
導(dǎo)讀:當前,汽車工業(yè)迎來百年未有之智能科技浪潮,自動代客泊車(Automated Valet Parking,AVP)系統(tǒng)作為智能駕駛的重要場景,可以實現(xiàn)第一公里和最后一公里的全自動駕駛,例如用戶在電梯口下車,車輛自動駕駛泊入車位;用戶通過手機召喚車輛,車輛自動駕駛到用戶指定位置。AVP是L4級自動駕駛系統(tǒng)技術(shù)之一。本文從自動代客泊車市場需求、政策環(huán)境、技術(shù)環(huán)境、技術(shù)演進過程、系統(tǒng)方案5個維度展開分析,對代客泊車技術(shù)發(fā)展趨勢做出預(yù)測,對未來代客泊車產(chǎn)業(yè)發(fā)展提出建議。

一、AVP市場需求分析
AVP的市場需求主要來源于3個方面:
(1)個人用戶;
(2)移動出行運營商等企業(yè)用戶;
(3)負責城市建設(shè)的政府部門。
1.1 個人用戶需求
個人用戶常常遇到以下場景:車位不足,耗費大量時間尋找車位;取車時,忘記車停在哪里;停車場死角多,易發(fā)生交通事故;停車場陰冷昏暗,讓人感到害怕。這些場景是用戶的典型痛點。假設(shè)每個駕駛員每天出行2次,最常見的就是上班1次,下班1次,需要取2次車,停2次車,每次取車或停車時間平均為7~8 min,那么每天每個駕駛員浪費在取車和停車上的時間就達到了30 min,全年是1.1萬min,相當于15天。通過應(yīng)用AVP,可以為每個駕駛員每年節(jié)省大約15天的自由時間。
1.2 企業(yè)用戶需求
對于企業(yè)用戶而言,移動出行運營商(租車或者分時租賃)將是最大客戶。移動出行運營商有大量的車和大量的用戶訂單,需要投入大量人力進行汽車的調(diào)度、充電、洗車工作,通過應(yīng)用代客泊車系統(tǒng),可以有效解決運營商調(diào)度成本高的問題。據(jù)百度測算,可以降低運營商30%的運營成本,這是相當可觀的降本途徑。
1.3 政府部門需求
2020年,我國汽車保有量超過2.8億輛,城市汽車與停車位比例約為1:0.5,遠低于全球平均水平,停車位缺口高達6 000萬個,與此同時,又有44%的車位利用率非常低,加劇了停車難的問題;2021年上半年,新能源汽車保有量603萬輛,充電樁僅187萬個,車樁比3.2:1,充電樁嚴重不足。車與車位資源、車與充電樁資源的不匹配問題,對智慧城市建設(shè)提出了更高的要求。通過應(yīng)用AVP系統(tǒng),可以實現(xiàn)高效密集泊車、智能有序充電,從而解決車位不足、充電樁不足、資源不匹配的城市建設(shè)難題。
電動汽車百人會在2020年的問卷調(diào)查結(jié)果顯示超過80%的用戶對自動代客泊車持期待態(tài)度,這充分說明了社會對于AVP的迫切需求。
通過上述3個方面的需求分析,可以得出AVP具有需求廣泛、使用頻次高、市場潛力大的特點。同時,使用AVP自身車速較低、造成的安全風(fēng)險較小,以及可以在限定區(qū)域下率先應(yīng)用,這些特性催生了自主代客泊車必將是最先大規(guī)模商業(yè)化落地的L4級自動駕駛系統(tǒng)之一。AVP不但能解決用戶痛點,而且能產(chǎn)生全新商業(yè)場景,帶動相關(guān)產(chǎn)業(yè)協(xié)同發(fā)展。
二、AVP政策環(huán)境分析
通過梳理過去一年多的政策,可以發(fā)現(xiàn)政府正在密集出臺系列政策,大力推進AVP系統(tǒng)技術(shù)和產(chǎn)品發(fā)展應(yīng)用。
2020年2月,發(fā)改委等11部委印發(fā)《智能汽車創(chuàng)新發(fā)展戰(zhàn)略》,目標到2025年,實現(xiàn)高度自動駕駛的智能汽車在特定環(huán)境下市場化應(yīng)用。2020年11月,國務(wù)院辦公廳印發(fā)《新能源汽車產(chǎn)業(yè)發(fā)展規(guī)劃(2021-2035年)》中明確提出,將引導(dǎo)推進自動代客泊車技術(shù)發(fā)展及應(yīng)用。這2項政策文件為發(fā)展AVP設(shè)定了明確目標。
2021年3月,公安部印發(fā)《道路交通安全法(修訂建議稿)》新增第155條規(guī)定,明確了自動駕駛車輛進行道路測試和通行的有關(guān)要求。2021年4月,工信部印發(fā)《智能網(wǎng)聯(lián)汽車生產(chǎn)企業(yè)及產(chǎn)品準入管理指南》(征求意見稿),為AVP生產(chǎn)企業(yè)和產(chǎn)品準入提供了依據(jù)。這2項政策為AVP落地提供了基礎(chǔ)保障。
2021年5月,發(fā)改委《關(guān)于進一步提升充換電基礎(chǔ)設(shè)施服務(wù)保障能力的實施意見(征求意見)》中提出,加強車網(wǎng)互動新技術(shù)研發(fā)應(yīng)用,鼓勵推廣智能有序充電。這里的車網(wǎng)互動、智能有序充電,需要自動代客泊車技術(shù)的支持,這為AVP的落地提供了一個典型應(yīng)用場景。
三、技術(shù)環(huán)境分析
目前我國建成全球最大的5G獨立組網(wǎng)網(wǎng)絡(luò),先進車輛域控算力超過1 000 TOPS,固態(tài)激光雷達、4D毫米波雷達、高分辨率攝像頭、深度學(xué)習(xí)、OTA、影子模式、大數(shù)據(jù)仿真一系列相關(guān)技術(shù)進步,為AVP自動駕駛過程中高精度定位、高準確度環(huán)境感知、低延時車場協(xié)同控制、算法迭代提供了基礎(chǔ),正在驅(qū)動AVP功能加速成熟。
四、AVP技術(shù)演進過程
近年來,自動泊車技術(shù)和產(chǎn)品發(fā)展迅速,其演進過程如圖1所示。在2016年之前均是基于超聲波雷達的半自動泊車,系統(tǒng)僅控制方向盤,半自動泊車處于市場成熟期;2018年,基于超聲波和環(huán)視的全自動融合泊車(APA)及遙控泊車(RPA)走向市場,系統(tǒng)控制車輛的橫向運動和縱向運動,駕駛員可以在車外通過鑰匙或手機操控車輛,這些產(chǎn)品解決了最后10 m的自動駕駛問題,處于市場成長期。今年,市場上出現(xiàn)了輔助代客泊車類產(chǎn)品,雖然車輛能夠自動駕駛100 m的距離,但仍需駕駛員監(jiān)控車輛周圍環(huán)境,并沒有徹底解放用戶,因此自動駕駛等級可以歸類到L2.5~L3之間,處于市場導(dǎo)入期。這類產(chǎn)品可以說是向全自主代客泊車發(fā)展的過渡產(chǎn)品,市場真正期待的是L4級別的自動代客泊車系統(tǒng),從而將駕駛員從取車、停車中徹底解放出來。
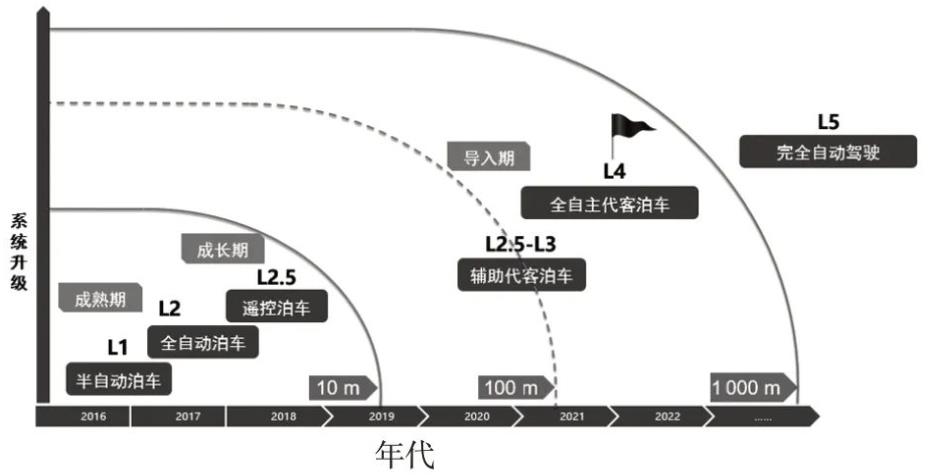
圖1 AVP技術(shù)演進過程
五、AVP系統(tǒng)方案分析
按照T/CSAE—2020《自主代客泊車系統(tǒng)總體技術(shù)要求》,AVP系統(tǒng)技術(shù)路線可以分為3類:
(1)基于車端智能技術(shù)路線;
(2)基于場端智能技術(shù)路線;
(3)車場融合技術(shù)路線。
這3者主要區(qū)別是系統(tǒng)的環(huán)境感知、規(guī)劃決策和高精定位實現(xiàn)的位置不同,具體對比見表1。
表1 3種AVP技術(shù)方案對比
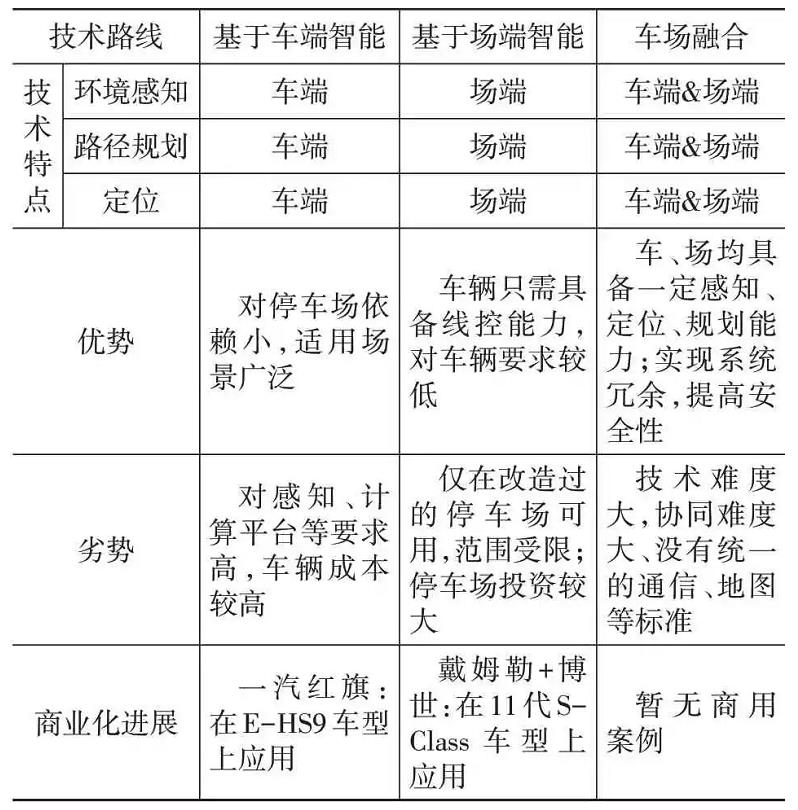
基于車端智能技術(shù)路線的優(yōu)勢在于對停車場依賴小,不改造或者簡單改造停車場的標志、標線、光線和網(wǎng)絡(luò)環(huán)境,適用場景廣泛,更容易推廣應(yīng)用;劣勢在于對感知、計算平臺要求高,車輛成本高。一汽紅旗目前采用該技術(shù)方案,在今年6月份釋放了首版全功能代客泊車系統(tǒng)軟件。
基于場端智能技術(shù)路線優(yōu)勢在于車輛只需具備線控能力,對車輛要求較低;劣勢在于僅在改造過的停車場可用,范圍受限;停車場投資較大,投資回報周期長;戴姆勒和博世集團公司是該技術(shù)路線的實踐者,目前在S-Class車型上量產(chǎn)應(yīng)用。
基于車場融合技術(shù)路線可以降低場端投資,車端和場端都具備一定的感知、定位和規(guī)劃能力,可實現(xiàn)系統(tǒng)冗余,提高安全性;劣勢在于技術(shù)難度大,產(chǎn)業(yè)涉及利益相關(guān)方多,協(xié)同難度大,沒有統(tǒng)一的通信和地圖標準,該方案目前暫無商用案例。
AVP系統(tǒng)的總體方案如圖2所示,主要由車端、場端、云端和手機端4部分構(gòu)成。圖2去掉右側(cè)的場端部分,就是基于車端智能的技術(shù)方案,在車輛上搭載環(huán)視、前視、后視、Radar、LiDAR、USS傳感器及高算力計算平臺;圖2去掉車端的環(huán)境感知和規(guī)劃決策模塊,就是基于場端智能的技術(shù)方案,在場端布置攝像頭、激光雷達、UWB、邊緣服務(wù)器設(shè)備,實現(xiàn)障礙物探測、高精度定位和規(guī)劃決策的智能化功能。車端、場端、云端及手機端4部分聯(lián)合,就構(gòu)成了完整的車場協(xié)同控制的代客泊車系統(tǒng),車場協(xié)同控制因融合和車端和場端功能的優(yōu)勢,可以聯(lián)合自動地鎖、自動充電、無線充電、自動洗車的基礎(chǔ)服務(wù),實現(xiàn)更加智能、安全、豐富的閉環(huán)生態(tài)場景,因此,車場協(xié)同控制是未來自動代客泊車技術(shù)的發(fā)展方向。
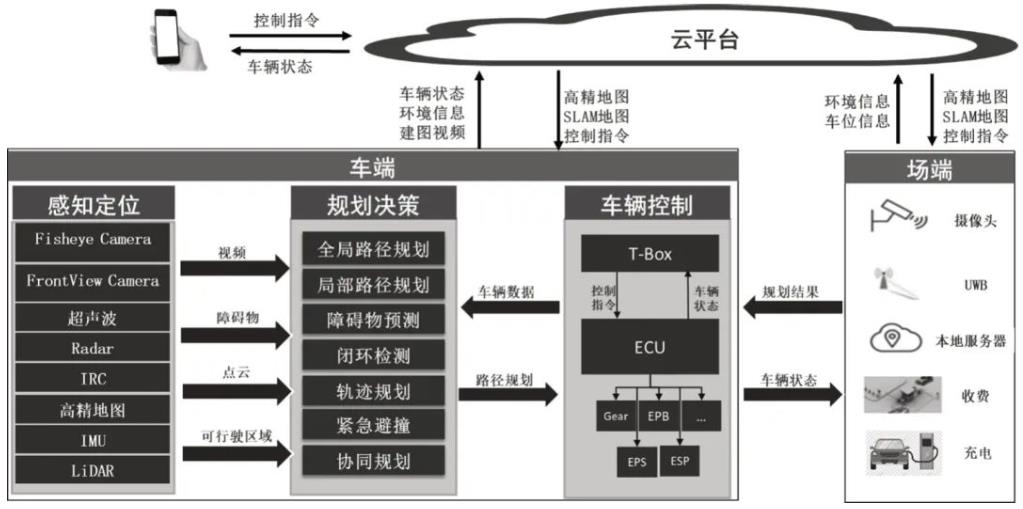
圖2 AVP系統(tǒng)總體方案
六、AVP生態(tài)場景構(gòu)想
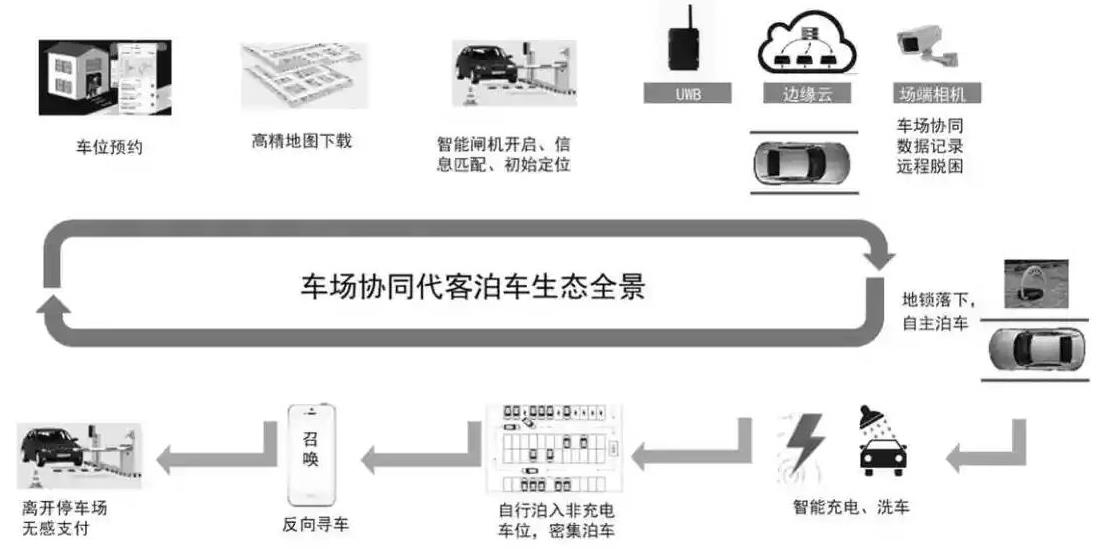
圖3 車場協(xié)同控制的代客泊車生態(tài)全景
用戶通過手機預(yù)約停車場車位,車輛行駛到停車場附近自動下載停車場高精度地圖,進入停車場時,智能閘機開啟,并完成與預(yù)約信息的匹配及初始定位;用戶在電梯口下車,車輛開始自動駕駛,場端規(guī)劃全局路徑并實時監(jiān)控道路情況,避開擁堵路段,同時場端提供輔助定位及輔助感知結(jié)果,與車端定位感知結(jié)果相融合,確保安全;車輛到達目標車位附近,智能地鎖自動落下,車輛泊入預(yù)約車位;泊車入位成功后,通過無線充電或者自動充電手臂方式,接入智能充電樁開始充電,充滿電后,AVP車輛自動泊入非充電車位,從而空出充電樁供其它用戶使用;用戶需要用車時,通過手機啟動自動接駕,車輛自動駕駛到用戶所在位置,即反向?qū)ぼ嚒H缓笥脩赳{駛車輛,閘機自動抬起,完成停車費用及充電費用無感支付。
車場協(xié)同控制的代客泊車系統(tǒng)打通了停車場基礎(chǔ)服務(wù)、智能服務(wù)和充電服務(wù),實現(xiàn)自動泊車的場景閉環(huán),應(yīng)用前景極為廣闊。
七、AVP產(chǎn)業(yè)發(fā)展建議
(1)繼續(xù)完善法律法規(guī)
2021年發(fā)布了《智能網(wǎng)聯(lián)汽車生產(chǎn)企業(yè)及產(chǎn)品準入管理指南》(征求意見稿)和《道路交通安全法(修訂建議稿)》,在法律法規(guī)層面取得了巨大的進步,但在保險、責任認定方面仍需進一步完善。
(2)探索商業(yè)模式,建立AVP生態(tài)圈
AVP涉及政府、停車場、主機廠、AVP方案商、圖商、移動出行運營商和用戶多個利益相關(guān)方,AVP產(chǎn)品和服務(wù)如何收費、在哪個環(huán)節(jié)收費、收益如何分配需探索出可行的商業(yè)模式,進而推動產(chǎn)業(yè)化落地。
(3)開展AVP商業(yè)試點,推進AVP標準制定
建議對有條件的車企和停車場發(fā)放AVP試點許可,增加消費者對AVP的認知程度;積累大量測試數(shù)據(jù)和運行經(jīng)驗,逐步完善停車場建設(shè)、車場通訊和高精度地圖相關(guān)的AVP標準。
(4)車端“滲透率”與場端“覆蓋率”相互拉動,場端建設(shè)和改造一定程度上要先行先試
以我國ETC產(chǎn)業(yè)發(fā)展為參考,1996年在首都機場第一條ETC車道建成,2015年實現(xiàn)全國主線收費站100%覆蓋,而全國2015年的ETC用戶數(shù)僅占到當年汽車保有量的13%,之后經(jīng)過5年的推廣,在2020年,我國ETC用戶數(shù)量超過2億,占到汽車保有量的70%以上。因此,可以參考ETC的發(fā)展路徑,率先建設(shè)改造規(guī)范化、智能化的停車場,當規(guī)范化停車場達到一定數(shù)量,AVP車輛將會迎來爆發(fā)式增加。
八、結(jié)束語
(1)AVP系統(tǒng)具有用戶剛需、使用頻次高、安全風(fēng)險較小、限定區(qū)域下行駛的特點,這些特點催生了AVP必將是最先大規(guī)模商業(yè)化落地的L4級自動駕駛系統(tǒng)之一。
(2)從產(chǎn)業(yè)政策環(huán)境和技術(shù)環(huán)境方面來分析,AVP落地的條件已日趨成熟。
(3)代客泊車輔助系統(tǒng)是向L4級AVP發(fā)展的階段性過渡產(chǎn)品,該類產(chǎn)品雖然不屬于真正的L4級AVP系統(tǒng),但為L4級AVP的落地打下一定的基礎(chǔ)。
(4)車場協(xié)同控制的代客泊車系統(tǒng)一方面因其實現(xiàn)感知、定位的車場融合,系統(tǒng)智能化程度更高,另一方面打通了用戶停車過程相關(guān)的各個環(huán)節(jié),實現(xiàn)生態(tài)場景的閉環(huán),因此是下一代泊車技術(shù)發(fā)展方向。
(5)要促進AVP功能的真正大規(guī)模落地,還需繼續(xù)在法規(guī)、標準、生態(tài)和示范運營多方面開展工作。
來源:智能汽車設(shè)計 ,作者王恒凱






