
導(dǎo)讀:興趣是最好的老師,而項(xiàng)目就是老師手里的教鞭。從圖商的宣傳材料里,陸陸續(xù)續(xù)了解到高精地圖的一些知識,自以為二三好友間吹吹牛逼已經(jīng)足夠了。未曾想,近期手里的一個項(xiàng)目要對接專業(yè)圖商,采集全場景高精地圖,而我需要輸出本項(xiàng)目對高精度地圖采集的技術(shù)要求、驗(yàn)收指標(biāo)。
在教鞭的鞭笞下,我又化身學(xué)生,認(rèn)真研讀每份高精地圖專業(yè)報道,虛心聆聽業(yè)內(nèi)專業(yè)人士的耐心介紹。并將所學(xué)所思總結(jié)下來,一來可以加深自身印象,二來以期給有緣人一些參考。因此,本文就介紹下自動駕駛的“天眼”--高精地圖的一些基礎(chǔ)概念。

1、定義
一種精度可達(dá)厘米級(傳統(tǒng)電子導(dǎo)航地圖精度為米級),提供元素更加詳細(xì)、屬性更加豐富、維度更高、更新頻率更快的高精度、高豐富度、高維度、高新鮮度的電子地圖。一種可以輔助實(shí)現(xiàn)更可靠的融合高精定位功能,提供超視距環(huán)境感知能力以及提供車道級別最優(yōu)路徑規(guī)劃的電子地圖。
單車上的融合感知系統(tǒng),受限于傳感器物理特性以及惡劣氣候影響,只能做到可見即可得,無法獲得超視距的感知,也就無法實(shí)時掌握極具中國特色的道路特點(diǎn)和交通狀況。因此,業(yè)界除了特斯拉(馬斯克曾說:高精地圖是一個很糟糕的想法)以外基本達(dá)成共識,高精地圖是L3以上自動駕駛系統(tǒng)必備武器,堪比二郎神楊戩的天眼。
有一個形象的比喻:裝備高精地圖的自動駕駛系統(tǒng)仿佛一個當(dāng)?shù)亻_了20年出租的老師傅,不僅車技好,腦子里還有一張當(dāng)?shù)鼗畹貓D。而沒有高精地圖的自動駕駛系統(tǒng),就像是一個初來乍到的外地老師傅,雖車技了得,但對當(dāng)?shù)卮蠼中∠飳?shí)際情況一無所知。
2、組成
高精地圖需要存儲和呈現(xiàn)車輛環(huán)境數(shù)據(jù)和交通運(yùn)行數(shù)據(jù),有靜態(tài),有動態(tài)。如果都放在一張圖層,既不利于制作,也不利于使用。因此標(biāo)準(zhǔn)化的分層就顯得尤為重要,每一層體現(xiàn)一種環(huán)境要素或交通要素,所有圖層疊加后形成可用的高精地圖。
而各國標(biāo)準(zhǔn)化組織或協(xié)會也一直在致力于這方面的工作,有歐洲的4層分層模型(靜態(tài)、準(zhǔn)靜態(tài)、準(zhǔn)動態(tài)、動態(tài)),有中國提出的7層分層模型(道路層、交通信息層,道路-車道連接層、車道層、地圖特征層、動態(tài)感知層、決策支持層)。本文不去深究不同模型的差異,僅從利于邏輯理解的角度介紹業(yè)界比較認(rèn)可的分層邏輯。
目前自動駕駛?cè)?nèi)比較公認(rèn)的高精地圖自下而上可以分成兩個大圖層,靜態(tài)數(shù)據(jù)層和動態(tài)數(shù)據(jù)層。
一、靜態(tài)數(shù)據(jù)層
靜態(tài)數(shù)據(jù)層自下而上又可細(xì)分為車道模型、道路部件、道路屬性三個矢量子層,以及一個道路環(huán)境特征子層。
車道模型,用于精確描述車道間拓?fù)潢P(guān)系,包括車道基準(zhǔn)線、車道連接點(diǎn)、車道交通類型、車道功能類型。車道基準(zhǔn)線可以體現(xiàn)不同車道間的關(guān)聯(lián)關(guān)系,是局部車道級路徑規(guī)劃的基礎(chǔ);車道連接點(diǎn)可以體現(xiàn)不同路段車道間連接關(guān)系,是全局車道級路徑規(guī)劃的基礎(chǔ);車道交通類型定義有普通車道、行車道、超車道、輔助車道等類型。車道功能類型定義有公交車道、HOV車道、潮汐車道等類型。
道路部件,主要分為路面標(biāo)線類和道路設(shè)施類。路面標(biāo)線類包括路面橫縱向標(biāo)線、標(biāo)線類型,標(biāo)線顏色、標(biāo)線材質(zhì),清晰程度等。道路設(shè)施類包括收費(fèi)站位置、綠化帶位置、防護(hù)欄位置、涵洞限高、橋梁限重、地標(biāo)性建筑位置等。
道路屬性,包含車道類型的屬性和路側(cè)呈現(xiàn)設(shè)備屬性。車道類型屬性包含車道數(shù)量、類型、坡度、曲率、航向、高程、側(cè)傾等信息;路側(cè)呈現(xiàn)設(shè)備屬性包含交通信號燈位置、交通標(biāo)志位置及含義、興趣點(diǎn)(斑馬線)位置及含義等。
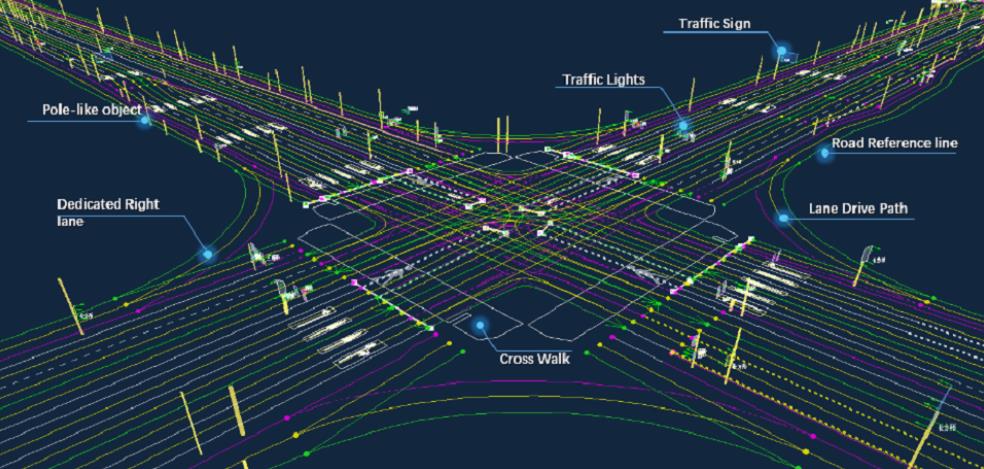
道路環(huán)境特征,用于記錄具備獨(dú)特環(huán)境特征的目標(biāo)圖層,比如交通信號燈、交通標(biāo)志、地標(biāo)性建筑等。通過采集的激光點(diǎn)云和相機(jī)圖像數(shù)據(jù)進(jìn)行特性提取,并打上特定的標(biāo)簽,從而生成一張道路環(huán)境特征圖層。用于支持自動駕駛車輛實(shí)時感知結(jié)果的特征匹配,從而完成車輛實(shí)時融合精準(zhǔn)定位。
二、動態(tài)數(shù)據(jù)層
動態(tài)數(shù)據(jù)層基于萬物互聯(lián)的V2X技術(shù),實(shí)時獲取交通運(yùn)行數(shù)據(jù)、交通管理數(shù)據(jù)及人、車的實(shí)時運(yùn)動數(shù)據(jù)。因此由下往上可分為交通運(yùn)行數(shù)據(jù)層、交通管理數(shù)據(jù)層及高動態(tài)運(yùn)動層。
交通運(yùn)行數(shù)據(jù)包含路口紅綠燈實(shí)時狀態(tài),道路擁堵情況、通行區(qū)域天氣情況、前方可用充電站、停車場的實(shí)時狀態(tài)等。通過V2I/V2N技術(shù),車載終端OBU從路側(cè)基礎(chǔ)設(shè)施單元RSU或交管部門大數(shù)據(jù)云平臺實(shí)時獲取。
交通管理數(shù)據(jù)包含由于道路施工、交通事故、交通擁堵而產(chǎn)生的臨時交通標(biāo)志和交通控制數(shù)據(jù),車輛一方面可以通過V2I/V2N技術(shù)實(shí)時獲得交通管控?cái)?shù)據(jù),一方面通過自身感知設(shè)備將遇到的臨時交通管控?cái)?shù)據(jù)上報圖商大數(shù)據(jù)平臺,圖商基于此進(jìn)行交通管理數(shù)據(jù)層的動態(tài)更新。
高動態(tài)數(shù)據(jù)層主要包含移動物體數(shù)據(jù)、車輛行駛狀態(tài)、車輛操作數(shù)據(jù)。移動物體數(shù)據(jù)包含行駛路線上物體的位置,包括車輛、行人、三輪車、電瓶車等;車輛行駛狀態(tài)包括速度、方向等;車輛操作數(shù)據(jù)包括啟動、加速、減速、轉(zhuǎn)彎、換擋、加速等。基于V2V技術(shù),車輛之間可以實(shí)時完成高動態(tài)數(shù)據(jù)的交互。
3、作用
“天眼”的定義及基本組成均已呈現(xiàn),下面自然而然的輪到高精地圖可以解決的痛點(diǎn)及在其中發(fā)揮的作用。而冥冥之中早有安排,高精地圖在自動駕駛幾大模塊中均有不俗的降妖表現(xiàn)。
一、感知
目前自動駕駛傳感器的家族越來越壯大,單個的戰(zhàn)力也越來越強(qiáng)大,但仍沒有一種或幾種融合能解決全場景的感知需求。不是受限硬件物理特性影響,就是受限惡劣氣候的影響。
(1)在大雪、暴雨、霧霾天氣下,視覺及激光雷達(dá)基本失效,毫米波雷達(dá)倒是可以繼續(xù)完成移動障礙物的識別、追蹤、聚類,但僅憑它不足以撐起L3以上自動駕駛系統(tǒng)的全部功能;
(2)在車道線、斑馬線等交通標(biāo)線磨損,交通指示牌損壞,紅綠燈繁雜的路口,單純的視覺系統(tǒng),也將很難準(zhǔn)確完成識別。
而融合高精度地圖的感知系統(tǒng),可以突破傳感器的性能邊界,提供全場景,全氣候下的超視距感知。通過高精地圖,車輛能夠提前了解當(dāng)前位置前方可能的道路情況,動態(tài)調(diào)整傳感器的功能,從而降低對于傳感器的性能要求,合理分配計(jì)算資源。公開資料總結(jié)的高精地圖對感知提升主要有三方面。
(1)在交通信號等識別方面,有了高精地圖,感知系統(tǒng)只用在當(dāng)前車道前方有交通信號燈的時候才啟用對應(yīng)的傳感器及識別的深度學(xué)習(xí)算法,這樣不僅可以節(jié)省計(jì)算資源,提高識別的準(zhǔn)確率,而且可以提高感知硬件的整體壽命;
(2)在車道線識別方面,高精地圖能夠提供車道數(shù)、車道寬度等豐富的信息,對于車道線磨損、模糊不清等情況,通過重投影補(bǔ)齊車道線,可以提高車道線的識別能力;
(3)在復(fù)雜場景感知方面,通過先驗(yàn)信息,提升相應(yīng)的感知能力。比如即將行駛到高精地圖標(biāo)注的斑馬線“興趣區(qū)”時,感知系統(tǒng)將啟用斑馬線行人檢測深度學(xué)習(xí)模型,提高各類姿態(tài)行人的識別率,同時合理的對車輛的行駛狀態(tài)進(jìn)行控制。
二、定位
單一定位源無論從系統(tǒng)可靠性還是功能安全的角度考慮,都無法滿足自動駕駛大規(guī)模量產(chǎn)落地的要求。而基于多傳感器的融合定位是大勢所趨,而高精地圖似乎成了融合定位實(shí)現(xiàn)的最后一塊拼圖。
GNSS+IMU+RTK受遮擋等影響,無法實(shí)現(xiàn)全場景準(zhǔn)確定位;基于激光或相機(jī)的特征匹配地位,受限于道路上重復(fù)的特征及傳感器本身的物理特性,也無法實(shí)現(xiàn)全場景準(zhǔn)確定位。而引入高精地圖的融合定位,可以完美解決絕大部分的Corner Case。
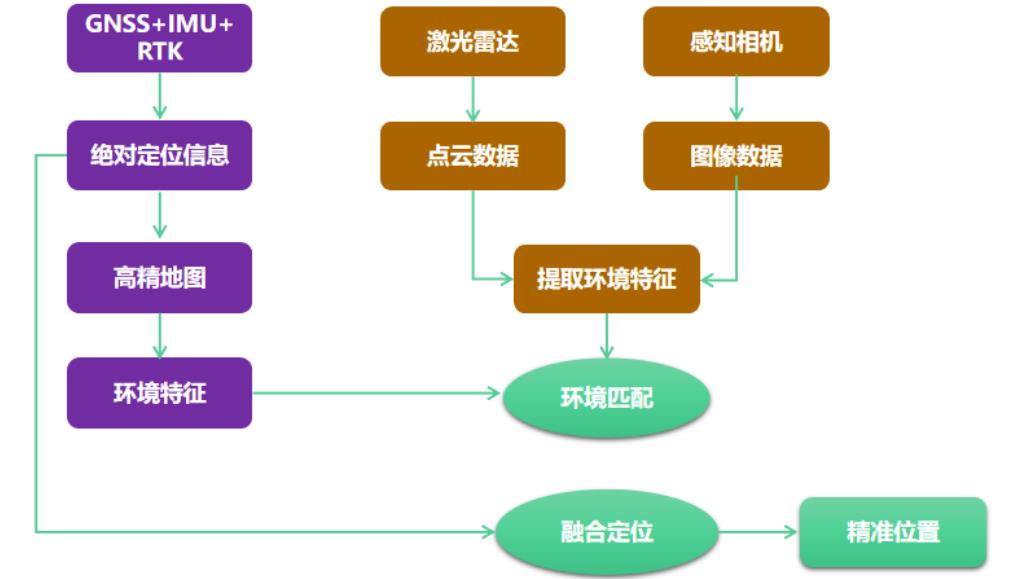
首先通過GNSS+IMU+RTK獲得絕對定位,并從高精地圖中導(dǎo)入此位置的環(huán)境特征圖層。通過激光或相機(jī)掃描識別的特征與高精地圖中記錄的環(huán)境特征進(jìn)行匹配融合,從而獲取車輛在當(dāng)前場景下更加準(zhǔn)確的定位。此融合一來可以獲得更加準(zhǔn)確的定位,二來在GNSS衛(wèi)星被遮擋(隧道),IMU航跡推算誤差不斷累積情況下,通過高精地圖環(huán)境特征匹配,既可以獲得更加可靠的定位結(jié)果,又可以實(shí)現(xiàn)對其它傳感器誤差的糾偏。三來在環(huán)境特征重復(fù)度特別大的場景下(高速公路),通過GNSS+IMU+RTK實(shí)時獲取當(dāng)前位置的高精地圖,可以避免環(huán)境特征的誤匹配。
三、預(yù)測
高精地圖也可以輔助對道路上其他車輛的軌跡預(yù)測。例如如果前方某輛車行駛在實(shí)線車道內(nèi),可以預(yù)測該車輛的變道可能性很小;如果前方車輛行駛在最右側(cè)車道,且前方有高速出口,可以預(yù)測車輛有可能駛出高速等。
四、決策規(guī)劃
對于如下環(huán)島場景,光靠自身感知系統(tǒng),是沒有辦法理解其交通規(guī)則,作出合理的決策和控制。而對于有特殊交通規(guī)則的道路(限時公交專用車道、潮汐車道等),光靠交通標(biāo)識牌的識別,一來沒有辦法提前進(jìn)行路徑規(guī)劃,二來存在錯誤的交通規(guī)則的識別。
高精地圖通過賦予自動駕駛系統(tǒng)更豐富的駕駛經(jīng)驗(yàn),在合理的全局路徑規(guī)劃及智能化的局部路徑規(guī)劃下,大幅提升單車通行效率,交通運(yùn)營效率。

五、仿真訓(xùn)練
高精地圖與虛擬仿真技術(shù)的結(jié)合,通過極大提高場景構(gòu)建的效率,可以推動自動駕駛仿真的快速落地、普及。基于高精地圖的豐富道路元素信息,使用三維建模軟件可以實(shí)現(xiàn)靜態(tài)還原交通基礎(chǔ)設(shè)施與周邊環(huán)境。同時利用路采數(shù)據(jù),在交通參與要素符合邏輯的情況下自動化生成動態(tài)場景元素。
4、采集方式
我國國土疆域遼闊,城市數(shù)量豐富且道路狀況極其復(fù)雜。如果只靠具有高精地圖采集資質(zhì)圖商有限數(shù)量的專業(yè)采集車,地圖制作的數(shù)量注定有限,地圖更新的頻率注定較低(某頭部廠商采用專業(yè)采集車3個月才能更新一次全國高速公路及城市快速路的高精度地圖)。鑒于此,越來越多的圖商采用專業(yè)采集+眾包采集相結(jié)合的方式。
專業(yè)采集即采用圖商造價百萬的測繪車輛,上面全副武裝的傳感器套件,包括高精度組合導(dǎo)航、高線束激光雷達(dá),高像素感知相機(jī)。在標(biāo)定完成、時間同步完成,運(yùn)動補(bǔ)償完成之后,就釋放它的韁繩,讓它馳騁在祖國的大好山河,去記錄一切。
眾包采集即利用群眾的力量,不管你是BBA還是國產(chǎn)四小龍,都給我一起發(fā)功。用那10米精度的GNSS,稍顯模糊的相機(jī),誤報率有點(diǎn)高的毫米波雷達(dá),去窮游祖國。將這些帶有定位信息的車輛行駛軌跡、攝像頭圖像數(shù)據(jù),毫米波雷達(dá)目標(biāo)數(shù)據(jù)通過車端聯(lián)網(wǎng)設(shè)備上傳圖商云端平臺,圖商通過AI技術(shù)進(jìn)行處理,提取道路的結(jié)構(gòu)化信息。
專業(yè)采集精度高,數(shù)量少,因此適合場景地圖的初始繪制。眾包采集精度低,數(shù)量多,因此適合后續(xù)地圖的高頻更新。
前面詳細(xì)介紹了高精地圖作為超視距傳感器在自動駕駛各模塊中的作用及其理想的分層模型。但落實(shí)到女領(lǐng)導(dǎo)分配的實(shí)際項(xiàng)目任務(wù)上,我還是要確認(rèn)找哪家圖商來承接我的需求以及我們對圖商期望的地圖輸出格式及輸出內(nèi)容。接下來就從當(dāng)前有資質(zhì)的圖商及高精度地圖輸出格式兩方面來展開介紹。
5、高精地圖采集資質(zhì)
調(diào)研下來,發(fā)現(xiàn)高精地圖圈遵循的還真不是帥氣多金就可以為所欲為的社會法則。在這里,崇尚的是一紙文憑,即使你衣衫襤褸、食不果腹,但只要你拿出“院士”的聘任文書,你就依然是科技界、商界、政界大佬們的座上賓。而對于高精地圖圈來說,這一紙文憑就是導(dǎo)航電子地圖甲級資質(zhì)。
國家地理信息關(guān)乎國防安全,涉及國家秘密,因此在中國從事高精地圖測繪活動就需要獲取導(dǎo)航電子地圖甲級資質(zhì)。而甲級資質(zhì)在人員規(guī)模、儀器設(shè)備、保密管理、作業(yè)標(biāo)準(zhǔn)等考核指標(biāo)方面都有比較高的門檻。以人員規(guī)模舉例,需要滿足具備100人及以上(含注冊測繪師5人,其中高級10人,中級20人)測繪及相關(guān)專業(yè)技術(shù)人員的條件。
而大多數(shù)傳統(tǒng)主機(jī)廠和初創(chuàng)地圖企業(yè)難以滿足上述要求,即使?jié)M足了也只是具備了人和,你還要靜待天時和地利。從2001年四維圖新獲得第一張甲級資質(zhì),到2021年的這20年時間里,9600萬平方公里嗷嗷待高精測繪的土地上僅誕生了28家獲得高精地圖甲級測繪資質(zhì)的企業(yè)。而這28家中除去事業(yè)單位、傳統(tǒng)圖商,所剩科技型初創(chuàng)企業(yè)寥寥無幾,這與國外高精地圖采集產(chǎn)業(yè)的繁榮、高速發(fā)展形成鮮明對比。
通過多方打聽,匯總了國內(nèi)具有高精地圖甲級測繪資質(zhì)的企業(yè)信息如下表,而我所能做的就是找一家情投意合的商談后續(xù)采集的工作。

6、高精地圖數(shù)據(jù)格式
高精地圖目前最主流的通用格式規(guī)范有OpenDRIVE和NDS。
一、OpenDRIVE
OpenX系列標(biāo)準(zhǔn)是ASAM(Association for Standardization of Automation andMeasuring Systems,自動化及測量系統(tǒng)標(biāo)準(zhǔn)協(xié)會)為完整描述一個仿真測試場景而制定,包括OpenDRIVE、OpenCRG和OpenSCENARIO三個標(biāo)準(zhǔn)。其中OpenDRIVE主要用于描述仿真測試場景的靜態(tài)部分(道路幾何形狀、道路拓?fù)浣Y(jié)構(gòu)、交通標(biāo)識等);OpenCRG主要用于描述仿真測試場景的表面細(xì)節(jié)(道路坑洼等);OpenSCENARIO主要用于描述仿真測試場景的動態(tài)部分(人、車等移動障礙物的行為等)。
OpenDRIVE是德國制定的國際通用的高精地圖規(guī)范,使用XML格式文件來描述路結(jié)構(gòu),自動駕駛系統(tǒng)可通過讀取XML文件構(gòu)造路網(wǎng),座艙域可通過進(jìn)一步渲染后通過顯示屏展示給用戶。OpenDRIVE目前最新版本為2021年8月發(fā)布的V1.7,除了完善仿真場景的需求,還豐富了自動駕駛對高精地圖的額外需求。國內(nèi)玩OpenDRIVE最溜的非百度Apollo莫屬,不僅消化吸收,還基于自己的需求做了部分改動和擴(kuò)展,已經(jīng)在國內(nèi)有了專屬代號Apollo OpenDRIVE。
OpenDRIVE通過道路參考線(Reference Line),車道(Lanes)、車道段(Section)、物體(Objects)、交通標(biāo)志(Road Signals)、標(biāo)高(Elevation)、交叉口(Junction)等元素來描述道路結(jié)構(gòu)。
(1)道路參考線。每條道路必須定義且只定義一條道路參考線,道路參考線可以定義到道路中心,也可以有側(cè)向偏移。道路參考線只反映道路在水平投影面的走向,不包括坡度、起伏等特征。為保證在蜿蜒曲折的道路中參考線沒有斷口,道路參考線可由直線、螺旋線、三次多項(xiàng)式參數(shù)方程等幾何形狀組合。道路參考線的ID通常定義為0。
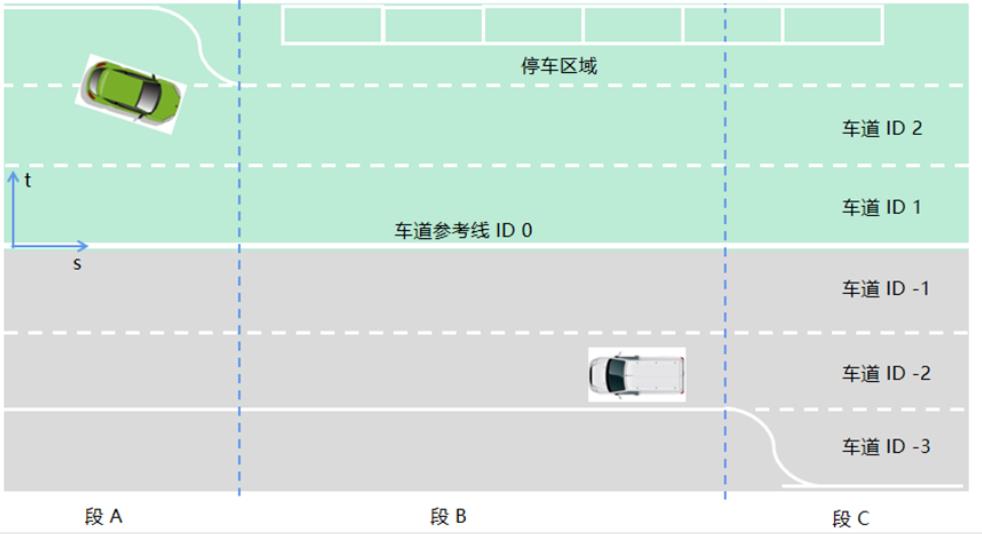
(2)車道。每條道路可設(shè)置多條車道。車道的屬性包括寬度、類型(行車道、超車道、停車道、自行車道等)、材質(zhì)(通過摩擦系數(shù)表征)、限速級別、路權(quán)(不同時間段可通行車輛類別信息)等。車道通過ID區(qū)分,道路參考線坐標(biāo)系s軸正方向左側(cè),ID依次遞增,右側(cè)依次遞減。當(dāng)?shù)缆穮⒖季€ID定義為0時,左側(cè)車道ID依次為1、2、3、……,右側(cè)車道ID依次為-1、-2、-3、……。
(3)車道段。根據(jù)車道數(shù)變化(增多或減少)、車道虛實(shí)線變化,柵欄有無等的原則,將道路切分成一段段,且按照升序來定義,如上圖的段A/B/C。
(4)物體。通過拓展、定界以及補(bǔ)充道路走向從而對道路產(chǎn)生影響的項(xiàng),最常見的例子包括停車位、人行橫道、交通護(hù)欄、限高和隧道等。
(5)道路標(biāo)志。用來控制和規(guī)范道路交通所設(shè)的路標(biāo),包括交通信號燈、各類交通標(biāo)牌等。
(6)標(biāo)高。包括縱向坡度(沿行駛方向的高低起伏)、橫向坡度(轉(zhuǎn)彎處內(nèi)外側(cè)坡度有明顯差異)。
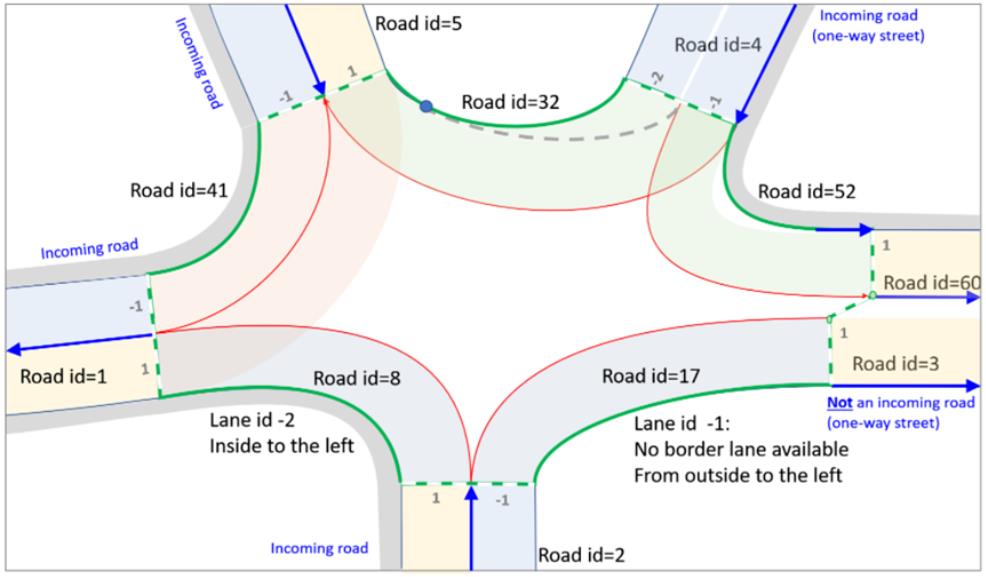
(7)交叉口。當(dāng)有三條及以上道路相交、無法清楚描述道路的連接關(guān)系時,通過在交叉口中增加虛擬路,來連接可通行方向。路口由三個部分組成:來路(Incoming Road)、去路(Outgoing Road)和連接路(Connecting Road)組成。來路為進(jìn)入路口的道路,可以有不止一條;去路為離開路口的道路,可以有不止一條;來路可同時作為去路,連接路作為來路和去路之間連接。如下圖所示,一條來路可以對應(yīng)多條連接路,而每條連接路都只連接一條來路和一條去路,這樣就明確了路口處道路的連接關(guān)系。
(8)坐標(biāo)系。在OpenDRIVE里定義了三種坐標(biāo)系,來描述道路元素之間的相對關(guān)系。包括慣性x/y/z坐標(biāo)系(Inertial System),參考線s/t/h坐標(biāo)系(Reference Line System)和局部u/v/z軸坐標(biāo)系(Local System)。
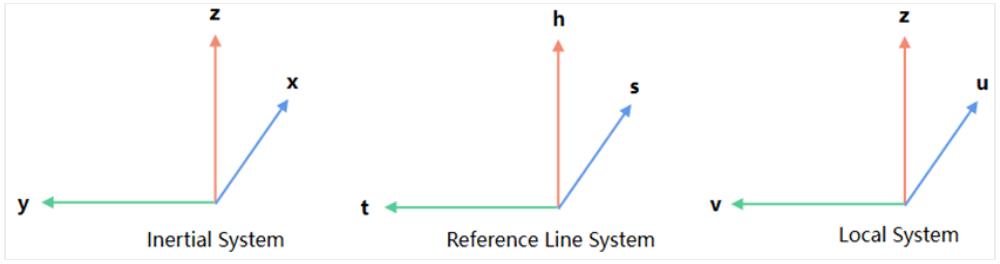
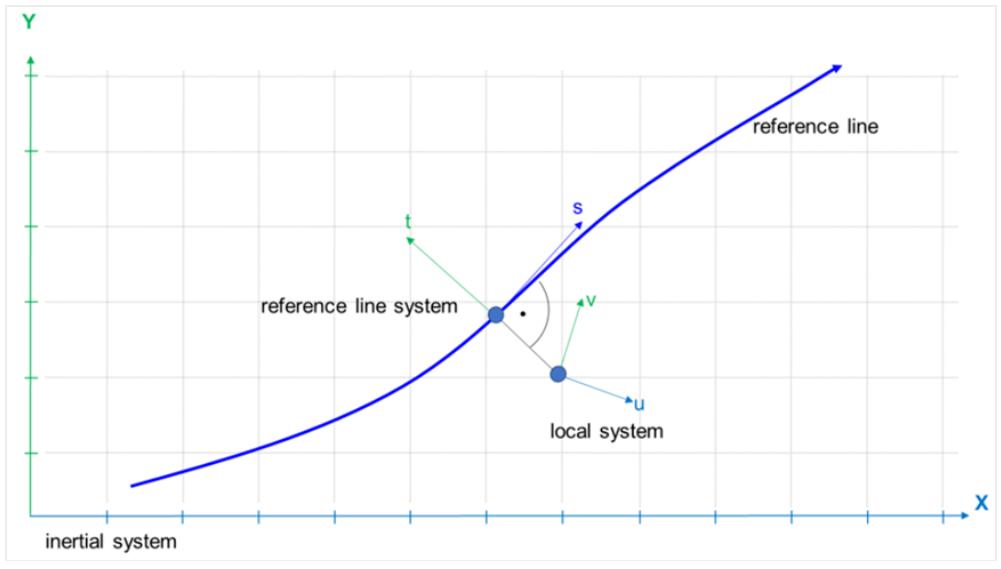
對局部坐標(biāo)系位置和方位的確定將相對于參考線坐標(biāo)系來進(jìn)行。對參考線坐標(biāo)系位置與方向的確定則相對于慣性坐標(biāo)系來開展,如下圖展示的各坐標(biāo)系關(guān)系。
慣性坐標(biāo)系遵照右手法則,在繪圖平面內(nèi),x指向右方,y指向上方,z垂直指向平面外。
參考線坐標(biāo)系同樣同樣遵照右手法則。s方向跟隨著參考線的切線方向,t方向與s方向成正交,h由右手法則確定。參考線總是位于由慣性坐標(biāo)系定義的x/y平面里。
局部坐標(biāo)系同樣遵照右手法則。u 向前與s保持匹配,v 向左與t保持匹配 ,z按照右手法則確定。
二、NDS
NDS(NavigationData Standard,導(dǎo)航數(shù)據(jù)標(biāo)準(zhǔn))是由汽車制造商(寶馬、大眾、戴姆勒等)、系統(tǒng)集成商、地圖提供商、服務(wù)提供商等聯(lián)合開發(fā)的一套地圖數(shù)據(jù)全球標(biāo)準(zhǔn)。NDS采用了數(shù)據(jù)庫技術(shù)存儲地圖數(shù)據(jù),在兼顧性能和功能的基礎(chǔ)上,可以比較好地解決地圖增量更新、數(shù)據(jù)安全、數(shù)據(jù)可靠的問題。
早先基于嵌入式操作系統(tǒng)開發(fā),不具備數(shù)據(jù)庫環(huán)境,因此幾乎所有的電子地圖存儲都采用了文件存儲方式,而文件存儲中使用大量了地址偏移,計(jì)數(shù)等。地圖的增量更新將引起一系列增刪操作,文件的結(jié)構(gòu)難以維護(hù)。因此基于數(shù)據(jù)庫技術(shù)可以完美解決增量更新的問題。
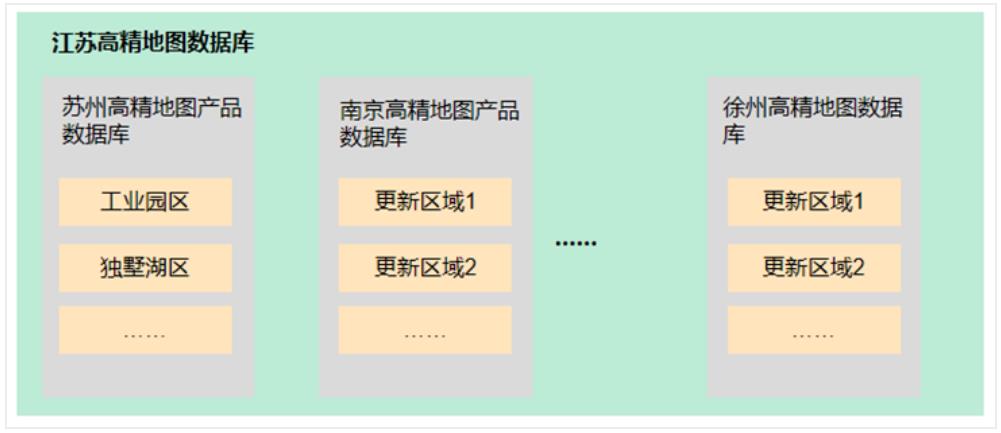
一份地圖數(shù)據(jù)可以稱為一個NDS數(shù)據(jù)庫(NDS Database),這個數(shù)據(jù)庫是按照NDS標(biāo)準(zhǔn)設(shè)計(jì)的,只要按照這個標(biāo)準(zhǔn)去制作的地圖數(shù)據(jù),都是可以兼容的。一個數(shù)據(jù)庫包含不同的產(chǎn)品數(shù)據(jù)庫(Product Database),這些產(chǎn)品數(shù)據(jù)庫可以是不同圖商制作的地圖,并且可以進(jìn)行獨(dú)立的版本控制和版本更新。而每一個產(chǎn)品數(shù)據(jù)庫還可以被進(jìn)一步劃分成多個更新區(qū)域(Update Region)。
如果江蘇高精地圖是一個數(shù)據(jù)庫,那么蘇州市就是是一個產(chǎn)品數(shù)據(jù)庫,工業(yè)園區(qū)、獨(dú)墅湖區(qū)、相城區(qū)等就是一個更新區(qū)域。
NDS.Live是NDS協(xié)會推出的新一代地圖數(shù)據(jù)標(biāo)準(zhǔn),NDS.Live在2019年開發(fā)之初就將關(guān)注點(diǎn)放在高度自動駕駛、功能安全性和地圖數(shù)據(jù)無縫分發(fā)上。它在NDS的基礎(chǔ)上,優(yōu)化了地圖數(shù)據(jù)的劃分結(jié)構(gòu),以Modules(單元模塊),Service Registries (可配置服務(wù))和Smart Layers(智能圖層)的形式進(jìn)行組合。這種高度模塊化的體系可以實(shí)現(xiàn)地圖數(shù)據(jù)在汽車、邊緣網(wǎng)絡(luò)(5G),以及云之間進(jìn)行跨場景使用及擴(kuò)展,以便數(shù)據(jù)高效快速地共享、更新和合成,保證了快速的數(shù)據(jù)流,同時減少了數(shù)據(jù)對網(wǎng)絡(luò)的壓力。與此同時,NDS.Live將關(guān)注點(diǎn)放在服務(wù)接口(service interface)的標(biāo)準(zhǔn)上,不限制數(shù)據(jù)儲存形式和地點(diǎn),數(shù)據(jù)可以來自不同的供應(yīng)商。NDS.Live擴(kuò)大了NDS地圖數(shù)據(jù)格式的范圍,以更好地支持在線e-horizon服務(wù)和動態(tài)地圖管理,從而為NDS開發(fā)人員和汽車廠商提供一個真正的分布式地圖體驗(yàn)。因此,自NDS.Live首次提出以來便受到了汽車行業(yè)的廣泛關(guān)注。
另外,NDS.Live不再由一個個數(shù)據(jù)庫組成,而是作為地圖分發(fā)系統(tǒng)而存在,可以運(yùn)行于車機(jī)端、移動設(shè)備端、云端、甚至ECU實(shí)時數(shù)據(jù)端。NDS.Live的發(fā)布和部署可以更好的滿足車載導(dǎo)航從離線到在線的轉(zhuǎn)變,使得更豐富、有效的動態(tài)信息可以實(shí)時地從云端發(fā)布至車機(jī),有效地解決了地圖數(shù)據(jù)量增長的問題,同樣也為ADAS,嵌入式導(dǎo)航和自動駕駛等應(yīng)用場景的多種需要的應(yīng)用提供了強(qiáng)有力的支持。
7、高精地圖制作流程
目前各家圖商高精地圖的制作流程基本類似,主要包含采集、處理、驗(yàn)證及發(fā)布四個過程。
一、采集
采集是通過裝有專業(yè)設(shè)備的專業(yè)采集車(專業(yè)采集)及普通設(shè)備的私家車(眾包采集)在道路上一厘米一厘米的采集完成。目前對于采集設(shè)備,主要有兩種流派,一種是以激光雷達(dá)點(diǎn)云為主的土豪派,一種是以相機(jī)視覺為主的技術(shù)派。
土豪派重金雇傭的激光雷達(dá)以測距精度高而聞名,正好也契合高精度地圖的高精度要求,再輔以組合導(dǎo)航、相機(jī)等幾名3D球員,完成時間同步、運(yùn)動補(bǔ)償?shù)膱F(tuán)隊(duì)磨合訓(xùn)練后,就可以派到戰(zhàn)場上廝殺了。土豪派雖然也用到相機(jī),但主要用來在處理過程彌補(bǔ)激光雷達(dá)點(diǎn)云稀疏的缺點(diǎn),非采集的主力傳感器。此方法主要成本較高,非大富大貴不可駕馭。
技術(shù)派采雇傭的相機(jī)以信息豐富,物美價廉而聞名,但是本身不輸出深度信息,需要輔以各種2D轉(zhuǎn)3D的算法來實(shí)現(xiàn)20cm內(nèi)的高精度要求,對后期處理能力要求很高。此方法適合智商高、家境一般的同學(xué)。
二、處理
對于土豪派來說,得到的是激光雷達(dá)輸出的點(diǎn)云數(shù)據(jù)。首先需要將每幀點(diǎn)云數(shù)據(jù)拼接起來,從而建立整個場景的點(diǎn)云地圖,整個過程也稱為點(diǎn)云注冊。目前實(shí)現(xiàn)點(diǎn)云注冊的主要有Autoware提供的NDT mapping及各種離線SLAM方案。下一步就是在拼接好的點(diǎn)云地圖基礎(chǔ)上,標(biāo)注出車道線信息、交通標(biāo)志信息、紅綠燈信息等,得出道路的結(jié)構(gòu)化信息。這一過程可輔以相機(jī)的圖像數(shù)據(jù),提高標(biāo)注準(zhǔn)確率。
對于技術(shù)派來說,是時候展示祖?zhèn)魇炙嚨臅r候了。什么AI深度學(xué)習(xí)、圖像識別、三維視覺等技術(shù),直接往采集數(shù)據(jù)上招呼。提取、歸類感興趣數(shù)據(jù),完成2D轉(zhuǎn)3D的模型,從而最終完成線識別、特征點(diǎn)提取、構(gòu)建車道的網(wǎng)絡(luò)拓?fù)湟约爸谱鞲鞣N地物(人行橫道、標(biāo)線、交通標(biāo)志)等。
處理是目前高精地圖制作中最費(fèi)時間精力的,面對的海量點(diǎn)云、圖像數(shù)據(jù),如果僅靠人工,帶動的標(biāo)注崗位將是喜人的。目前各家均在提高自動化標(biāo)注的能力、準(zhǔn)確率。
三、保存驗(yàn)證
將處理完的高精地圖數(shù)據(jù)按照客戶要求的數(shù)據(jù)規(guī)范保存為固定的格式,并交由專業(yè)的技術(shù)團(tuán)隊(duì)進(jìn)行質(zhì)量檢查。
四、發(fā)布
驗(yàn)證無誤的地圖,還不能對外發(fā)布,需要按照規(guī)定程序送至國家測繪局審核并取得審圖號后,方可進(jìn)行公開出版、展示、登載和銷售。
8、小結(jié)
借著項(xiàng)目鍛煉的機(jī)會,把高精地圖的基礎(chǔ)知識捋了一篇。越發(fā)覺得高精地圖作為一種超視距的“傳感器”,必將隨著自動駕駛落地的深入,實(shí)現(xiàn)“財(cái)富自由”。同時也看到,在高精地圖標(biāo)準(zhǔn)方面,世界各國都在發(fā)力標(biāo)準(zhǔn)的制定,而中國一但接受了國外標(biāo)準(zhǔn),不僅面臨經(jīng)濟(jì)上的額外支出,整個智能網(wǎng)聯(lián)可能也會長期受制于人。基于具有中國特色的交通條件,中國高精地圖上下游企業(yè)完全有優(yōu)勢,有能力盡早完成高精地圖中國標(biāo)準(zhǔn)的制定。
來源:十一號組織 作者11號線人






