毫米波雷達(dá)的強(qiáng)調(diào),“(到2025年)除了正面,我們只想要毫米波雷達(dá),不想要激光雷達(dá)。”
Yole Développement 的Imaging 首席分析師 Pierre Cambou 表示,該演講引發(fā)了人們的猜測,即Mobileye 現(xiàn)在不認(rèn)為激光雷達(dá)“比雷達(dá)更重要”。
VSI Labs 的合伙人兼咨詢服務(wù)總監(jiān)Danny Kim 更是在 CES 后發(fā)布的一份報告中寫道:“與過去的 CES 活動不同,感覺激光雷達(dá)公司并沒有為行業(yè)帶來那么多突破性的發(fā)明” 。“另一方面,4D毫米波雷達(dá)越來越受歡迎”,并稱4D毫米波雷達(dá)正成為汽車傳感器中的“新星”。接著這個機(jī)會本篇文章將圍繞4D毫米波雷達(dá)相比于傳統(tǒng)毫米波雷達(dá)的有了哪些重大進(jìn)步進(jìn)行一些分析。
一、優(yōu)勢一,精確探測俯仰角度
4D毫米波雷達(dá)高度探測的優(yōu)勢—精確探測俯仰角度,獲取目標(biāo)真實高度信息。
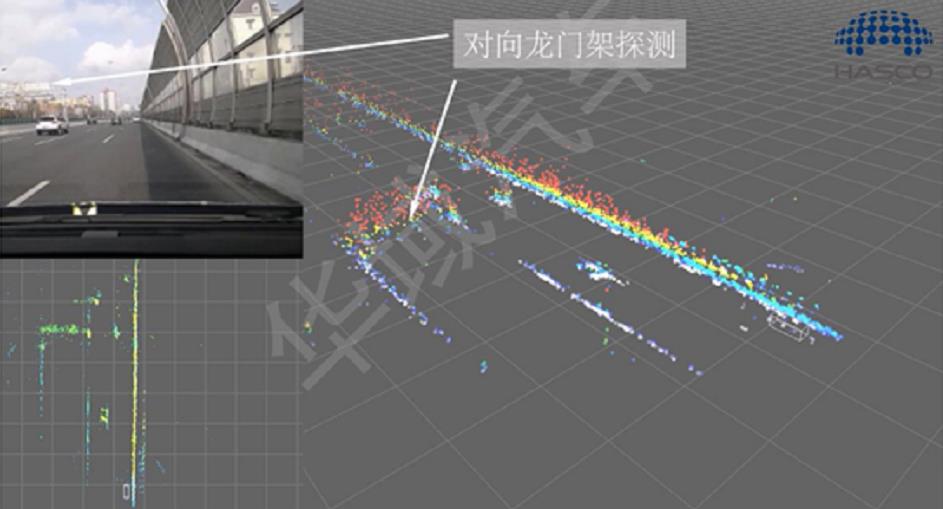
我這里放了一張圖,是華域4D毫米波雷達(dá)l230實測的一張圖這里面放的都是沒有跟蹤過的結(jié)果原始點云。左上角的攝像頭是在車上裝了一個攝像頭,幫助大家去理解這個環(huán)境。左下角的原始點云是一個鳥瞰圖,右邊的我們稍微有點側(cè)角可以幫助大家來看它是有一定的不同的高度的分布的。這個右邊的框有個虛框,這個表示我們自車。
為了直接表示這個點云它的高度,我們把它顯示的時候把它按不同的高度用不同的顏色做了區(qū)分,這里邊紅色的區(qū)域是表示超過3米的比較高的目標(biāo),然后下面這個白色的是表示它靠近地面的目標(biāo)。從這里面可以看到它有很多原始點反射出來,每一個點都告訴我們說它是一個高處的障礙物,這就是我們跟傳統(tǒng)的雷達(dá)它有一個非常直觀的區(qū)別。
1、傳統(tǒng)雷達(dá)的高度探測能力如何?
一般來說傳統(tǒng)毫米波雷達(dá)的高度測試都是針對于靜止目標(biāo),因為對于傳統(tǒng)雷達(dá)來說,運動目標(biāo)我們一般不假設(shè)它是一個在高處懸空的東西,或者是在地面的東西,一般認(rèn)為它是一個正常的在道路上行駛的東西,這樣的話也是合理的,也就是規(guī)避了對運動目標(biāo)做精確的高度檢測這么一件事情。
但是對于靜止的障礙物的話,這個就很重要了,我們一定要能搞得清楚,前面雷達(dá)檢測到的一個目標(biāo),它到底是地面上的一個可通行的目標(biāo),比如說像減速帶或者施工的鐵板,還是我們正前方的,比如是一輛禁止的車輛,還是高處的一個路牌或者是一個橋?
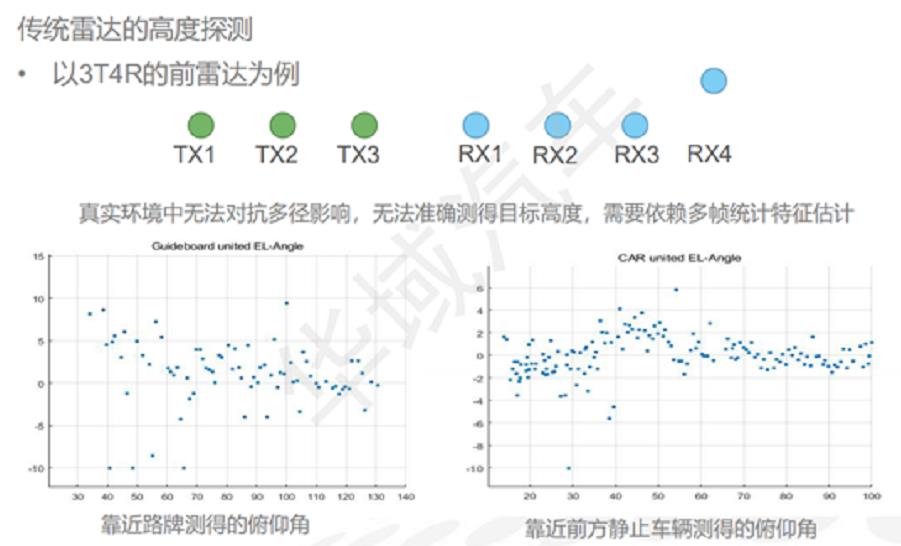
我們傳統(tǒng)的雷達(dá)因為一定要應(yīng)對這些場景,所以也是對于高度探測這塊也做了很多的工作。比如我這邊拿一個普通的三發(fā)四收的前雷達(dá)舉例子的話,可能三個發(fā)射,我們還要把它再分成其中兩個發(fā)射。比如說做遠(yuǎn)距離的探測,因為這時候這兩個天線會做增益比較高,波速比較窄,然后第三個發(fā)射可能做近距離它波速比較寬。
4個接收的話,可能除了水平排布以外,可能還會有1個通道在俯仰位會有1個錯開,當(dāng)然這個不是絕對的,這個是一種比較典型的布陣。基于這個布陣的話,就可以看到大家知道我們雷達(dá)側(cè)角的話,其實都是基于接收通道,或者說等效完以后的陣列中接收通道之間的相位差,利用這個相位差來解算我們的角度,我們可以看到圖上俯仰位也有一個錯開的基線,基于這個基線我們可以去結(jié)算俯仰的高度,也就是目標(biāo)的高度。這也是為什么我們看到傳統(tǒng)的雷達(dá),它其實上面也會標(biāo)這樣的一個指標(biāo),比如說負(fù)向檢測的角度的精度,甚至精度可能可以達(dá)到很高。
實際上來說的話,傳統(tǒng)雷達(dá)都會去利用多幀的統(tǒng)計的信息去做一些判斷。我這邊舉一個例子,我們還是利用俯仰角的信息,它雖然受多晶影響已經(jīng)不準(zhǔn)確了,比如說左邊這個圖是一個靠近路牌的時候,再自測到靠近路牌,然后測得的一個俯仰角,橫軸是這個距離,可以看到在不同的距離下,它的測到的俯仰角的抖動是比較大的。
同樣我們上面一張圖右面這個圖是假設(shè)我們前面是一個禁止的車輛,我們測得的俯仰角它的抖動也是有時候是正的角度,有時候測出來是負(fù)的角度,但是我可以看到它的均值差還是有一些特點,所以我們在傳統(tǒng)雷達(dá)里,我們利用多幀統(tǒng)計到的信息,再結(jié)合一些其他的特征,像他們rcs的變化,其他一些特征來做這個高度探測,這樣做帶來的一個問題就是實際上他的致信度是比較低的。
2、傳統(tǒng)雷達(dá)高度探測的缺點
對靜止障礙物高度探測不準(zhǔn)確,在融合系統(tǒng)中置信度低。

我們傳統(tǒng)雷達(dá)因為對禁止障礙物高度探測不準(zhǔn)確,在這個領(lǐng)域它在融合系統(tǒng)中置信度低,所以在很多事故里面也可以我們直接看到影響,比如說我這里邊找了兩個例子都是特斯拉的,就是說它都是車輛直接撞到了前面的一個大型的反射體。對于雷達(dá)來說的話,它前面是一個這么大的車輛,它是不可能沒有反射信號的,應(yīng)該說這個反射信號按照正常來說它是很強(qiáng)的。
但由于對障礙物的高度探測不準(zhǔn)確,即便雷達(dá)檢測到了有障礙物。但因為置信度的問題,如果視覺系統(tǒng)覺得沒有障礙物那么系統(tǒng)依然會選擇相信視覺而不是雷達(dá),最終判斷沒有障礙物導(dǎo)致車輛直接撞了上去。
二、優(yōu)勢二,高靈敏度
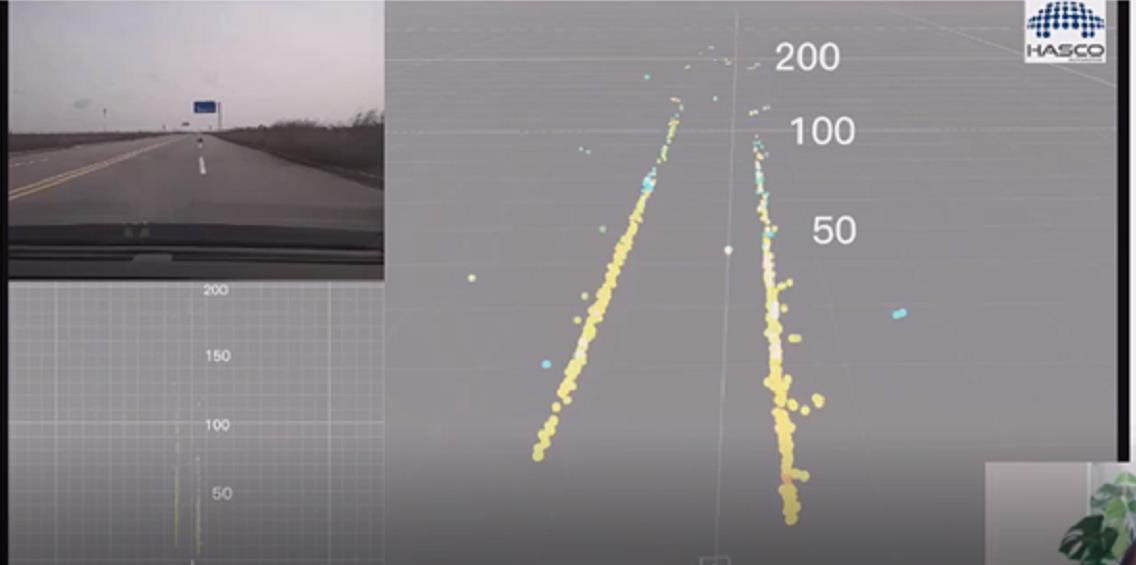
如何去證明4D毫米波雷達(dá)的超高靈敏度用2張圖就可以很好的詮釋。
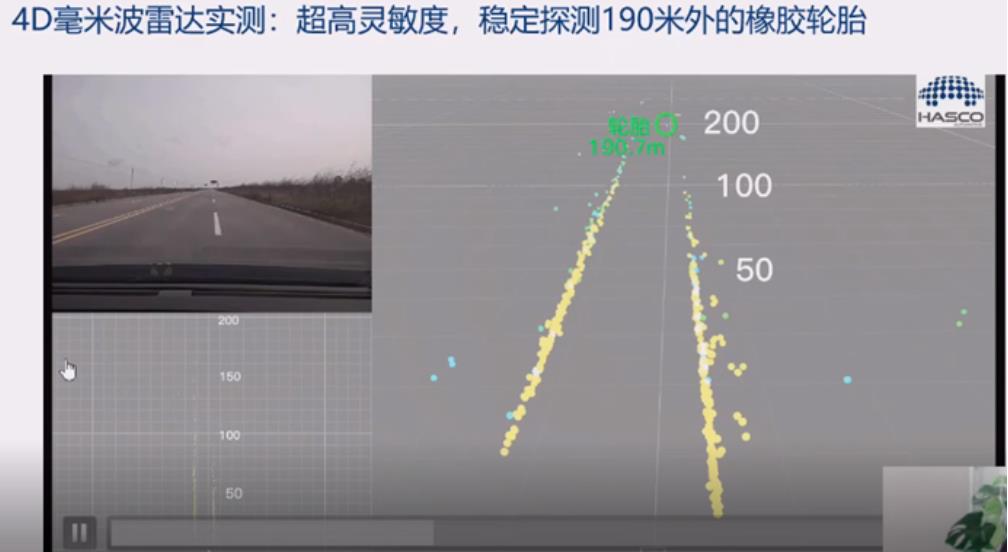
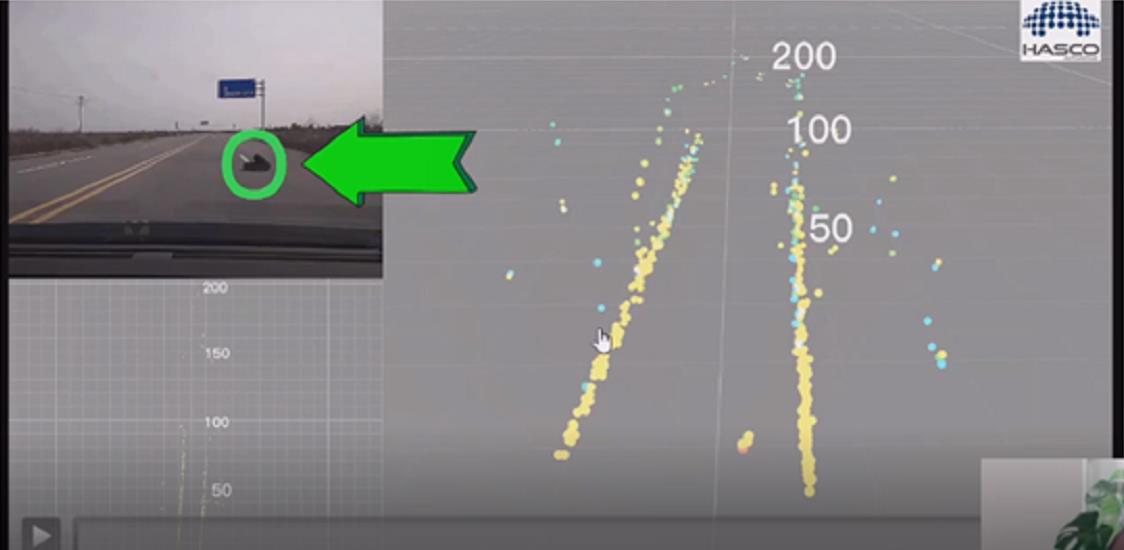
上圖可以看到,在視覺還沒有辦法探測到障礙物輪胎的時候,4D毫米波已經(jīng)在190米外探測到了。
這是五十米左右,4D毫米波對障礙物輪胎探測到的點云。
這是近10米的點云圖。
除了超高靈敏度外,4D毫米波雷達(dá)對微小障礙物的探測效果也非常好。
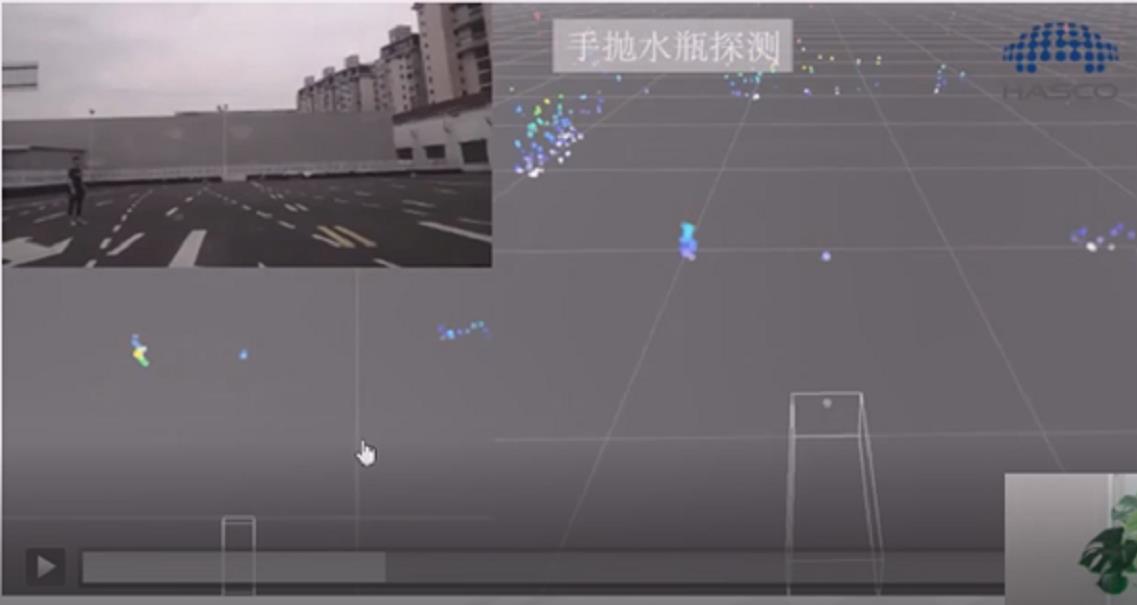
上圖是手牌水瓶的探測圖,可以看到中間的水瓶也可以被4D雷達(dá)很好的探測到。
三、優(yōu)勢三,高分辨率
雷達(dá)作為一個傳感器來說它最大的功能,就是要準(zhǔn)確的描繪周圍的環(huán)境,我們周圍的環(huán)境的物體怎么把它分開,對于雷達(dá)來說的話,至少可以從三個維度,就是距離速度還有角度,這三個維度我們都可以去把周圍的環(huán)境刻畫的更精確。
1、關(guān)于距離
對于雷達(dá)來說的話我們距離的分辨率它是直接跟我們的帶寬有關(guān)系的,那也就是說我們帶寬越寬它的具體覆蓋率就越高。所以說我們?nèi)绻F(xiàn)在76~77或者70~79,我們有大概接近一個g或者接近三個g帶寬的話,其實這個距離分辨率是相對來說已經(jīng)是做到各個傳感器里面很好的一個級別
2、關(guān)于速度
速度的精度和分辨率,其實它都跟我們發(fā)播的時間有關(guān)系,在每一幀里邊我們發(fā)播發(fā)多長時間,現(xiàn)在我們基本上哪怕是傳統(tǒng)的雷達(dá)精度和分辨率,大概也都能做到0.1毫米每秒這個量級,所以說這個也是一個毫米波雷達(dá)最大的優(yōu)點。
3、關(guān)于角度
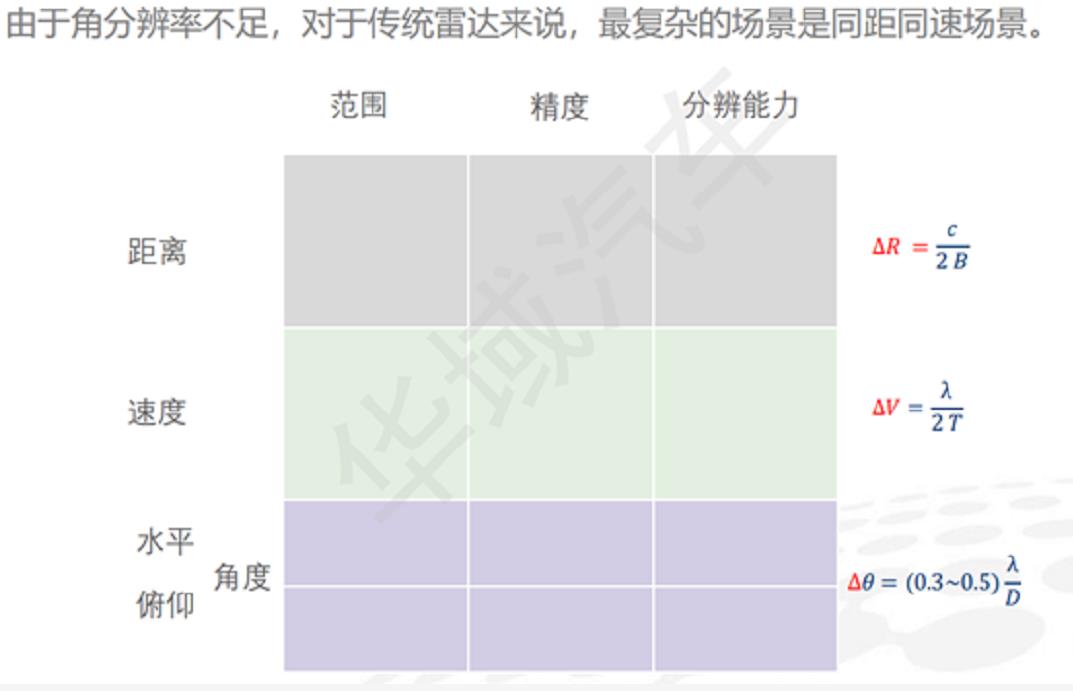
這里重點分享一下角度 因為對于毫米波雷達(dá)來說跟其他傳感器,尤其是激光雷達(dá)和視覺傳感器相比,它最大的缺陷就在于它角度分辨率不足,因為角度分辨率不足,角度精度和角分辨率都受限的情況下的話,對于傳統(tǒng)雷達(dá)來說,最復(fù)雜的一個場景就是所謂的大家經(jīng)常講的同距同速的場景,同距同速就是說兩個目標(biāo)或者多個目標(biāo),它距離也相同或者速度也相同,這兩個同時條件滿足的情況下,如果我們要準(zhǔn)確的把這個場景還原的話,我們就需要從角度上把它們能分辨開。
4D毫米波雷達(dá)角度分辨率的話,基本上跟我們天線的口徑等效完以后的口徑有關(guān)系,然后加上算法的話,我們大概可以再繼續(xù)提高2~3倍,這個口徑的話基本上跟我們的通道數(shù)是密切相關(guān)的,這也是為什么說我們4d雷達(dá)的可以進(jìn)一步的去提升這個角度的分辨率,而且就是因為雷達(dá)測到的距離和速度其實都是鏡像的速度和距離,這個點和雷達(dá)的直接的連線,它的距離,它的速度,但是這是一個g坐標(biāo)下的距離和速度,但是如果把它還原到真實的環(huán)境中,要變成一個直角坐標(biāo)系的話,它都需要再去跟角度發(fā)生關(guān)系。
比如說鏡像距離它可能要乘以一個它的夾角,才知道它到底x方向離我們車有多遠(yuǎn),y方向離我們車有多遠(yuǎn),但是因為角度的精度和分辨率都受限的話,其實這個也會導(dǎo)致我們現(xiàn)在距離和速度本身實際上不像是我們在理想條件下只能測到那么好。所以對于4d雷達(dá)來說,我們口徑大了以后,我們提高了它的精度和分辨率。
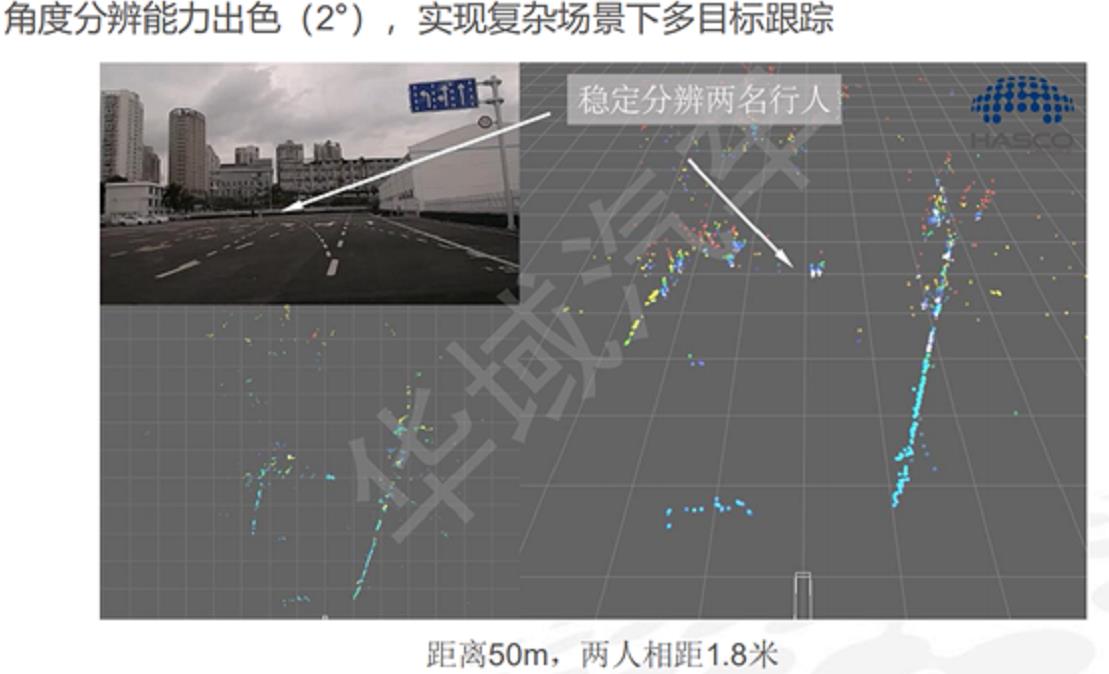
從這個圖上來看的話,在大概50米的地方站了兩個人,這兩個人他相距大概1.8米,也就是按照角度算下來的話,大概兩度的分辨率的時候,可以一直穩(wěn)定的把這兩個行人的點把它區(qū)分開。這樣的話就是說我給了我們一種可能性就是說實現(xiàn)這種復(fù)雜場景下的多目標(biāo)跟蹤,尤其是在低速的場景下,低速場景下,因為周圍的目標(biāo)也比較密集,很容易同距同速的情況。另外因為我們高分辨率,所以說實現(xiàn)這樣的話就可以輸出更多的點云。
4、更多的點云
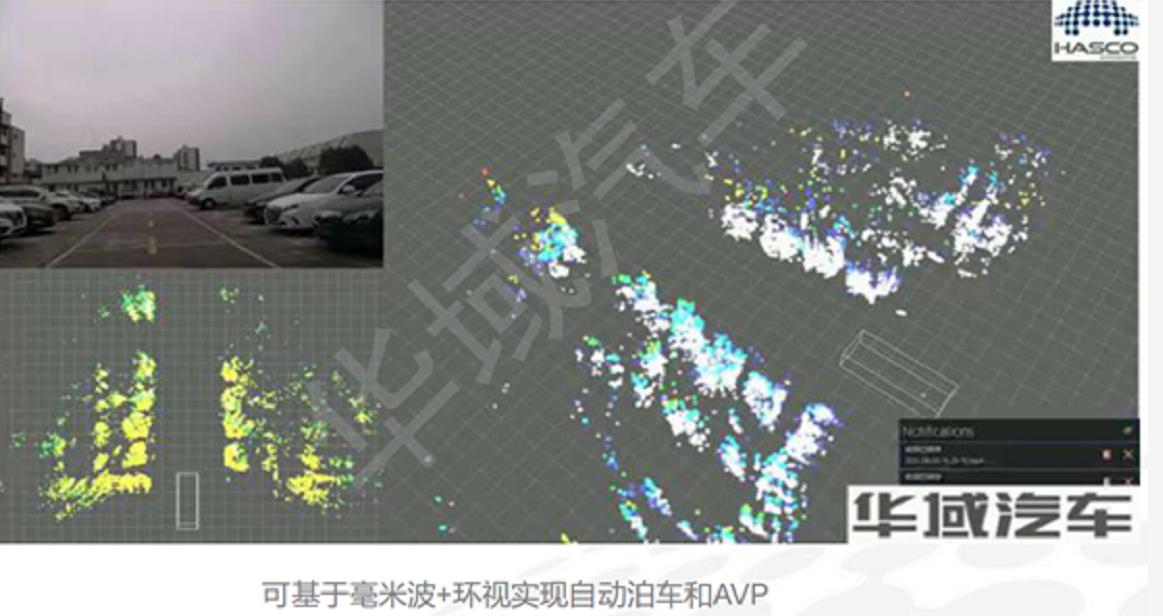
我這邊有一個圖片,這個圖跟前面的所有的相比的話,唯一區(qū)別是之前所有的視頻都是前面裝了一個4b雷達(dá)實現(xiàn)的,這圖是在前角裝了一對前腳雷達(dá)雷達(dá)實現(xiàn)的,希望基于這個能實現(xiàn)一個毫米波加環(huán)視,實現(xiàn)一個自動泊車和AVP,來把現(xiàn)在的 AVP的性能得到進(jìn)一步的提升。
四、4D毫米波雷達(dá)與激光雷達(dá)
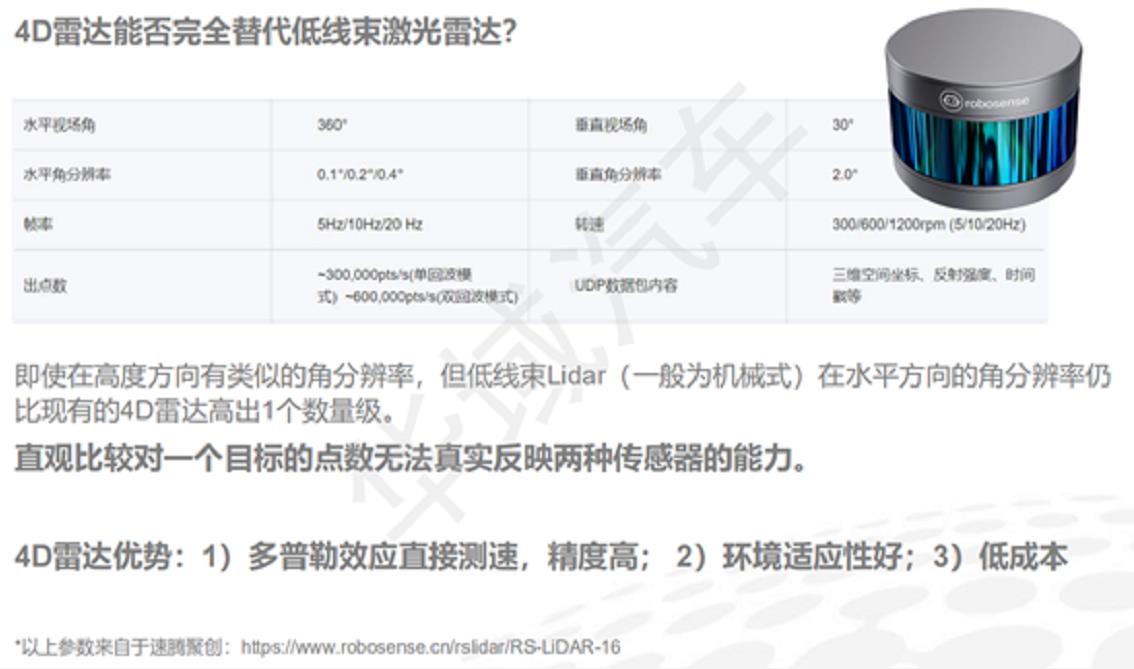
4D雷達(dá)到底能不能完全的替代低限速的激光雷達(dá)?比如說我們可能在相對來說低成本的車上,我們用4D雷達(dá)完全去替代激光雷達(dá)?
這是一個速騰官網(wǎng)上貼的就是一個16線的激光雷達(dá),就是說相對是一個低限速的激光雷達(dá),它的一些指標(biāo)可以看到它可以16線的話,它垂直視場角30度,其實跟我們4D毫米雷達(dá)是有點類似的.并且因為有16線的話,它大概可以實現(xiàn)一個垂直的角分辨率是兩度,而4d雷達(dá),比如說4片級聯(lián)的4d雷達(dá),基本上它大概也是能得到一個兩度的垂直角分辨率,但是我們再來看水平的這個角分辨率,因為低限速的激光雷達(dá)目前看起來的話以前基本上都是機(jī)械式的,雖然我們說的低限速一般也是指的它在垂直方向有多少限速,但是它水平方向它靠機(jī)械的轉(zhuǎn)軸的話,其實它是可以實現(xiàn)一個很高的分辨率的,比如說0.1度0.2度,也就是說這塊的話至少比4d類的,哪怕4片級聯(lián)的,甚至更多通道的仍然要高出一個數(shù)量級。也就是說從這一點上來說,我覺得直接去比較他們的點的話,激光雷達(dá)毫無疑問還是有更多的優(yōu)勢,但是反過來說,直觀的去對一個目標(biāo)的有多少點去直接去比較,我們認(rèn)為也不能真實的反映兩種傳感性的能力,因為到底輸出多少點,并不是傳感器唯一的一個指標(biāo)。
4D雷達(dá)至少在三個方面其實優(yōu)勢是非常的突出的:
第一個就是說不管是跟攝像頭比還是跟激光來比,我們4D雷達(dá)可以直接的通過多普的效應(yīng)直接測速,并且它的測速的精度是很高的,這就給我們跟其他傳感器得到有一個很好的互補(bǔ)。
第二個就是說它的環(huán)境適應(yīng)性很好,是因為其實就是說我們毫米波雷達(dá)它波長是毫米級,其實像我們攝像頭是可見光激光大概也是在幾百納米到1000多納米在這個量級。而毫米波因為它波長更長,所以它在穿云透霧甚至穿雨效果更好,也不受光線的影響。整體上來說環(huán)境的適應(yīng)性也是可以跟視覺和激光形成一個很好的互補(bǔ)。
第三個就是說4D雷達(dá),它所有的傳感器都是基于硅基的c模式的傳感器,所以它的成本其實是可以做得更低然后可以在成本這方面的話優(yōu)勢還是非常明顯的。
實現(xiàn)自動駕駛并不能單靠一個傳感器來實現(xiàn),而4D毫米波雷達(dá)的進(jìn)步讓自動駕駛的整個感知系統(tǒng)有了很大的提升,也進(jìn)一步解決了其他傳感器的不足。相信未來4D在動態(tài)范圍,以及與其他傳感器的融合能力上會有更好的應(yīng)用。
來源于智能汽車開發(fā)者平臺 ,作者Sean






