
導讀:Flash激光雷達即將落地,感知方案有望進一步完善。
5月13日,亮道智能面向中國市場發(fā)布自研的純固態(tài)Flash激光雷達——LDSense Satellite。根據(jù)企業(yè)介紹,這是一款用于側向補盲的激光雷達,計劃在2023年下半年量產。
在此之前,2021年11月,Ouster也發(fā)布了DF(Digital Flash)系列固態(tài)激光雷達,并計劃在2025年量產上車。
此外,北科天繪、鐳神智能、北醒光子等激光雷達廠商,也在布局Flash激光雷達,預計未來幾年會有越來越多的產品落地。
一、Flash激光雷達的優(yōu)勢
如果按照掃描方式來劃分,激光雷達的技術演進路線可以分為:機械式到半固態(tài)再到純固態(tài)三個階段。
半固態(tài)激光雷達又可以分為三個技術路徑:MEMS、棱鏡和轉鏡,純固態(tài)則主要分為Flash、OPA等路線。
目前,量產上車的激光雷達主要為半固態(tài)激光雷達,其中,又以MEMS路線為主流,這主要是因為MEMS路線能夠較好地實現(xiàn)性能與耐久性的平衡。
但是,即便MEMS路線已經大幅減少了機械運動部件,其內部仍然集成了“可動”的微型鏡面,這對于產品可靠性和耐久性的提升依舊存在挑戰(zhàn)。
因此,業(yè)內普遍認為,沒有任何運動部件的純固態(tài)激光雷達,才是未來的主流技術方向。
在純固態(tài)激光的兩個主流技術方向來看,OPA技術工藝要求苛刻,生產難度大,預計短期內難以實現(xiàn)規(guī)模量產;結構相對簡單、技術更成熟的Flash激光雷達會更早實現(xiàn)落地。
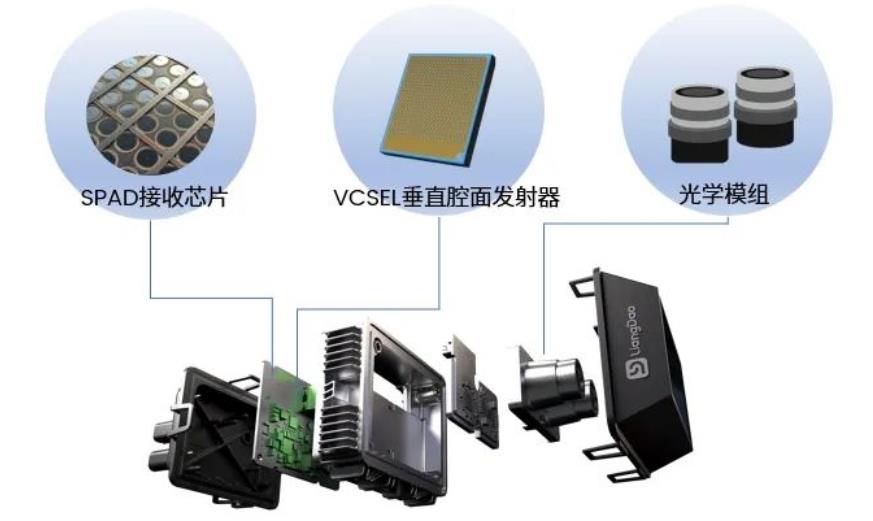
Flash激光雷達內部結構
但Flash技術路線也有短板,就是功率密度低,探測距離短,因此更適合于近距離的補盲。
從已經發(fā)布的激光雷達來看,多數(shù)產品考慮的性能在于探測距離,垂直視場角往往非常低,通常在30°以內,這在近距離探測時,往往會形成較大盲區(qū)。
Flash激光雷達則正可以彌補這一缺陷。例如,亮道智能發(fā)布的LDSense Satellite產品,垂直視場角可以達到75°-90°。這在一些特定的場景下,將發(fā)揮巨大價值。
除了有超大的垂直視場角以外,F(xiàn)lash激光雷達的優(yōu)勢還在于高可靠性、長使用壽命,以及更高的性價比。
相信隨著Flash激光雷達的量產落地,激光雷達傳感器配置方案會有完善的選擇。
二、優(yōu)化全場景輔助駕駛
全場景智能輔助駕駛,正是車企當前核心的研發(fā)投入之一。
今年5月初,華為率先宣布在極狐阿爾法S HI版上實現(xiàn)了這一能力,其他發(fā)布類似規(guī)劃的企業(yè)還包括小鵬汽車,以及長城汽車旗下的自動駕駛公司毫末智行等。
所謂全場景,就是包括高速、城市以及泊車三大用車場景。
目前,高階輔助駕駛能力落地的主要場景在高速和泊車場景。城市場景路況復雜、交通參與對象不確定性高,跟車、超車、規(guī)避障礙難度更大,多數(shù)企業(yè)還停留在測試階段。
通過實際體驗來看,不論是已經落地的高速場景、泊車場景,還在正在測試的城市場景,智能輔助駕駛的安全性、平順性都有待進一步提升。
智能輔助駕駛體驗是否順滑,這考驗的是車輛近距離識別的能力,也正是補盲激光雷達的用武之地。
例如,在高速或城區(qū)行駛時,因車輛加塞而導致的緊急避讓場景時常發(fā)生。結合側向激光雷達,可讓車輛前向感知水平視場角擴大至180°及以上,甚至達到車身全方位無死角覆蓋。
這樣,在對方車輛試圖跨越本車時即可判斷加塞意圖,從而獲得更充足的預警和響應時間,極大提高響應速度,有效減少事故發(fā)生,擴大未來L3及以上自動駕駛的應用范圍。
1個前向激光雷達實現(xiàn)車頭90°~120°的點云覆蓋
2個側向激光雷達實現(xiàn)車頭180°的點云覆蓋

1前向+2側向激光雷達,車身超270°感知覆蓋
此外,矮小障礙物精準感知也是補盲雷達的用武之地。在城區(qū)道路行駛,行人、兩輪車和穿梭變道的車輛混流,通行場景復雜多變,對于城區(qū)智能駕駛提出了更高挑戰(zhàn)。
安裝于車頂?shù)那跋蜷L距激光雷達,在探測時存在較大范圍的近場盲區(qū),無法應對一些特殊場景。
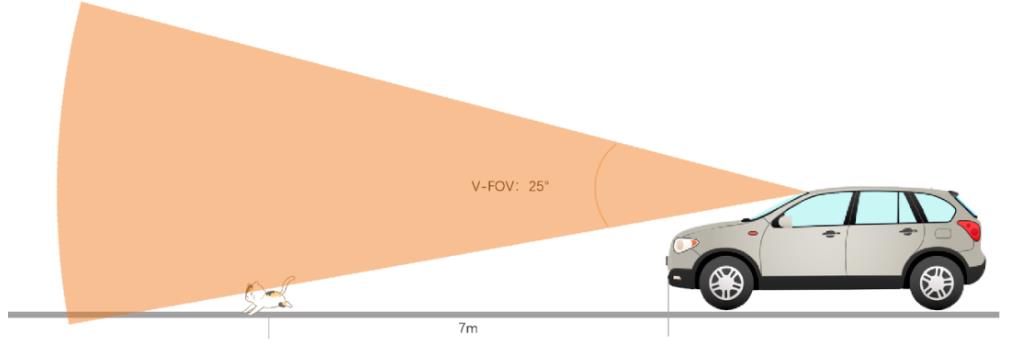
高度30cm的寵物貓,探測盲區(qū)超過7m
垂直視場角不低于75°的側向激光雷達可以與前向激光雷達的近場盲區(qū)進行點云互補,能夠實現(xiàn)低矮物體比如馬路邊沿、減速帶等目標物,以及相鄰車道線的探測。
以馬路邊沿為例,高度10cm,不僅可以實現(xiàn)0.35m-15m的近場探測,還能夠在0.35m處達到30行點云的超高分辨率的探測效果。
激光雷達近場探測盲區(qū)對比
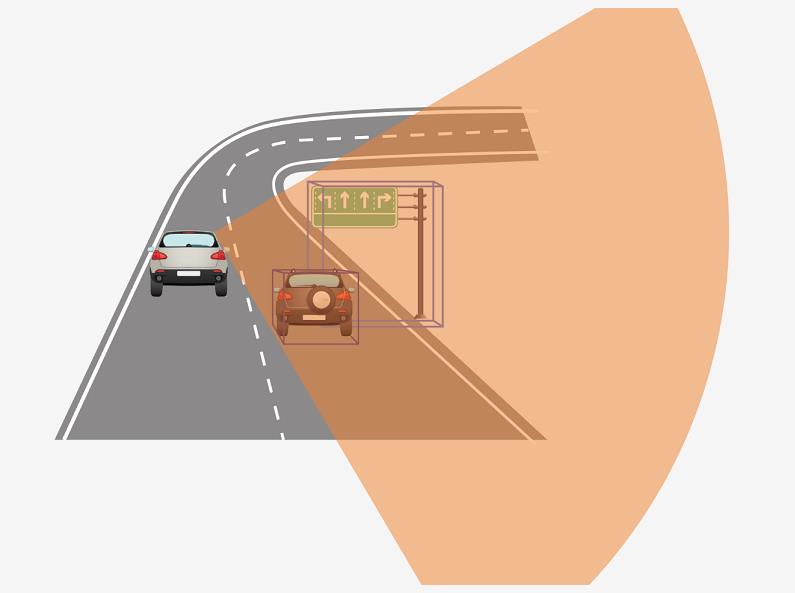
補盲激光雷達的第三個關鍵場景在于,與SLAM(即時定位與建圖)技術融合,實現(xiàn)車道級定位。當側向激光雷達安裝于頂部位置,在實現(xiàn)相鄰車道目標物的感知功能外,還可以通過感知道路周邊靜態(tài)標識物,獲得準確的相對位置信息,與SLAM技術結合,實現(xiàn)車道級精準定位。
三、完善激光雷達布置方案
據(jù)《賽博汽車》不完全統(tǒng)計,目前,已經公開宣布要搭載激光雷達的量產乘用車共計24款。從車企公布的激光雷達布局方案來看,往往搭載1-5顆不等。
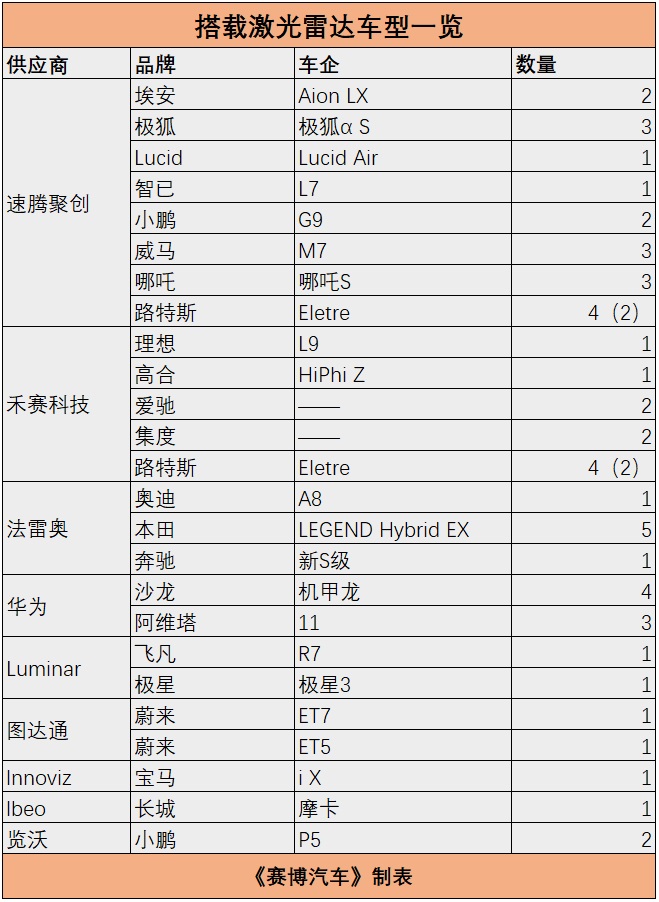
與此同時,車企對于激光雷達的布置方案也是五花八門,不盡相同。
通常來講,1顆激光雷達往往布置在車輛頂部,2顆激光雷達的布置就有了差異,例如小鵬P5布置在前臉兩側,集度則計劃布置在前機蓋上。
3顆激光雷達的布置方案就更多了,極狐阿爾法S將3顆都布置在前臉上,威馬M7則將一顆布置在車頂處,2顆布置在左右前翼子板處;阿維塔11則將一顆布置在前臉正中央,另外2顆布置在左右前翼子板處。
采用4顆激光雷達的路特斯Eletre,車頂前后各布置1顆,左右前翼子板處各布置一顆;機甲龍則是前臉3顆再加上后向一顆。
本田LegendHybrid EX的5顆激光雷達則采用了前2后3的布置。
可以看出,車企對于激光雷達布置方案的判斷存在較大差異,甚至在不久前,幾家車企CEO還因此產生過爭論。
但是大家想解決的問題都是一致的,都是為了兼顧探測距離以及探測角度,平衡最佳方案。
此次,亮道智能發(fā)布純固態(tài)Flash激光雷達正是打了一個差異化發(fā)展的路線,布局下一代激光雷達技術,填補側向激光雷達市場空缺,以圖打開市場。
相信隨著純固態(tài)Flash激光雷達的落地,將會有更完善的傳感器配置方案,為迎接高級別自動駕駛做好準備。
來源:賽博汽車 作者:肖瑩






