
導讀:自動駕駛領域已持續火熱了多年,而截止目前,自動駕駛在真實復雜場景下的大規模部署卻一再延后。其中一個很重要的原因是,對于動態和強交互性場景下的行為和軌跡預測問題(behavior prediction)始終沒有得出很好的解決方案。由于缺乏對其他道路參與者的行為理解與預測,自動駕駛車輛便無法進行安全高效的決策、規劃以及控制。
在自動駕駛領域,很早就有業內人士指出:行為預測是自動駕駛最具挑戰性的問題之一,比如曾經領導Google無人車項目多年的Chris Urmson,曾在演講中提到:Google無人車項目的最大障礙就在于怎樣理解并預測周圍道路參與者的未來行為。
一、什么是自動駕駛中的行為預測問題?
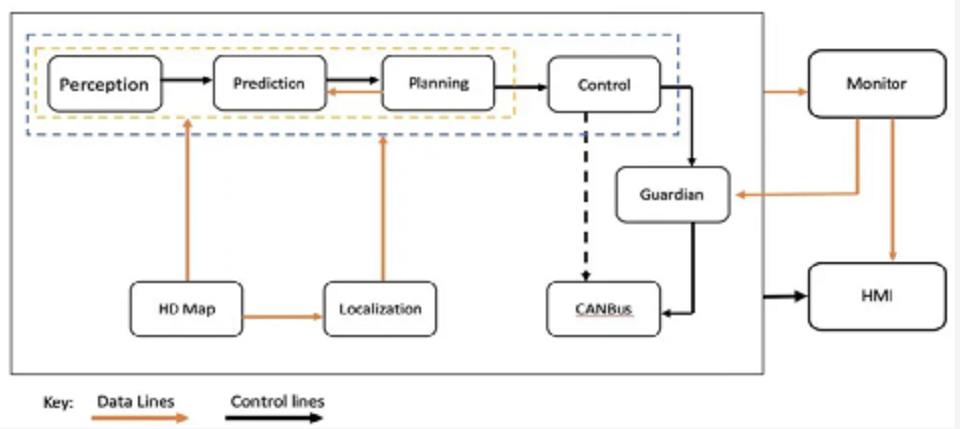
讓我們從自動駕駛汽車的工作原理開始。我們知道,目前自動駕駛的整體架構如下圖所示,預測處于的位置在感知與規劃之間,它拿到上游感知識別到的障礙物信息,并對這些障礙物在未來時間內的行為及軌跡做出一系列的預測,再將預測的軌跡給到規劃模塊,從而幫助規劃模塊能夠生成更加合理、安全、舒適的軌跡。
自動駕駛汽車需要能夠對未來做出預測 —— 這是司機們一直在潛意識里做的事情。設想一輛自動駕駛汽車試圖左轉,而另一輛車正從相反的方向駛來。為了使自動駕駛汽車安全地執行這一操作,它需要確定另一輛車是右轉還是繼續直行并干擾左轉,這正是運動預測的意義所在。而自動駕駛駕駛中的預測模塊,便是模仿司機在道路上針對不同障礙物的預測判斷,而不同的駕駛員針對相同的障礙物,他們的判斷是不一樣的,往往一個老司機比一個新手司機所多出來的知識經驗就體現在這方面,而這也恰恰決定了一個自動駕駛系統的智能性及安全性,是他是否能達到類人駕駛的一個重要標志。
二、行為預測到底重要在哪?
我們知道,評判一個司機是否是經驗老到的老司機,最重要的一點就是他對未知情況的預見性,如果能預測出一些危險的場景并能提前做出判斷,那便能使得駕駛更加得安全舒適,而自動駕駛中的行為預測技術在這里便是充當這一功能。可以說沒有行為預測,自動駕駛也許能解決大部分的簡單場景,但是要真正實現L5級別的自動駕駛,行為預測是其中的關鍵技術,也是決定各家廠商最后成敗的關鍵一環。
自動駕駛公司 Pronto CEO Anthony Levandowski 講述了自己的看法:他認為自動駕駛原型車在「預測」能力上的短板是阻礙其奔向 Level 4/5 的絆腳石。在 Medium 上發布的一篇博文中,Levandowski 寫道:「現在沒人能實現 Level 4/5 是因為如今的軟件還不太行,它無法預測未來。在這方面,軟件跟人類直覺差遠了,而行為預測又恰恰是道路安全最重要的因素。」

目前市場上的自動駕駛系統中,預測環可能是每個業界玩家都深感頭疼,卻又不得不解決的一個難題。在一次商業采訪中,Levandowski 又重申了預測重要性這一觀點:
「如果你想分析測試車每次『脫離』背后的故事,找到真正的原因,最終結果都是軟件故障。即使是較為成熟的公司也難以避免,因為在復雜環境下,車輛很容易出現誤解或溝通問題。眼下我們的問題不是能否找到更好的傳感器,而是如何解決預測這個大問題。」由此可見預測的重要性在所有自動駕駛公司中都已經得到極大的重視,并且也提上了日程。
三、行為預測的現有解決方案
根據行為預測問題的定義,業界將自動駕駛軌跡預測的方法分為3類。
1.Physics-based motion models 物理模型
2.Maneuver-based motion models 意圖模型
3.Interaction-aware motion models 交互模型
物理模型即利用汽車運動學模型及動力學模型,把汽車當做一個剛體,根據剛體運動預測汽車的軌跡。缺點是對時間的定性約束,車輛非常多的情況,不能應用到其它拓撲結構的道路。
意圖模型將車的軌跡可以分為一系列的簇,每一簇對應一個典型的運動模式。缺點是對時間的定性約束,車輛非常多的情況,不能應用到其它拓撲結構的道路。
交互模型比物理模型預測的時間更久,比基于意圖的預測更加穩定,但同時計算多個汽車之間的關系計算量比較大,非常耗時。
四、行為預測的未來挑戰
作為自動駕駛的重要細分方向之一,“自動駕駛中的行為預測問題“吸引了大量研究人員的關注與努力。近年來,伴隨著深度學習在自動駕駛領域的應用不斷加深,行為預測的精度更是得到了大幅度的提升。然而,現實世界中的駕駛場景極其地復雜多樣,不同的駕駛場景(高速,交叉路口,環島等),無論是道路結構,還是駕駛模式都存在不小的差異。
從駕駛場景來看,當前的行為預測方法通過訓練后可以在訓練集所包含的場景上表現良好,但是一旦遇到一個全新的或者稍有差異的場景,模型的預測性能往往會崩潰或大幅下降。通過上述行為預測方法訓練出的模型,由于遷移性(transferability)和泛化能力(generalizability)的缺失,會極大地限制自動駕駛進行大規模部署。倘若需要針對每一個駕駛場景專門訓練一個模型,可想而知開發成本會多么高昂。

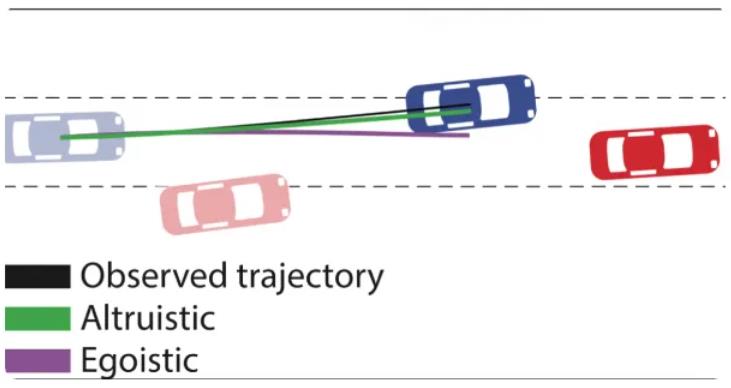
除此以外,對真實駕駛環境中復雜多樣的駕駛行為實現高效精準預測,也是一項不小的挑戰。駕駛行為因人而異(heterogeneous) ,不同的駕駛員展現出的駕駛行為存在著較大差異,不同的駕駛員也有著不同的駕駛風格,有粗魯莽撞的駕駛員,也有謹慎禮貌的駕駛員。
而目前的大部分預測方法,通過訓練后僅僅能夠預測出平均意義上的駕駛行為,卻無法捕捉到駕駛員的個體差異。智能體對個體行為差異理解的缺失,將會始終制約行為預測的精度,因而自動駕駛行為的安全性也將難以得到保障。
在不久的將來,預測將會成為自動駕駛落地的關鍵技術之一,而預測算法的強大與否,也將直接決定了現在所有自動駕駛玩家的上限,以及用戶在體驗各家產品對于乘坐安全性及舒適性的高要求。
參考資料:
[1]知乎OpenDILa:
https://zhuanlan.zhihu.com/p/513363447?utm_source=wechat_session&utm_medium=social&utm_oi=963565229426352128&utm_campaign=shareopn
來源:智車科技






