
導讀:最近特斯拉在汽車圈又刷了一波流量,例如新聞標題“一輛特斯拉賺十萬””利潤暴漲658%“等。其實這背后信息是特斯拉發布了2022 年第一季度,特斯拉總收入達 187.6 億美元,同比增長 81%。毛利率為 29.1%,營業利潤率為 19.2%,均創下有史以來新高,羨慕嫉妒啊。
本著Vehicle不做吃瓜群眾的精神,所以也去查看了下,到底特斯拉為啥現在這么盈利?正好看到一篇system Plus consulting的分析介紹特斯拉自動駕駛系統零部件的文章。而作為智能汽車,自動駕駛的傳感器以及域控制器不言而喻占用成本非常高,例如我們之前文章從2022 CES 看Mobileye 自動駕駛產品技術以及戰略(誰說算力是唯一標準)中透露其目標在2025年把自動駕駛全套成本降到3萬元之內,那么你想想現在成本是多少?就拿蔚來汽車40萬左右的定價,假如算BOM成本為一半20萬,就按五年后的價格來算也就是至少15%的成本。也想而知智能汽車中智能駕駛硬件的成本多高。
所以本位正好借用System Plus Consulting特斯拉自動駕駛系統零部件分析文章從特斯拉自動駕駛傳感器以及芯片看其高利潤秘訣,或許能給我們一些思考。
特斯拉本質上是基于視覺主導不帶激光雷以及高精地圖的純視覺AI自動駕駛方案。
所以其Model 3 的自動駕駛物理硬件主要為:
1、傳感器
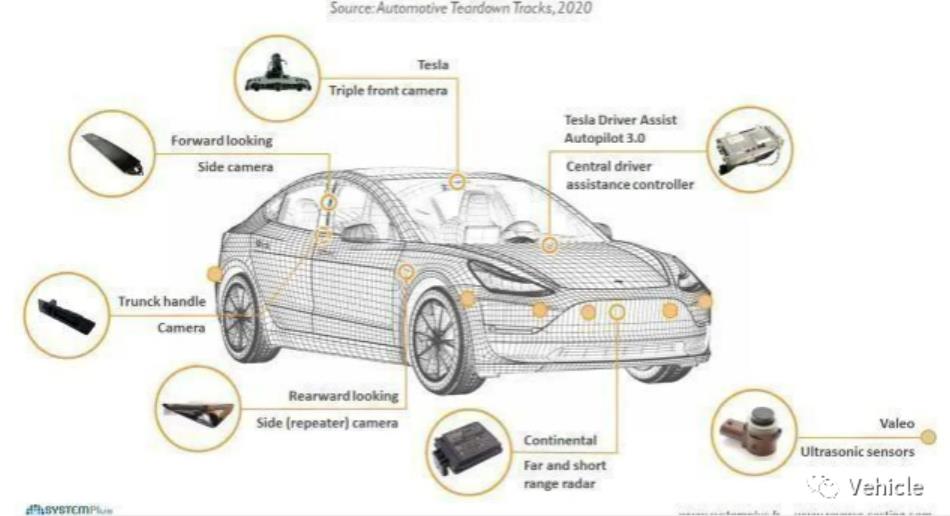
8 個攝像頭、1 個雷達和 12 個超聲波傳感器。
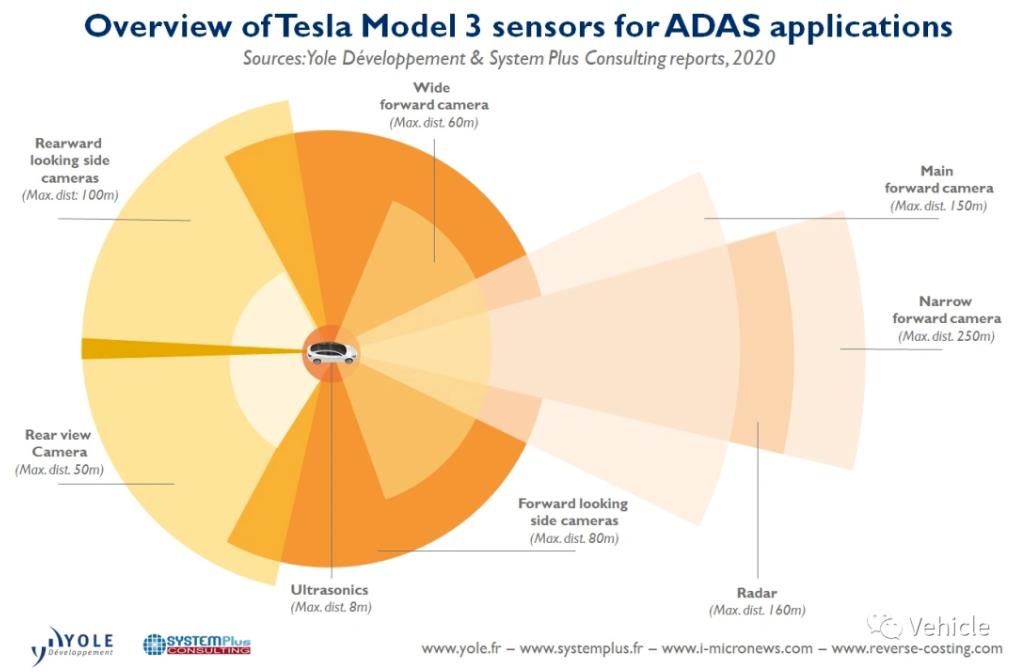
- 8 個攝像頭,可在 250 米半徑內提供 360 度全方位視野。前視覺三攝覆蓋 250 米,但視角非常窄,中距離150 米,另外一個前視是寬視覺魚眼 60米,側面前視2個攝像頭分別為80米,組成可以看到汽車周圍的環境,以及路標。其他3個攝像頭面向汽車的側面和后部,可以看到最遠 100 米的距離。
- 12 個超聲波傳感器,檢測汽車周圍 8 米半徑內的障礙物。它可以在任何速度下工作,還可以控制盲點。Autopilot 也使用聲納收集的數據來管理超車期間的自動變道。
- 1個前向毫米波雷達系統,最大探測距離160米,它以冗余波長提供有關周圍環境的額外數據,可以穿透大雨、霧、灰塵,甚至超越前車。
- 1個GPS用來定位
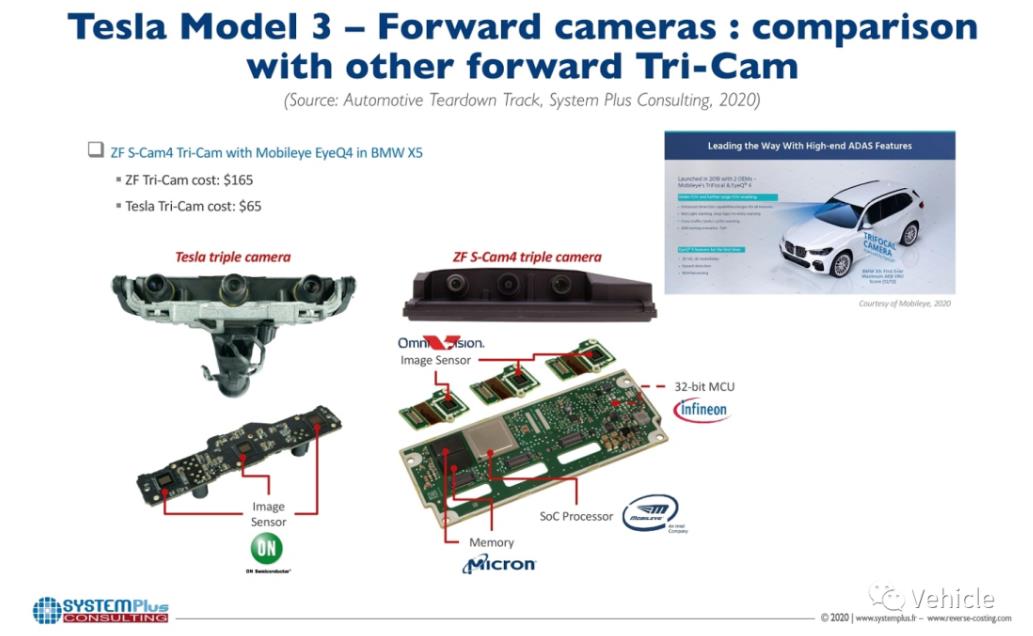
對于其前面的三攝攝像頭的設計,特斯拉將所有 CMOS 傳感器嵌入 PCB 板中,無需處理 SoC。而當前其他三攝攝像頭例如寶馬最新7系采用采埃孚S-Cam4采用 Omnivision CMOS 圖像傳感器和 Mobileye'a EyeQ4 視覺處理器。所以system Plus估計采埃孚三攝的成本為 165 美元,而特斯拉的三攝為 65 美元,特斯拉價格都快只有其1/3。超聲波雷達就不講了,聽說這個玩意兒價格太低,好像是20元人民幣以內的成本。
毫米波雷達,特斯拉采用的是大陸集團成熟的雷達模塊ARS4-B 內部是 NXP恩智浦提供的 77GHz 雷達芯片組和 32 位 MCU。用于前向碰撞警告、緊急制動輔助、碰撞緩解或自適應巡航控制 (ACC)。一個重要的元素是同時測量長距離(最長 250m,精度為 +/-0.2m)和短距離(最長 70m)、相對速度和兩個物體之間的角度。
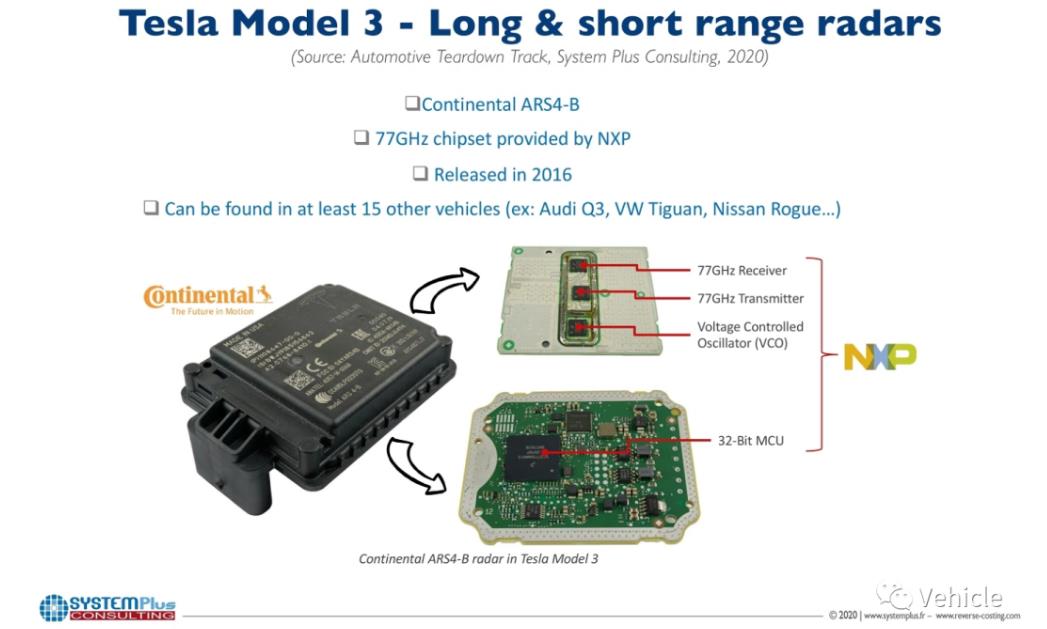
該系統由兩個電子板組成,其中包括一個 NXP Semiconductor 微控制器和一個 Broadcom 以太網收發器。射頻 (RF) 板采用不對稱結構制成,具有 PTFE/FR4 混合基板,配備平面天線。NXP 恩智浦的 77 GHz 多通道雷達收發器芯片組由四個接收器、兩個發射器和一個相關的壓控振蕩器 (VCO) 組成,用作高頻發射器和接收器。System Plus 指出,盡管包括聯發科和德州儀器在內的幾家芯片公司聲稱進入汽車雷達市場,但恩智浦和英飛凌是無可爭議的兩大巨頭。大陸是雷達模塊供應商中的主要參與者。它的 ARS4-B “至少可以在 15 種其他車輛中找到,包括 Audio Q3、大眾途觀、日產 Rogue 等,”
2、域控制器
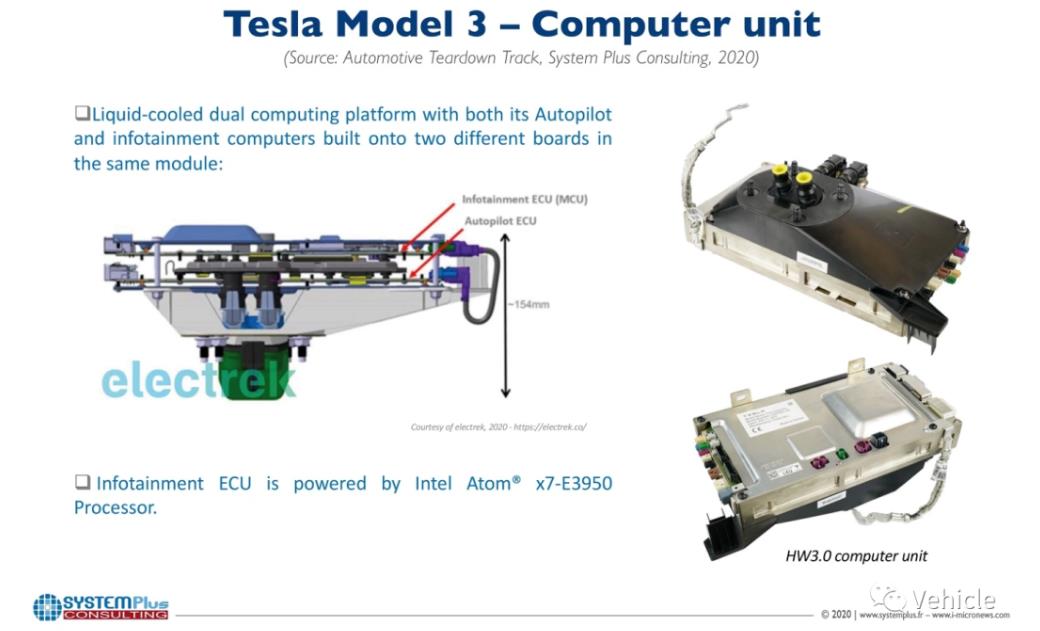
特斯拉開發了一個定制的“液冷雙計算平臺”,包含智能駕駛以及智能座艙兩部分,但他們不是在同一塊PCB版上,也就是只是把他們放在一個盒子里面。
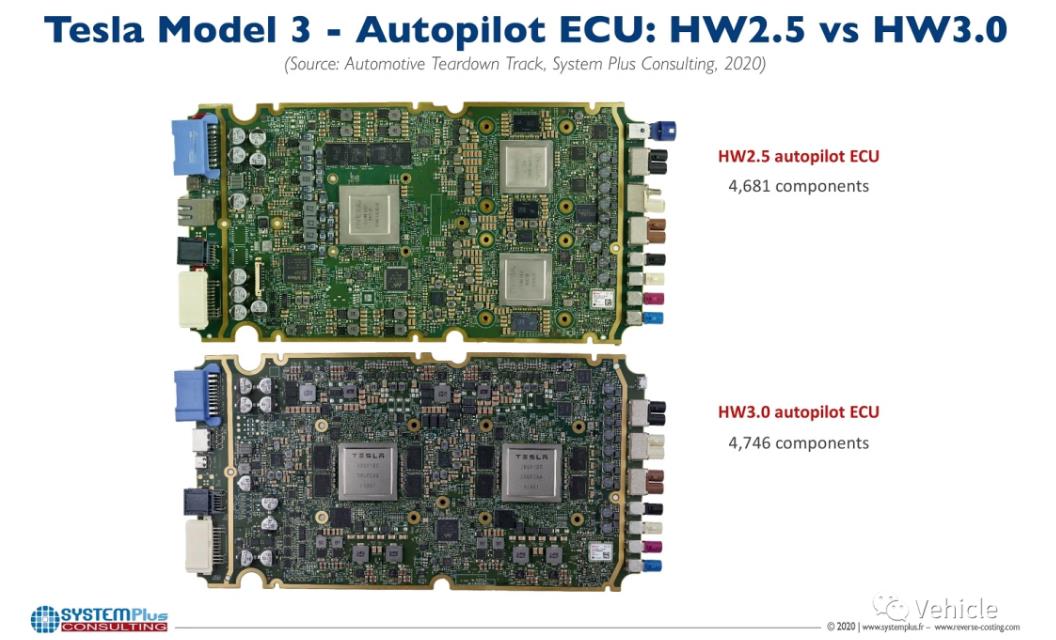
熟悉我們文章的知道,特斯拉最開始的智能駕駛用的mobileye方案,也就是硬件軟件都是別人的,在 HW2.5 中,特斯拉整合了兩個 Nvidia Parker SoC、一個 Nvidia Pascal GPU 和一個 Infineon TriCore CPU。而現在HW3.0,Tesla 集成了兩個新設計的 Tesla SoC、兩個 GPU、兩個神經網絡處理器和一個鎖步 CPU。
Tesla SoC 在 HW3 中使用的技術節點是 14nm,而 Nvidia 的 HW2.5 處理器中使用的是 16nm。處理器數量從四個 Tesla SoC 減少到兩個。
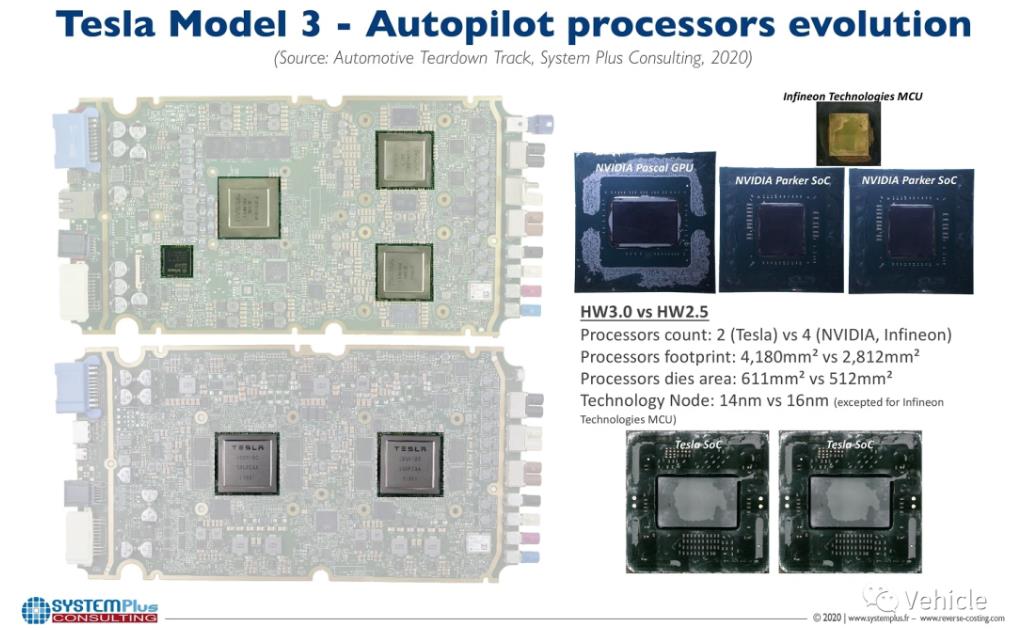
System Plus 通過測算,特斯拉的 HW2.5 由三個英偉達的芯片和英飛凌 MCU 組成,售價為 280 美元。相比之下,基于特斯拉兩款 SoC 的特斯拉 HW3.0 售價 190 美元。,HW3.0比HW2.5 主要的處理芯片就省了90美金一塊。
當然設計芯片也不是不要花錢,System Plus假設一家汽車制造商在自己的處理器上花費 1.5 億美元用于設計成本,而組件價格沒有變化且年產量為 400,000 臺,汽車公司可以在四年內收回投資。顯然看特斯拉現在的銷量不要四年就收回成本。其實芯片設計GPU時代按照Nvidia英偉達的 AI 智能汽車信仰中其實大家更多的是采用ARM架構,是不是也有路徑,另外國內在一圖概覽2022 電動汽車百人會論壇觀點過中地平線不是也可以支持大家一起做。
總結
所以從特斯拉的自動駕駛硬件系統來看,確實控制成本高手,當然他還保持較高的客戶體驗。
那么我總結下其秘訣:
總體上要有設計思維,最優的成本精準滿足客戶需求,不過度設計和過度工程。這個說起來容易,做起來難,視野上要保持前瞻,技術上要保持可拓展敏捷。
電子零部件簡化以及批量模塊化,例如攝像頭COMS圖像傳感器子零部件模塊通用化,這個其實和#整車架構模塊化原理相同,所以電子子零部件模塊化在智能汽車時代估計也是一個課題。再如其攝像頭并不自我處理而是直接發送到域控制器統一處理。
核心關鍵芯片自研,作為一家依賴智能電子的汽車主機廠,核心芯片在強勢供應商手上可不是一件很劃得來的事情,特別出現只有一兩家獨大的時候。類似于現在英偉達可能各大主機廠在他面前議價能力估計很弱。
那么看完時候想想,我們的新勢力更多的是在堆料,拼參數,國人還是有一段路要走,加油。
參考文章:
特斯拉自動駕駛硬件拆解 - Junko yoshida EE times
作者:Vehicle Pirate Jack






