
導讀:估計不少人都看到日本企業在自動駕駛等智能化方面沒有那么激進,透過2021全球自動駕駛成績單也看到豐田和日產也就四五臺車在進行路試,但是日本的品牌可也是時刻保持關注和測試。這也是日本汽車企業除了精益生產的又一優良特點,他們可能不激進的應用但他們可是保持著一定的跟蹤和研發,他們不但只賺眼前的錢而且還看長遠的發展,保持技術儲備,這一點國內很多特別是傳統企業需要學習。
最近日產在其最新技術研討會上發布了其新的智能駕駛技術方案,將采用國外著名激光雷達Luminar的激光雷達,計劃應該在2025年大批量產上市。其實日產在雷諾日產三菱聯盟當中領銜智能駕駛開發,而且日產早在2019年就應用了脫手的輔助巡航駕駛ProPilot 2.0。
所以今天我們將借用日產發布資料來看看其未來帶激光雷達的ProPilot的Nissan 帶激光雷達ProPilot的方案和Nissan 帶激光雷達ProPilot的理念,希望能給大家一些思考和啟發。
一、Nissan ProPilot的方案
首先,直接看Nissan采用什么硬件來實現其智能駕駛,目前高階智能駕駛小鵬以及特斯拉的自動駕駛方案中描述的一樣,大都都采用視覺和多種傳感器融合方案(自動駕駛的激光雷達與視覺融合感知簡析)。
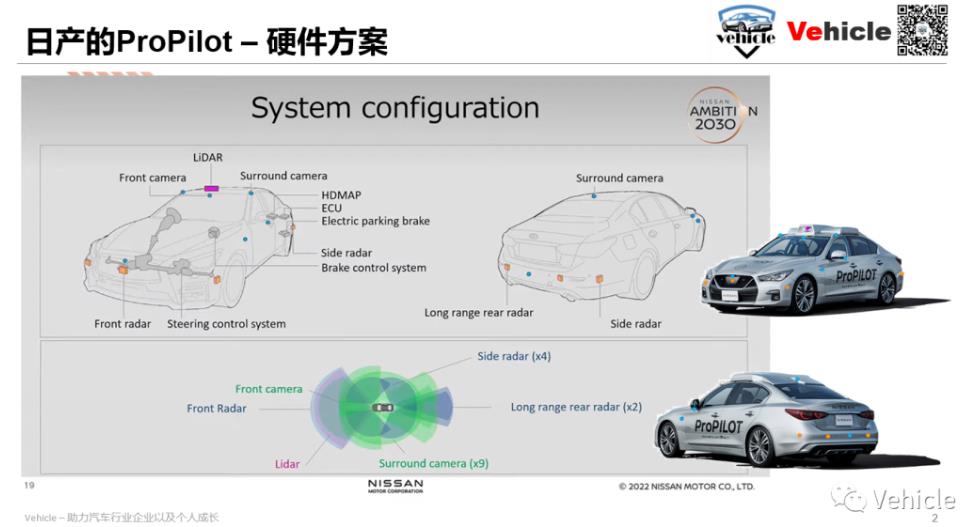
日產將要量產帶激光雷達的ProPilot采用硬件如下:
10個攝像頭:1個前置攝像頭用于探測前方視野,2個前方視野攝像頭布置于車頂左右兩側應該是和我之前講蔚來ET5,和ET7的一樣,2個后視攝像頭布置于翼子板左右兩側,1個后視布置在車頂鯊魚鰭處來識別后部環境,這6個攝像頭組成 視覺360度視野,另外4個屬于魚眼攝像頭,前后各一個,左右后視鏡各一個應該用來泊車等。
7個毫米波雷達:4個短距雷達布置車輛4個角落,前面1個長距雷達,后面2個長距雷達。這個組合方式沒有太看懂,數量很多。
1個激光雷達:激光雷達采用luminar的激光雷達,布置于前方車頂。
1個高精地圖模塊。
超聲波傳感器,沒有提到,超聲波傳感器屬于比較傳統而且價格也低廉一般用于泊車障礙的識別(當然在從特斯拉自動駕駛傳感器以及芯片看其高利潤秘訣文中也講到特斯拉在變道也使用這個傳感器)。
這種傳感器的組合和布置方式和蔚來汽車ET5,ET7的布置方式基本一致,當然蔚來前視采用雙目,日產采用單目,但布置的位置基本一致。所以根據這種硬件方式明顯可以看到未來五年市場上大部分的智能駕駛體驗應該都會像小鵬蔚來那個方向同質化- L2++。其實看完了硬件布置方案,對于其軟件方案,也很明確了基于AI人工智能的算法結構,多種傳感器冗余的感知加上高精地圖定位的智能駕駛方案。
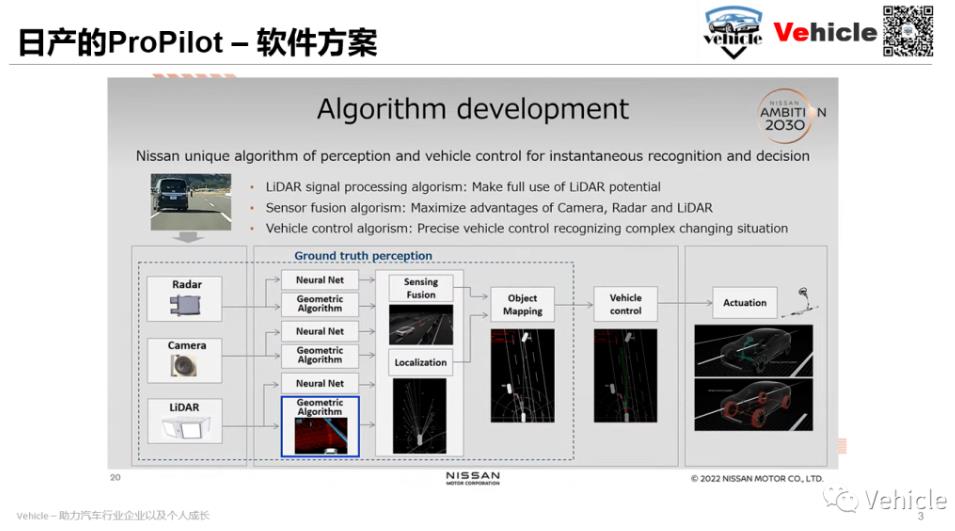
根據上圖,可以看到毫米波雷達,視像頭,激光雷達分別進行處理,然后融合進行環境整合定位。
二、Nissan ProPilot 的理念
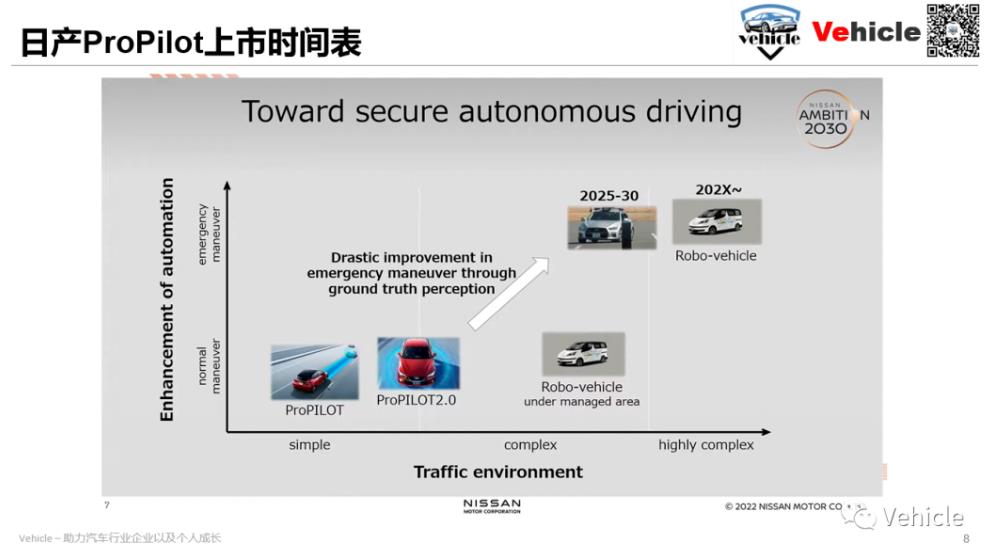
其實雖然每家主機廠采用的技術底層是一樣的,但是智能駕駛的理念不一樣,當前我們新勢力可能更加激進的進行功能的創新和體驗,但對于很多老牌主機廠他們更多帶有安全為先的理念,為什么呢?當前智能駕駛和之前汽車對于駕駛穩定和速度發展過程類似,人家品牌發展吃過太多虧也被罰過不少錢。所以日產提出基于安全的前提下的兩種方法來達到自動駕駛。
識別所有的影響安全的場景以達到100%的安全;
一步一步增強自動級別‘’
如果我們之前文章深度解讀Cruise及其自動駕駛技術:Cruise到底是誰?他的技術有什么優勢?中講的當前自動駕駛方案其實大家都花大力氣用在做長尾理論場景識別,日產也是同樣的觀點。
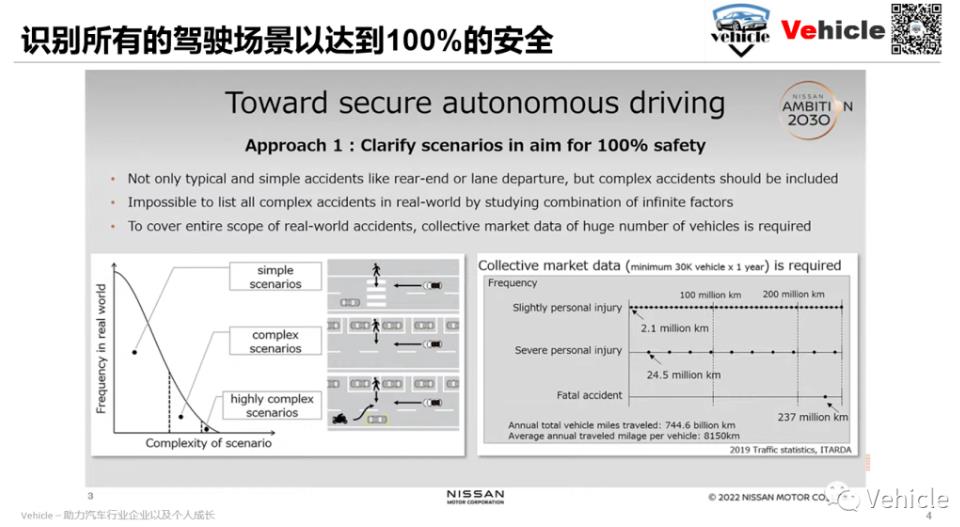
根據2019日本交通安全的數據,210萬公里行駛產生一次小傷事故,行駛2450萬公里產生一次大傷事故,23700公里產生一次死亡事故。 所以日產認為要識別所有的駕駛場景以達到100%的安全,那么日產需要3萬臺車跑一年才能采集到所有數據盡可能達到識別所有駕駛場景。
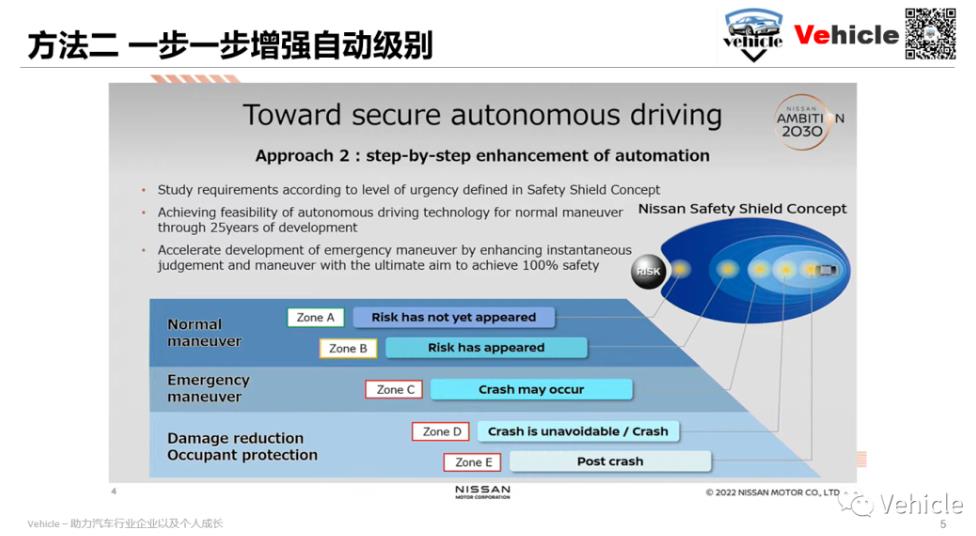
所以日產提出他的方法,根據安全盾概念的一步一步增強自動級別的方案,根據盾的級別來進行響應動作。它定義了五種區間:
Zone A 安全沒有隱患;
Zone B 安全隱患已經出現;
Zone C 可能出現碰撞;
Zone D 碰撞已經難免;
Zone E 碰撞之后;
Zone A和B的時候,主要采取人工智能識別以及V2X來處理,例如根據AI提示道路選擇道路,根據V2X信息來選擇路徑等。

Zone C 也就是可能出現碰撞的區域,日產大概講了下使用其“道路真值感知”技術,應該就是基于激光雷達的融合感知,加上其精細的運動控制來預防碰撞。
Zone D和Zone E 沒有多講,這個時候更多是現有被動安全范疇了。
回到剛才講的“道路真值感知”,就是多種傳感器優勢融合的方式。
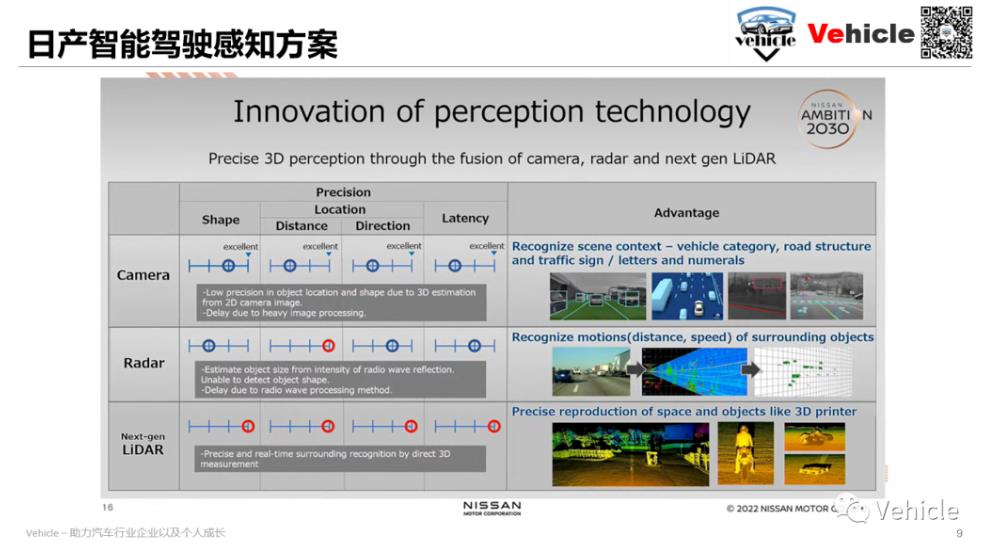
例如攝像頭對于道路物體的識別有天然優勢但他是2D數據而且需要強大的處理器處理。毫米波雷達對于運動的速度和距離識別有天然優勢但無法識別物體,另外延遲的缺點。激光雷達能夠穩健的感知環境的3D外形,但對于雨霧沙塵適應性差點。所以日產通過多種傳感器融合優勢互補來實現其“道路真值感知”。而且日產提到其將采用Luminar下一代激光雷達,一般講激光雷達的參數我們會用三個詞:
FOV也就是Field of view視場,探測角度,包括水平和垂直角度;
Detection distance 也就是探測最大距離;
角分辨率Resolution;
對于視場,除了視場的水平寬度,垂直的高度是當前大家的難點,日產表示其下一代激光雷達未來垂直視場能達到25-40度,而當前大家的垂向視場普遍都是10度以下,而現在日產和Luminar 的激光雷達的垂向視場已經達到25-30度。對于有效探測長度,日產能達到300m而當前一般都在150m,其實蔚來汽車當前采用圖達通的也差不多甚至超過300,ET7宣傳500m這個有點不厚道不講反射率。對于角分辨率當前市場上分辨率在0.25到0.1度,日產宣傳未來其激光雷達角分辨率小于0.05度。
所以多種融合,通過對動態交通的3D跟蹤,長距精準感知,SLAM動態即時定位與構圖來使感知穩健。
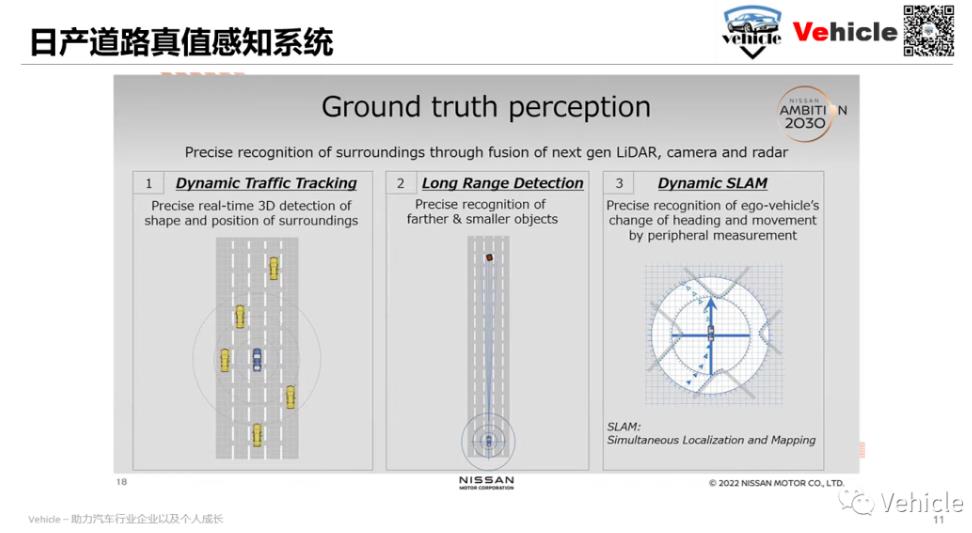
其中SLAM也就是當前小鵬的學習泊車采用的技術,那么估計這項配置未來也在各家變成標配了。
三、總結
日產的這套ProPilot硬件布置方案和蔚來的基本一致,當然目前還是試驗車型,還沒有看到量產車型,但這里確實體現民族自信了哈,以前國內造車基本參考國外車型,現在國外汽車造車特別是智能方面都會參考國內車型。
另外對于AI處理器方面,這次沒有涉及,其實對于AI處理器硬件方面的供應鏈也非常多了,除了智能自動駕駛六大主流車載芯片及其方案的其實當前很多選擇例如NXP恩智浦,瑞薩,TI 德州儀器,安霸都有。
所以隨著市場走量主機廠例如日產等的應用,可以預測L3以下的自動駕駛硬件方案以及相關體驗定型在2025年左右。小鵬在百人會(一圖概覽2022 電動汽車百人會論壇觀點)上講的小鵬在智能駕駛領先友商2-3年也是完全中肯。未來L3以及以上自動駕駛方案還處于戰國時代多種路徑和方法還有待跟蹤。
參考文章:日產最新技術研討會PPT - 日產
作者:Vehicle Pirate Jack






