
導(dǎo)讀:隨著自動(dòng)駕駛技術(shù)的逐漸成熟,越來(lái)越多的應(yīng)屆生甚至工作幾年的職場(chǎng)人士都想進(jìn)入這一領(lǐng)域,不僅僅有著高薪酬吸引的原因,一旦未來(lái)市場(chǎng)環(huán)境成熟自動(dòng)駕駛的商業(yè)價(jià)值及帶來(lái)的社會(huì)變革都將引領(lǐng)時(shí)代潮流。但由于自動(dòng)駕駛的興起時(shí)間并不長(zhǎng),技術(shù)并沒(méi)有得到長(zhǎng)時(shí)間的積累,目前很少有大學(xué)能夠開(kāi)設(shè)自動(dòng)駕駛的相關(guān)專(zhuān)業(yè),從另一方面來(lái)說(shuō),由于自動(dòng)駕駛領(lǐng)域牽涉到的技術(shù)過(guò)于廣泛,事實(shí)上很難設(shè)定一個(gè)專(zhuān)業(yè)來(lái)掌握該領(lǐng)域的所有知識(shí),這也是該專(zhuān)業(yè)無(wú)法在目前大學(xué)中普及的原因之一。
那么如果現(xiàn)在想要入局自動(dòng)駕駛,在學(xué)校中學(xué)習(xí)哪個(gè)專(zhuān)業(yè)更好,如何找到自己所感興趣的方向呢?本篇文章對(duì)自動(dòng)駕駛行業(yè)所需要的專(zhuān)業(yè)進(jìn)行分析,也對(duì)目前自動(dòng)駕駛公司中需求較多的崗位進(jìn)行介紹,希望能幫助想進(jìn)入自動(dòng)駕駛行業(yè)的讀者提供一些思路。
一、感知系統(tǒng)
目前自動(dòng)駕駛中最受到外界關(guān)注與討論,學(xué)術(shù)界最火熱的領(lǐng)域便是自動(dòng)駕駛的“眼睛”——感知系統(tǒng)了。對(duì)于自動(dòng)駕駛的感知來(lái)說(shuō),其涉及到的技術(shù)為目前最前沿的圖像識(shí)別、深度學(xué)習(xí)、圖形檢測(cè)分類(lèi)等等,因此極大多數(shù)從事其他感知行業(yè)的從業(yè)者,都會(huì)通過(guò)此條路徑來(lái)轉(zhuǎn)行到自動(dòng)駕駛領(lǐng)域來(lái)。這一方面也就造成了相關(guān)模塊的競(jìng)爭(zhēng)較為激烈,而同時(shí)該領(lǐng)域的未來(lái)前景也是被相當(dāng)看好的。
從事感知模塊的工作,首先要掌握感知模塊通過(guò)深度學(xué)習(xí)和傳統(tǒng)算法的融合處理激光雷達(dá)、攝像頭、毫米波雷達(dá)、超聲波雷達(dá)等傳感器傳過(guò)來(lái)的數(shù)據(jù),獲得動(dòng)態(tài)障礙物信息(速度、大小、位置、類(lèi)型等)、交通標(biāo)志信息(紅綠燈、路標(biāo)、限速信息等)、靜態(tài)障礙物(路障、圍欄、花壇等)、盲區(qū)信息、道路結(jié)構(gòu)信息等;通過(guò)感知模塊可以為自動(dòng)駕駛汽車(chē)提供周?chē)澜绲娜啃畔ⅰ?
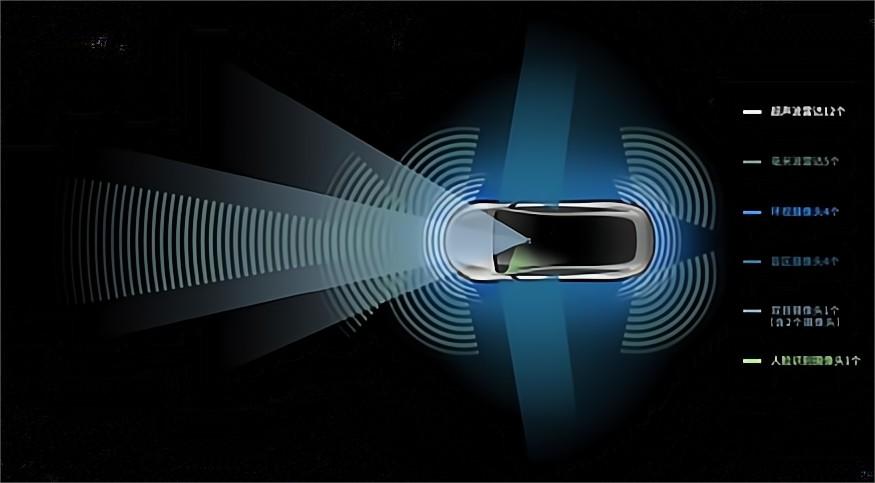
其次,想要從事感知模塊,不僅僅得具有相應(yīng)的算法能力,也得了解如何設(shè)計(jì)出保證自動(dòng)駕駛車(chē)的安全性和系統(tǒng)冗余的傳感器方案,如何能通過(guò)多傳感器的融合技術(shù)使得無(wú)人車(chē)具備超越人類(lèi)的障礙物檢測(cè)、分類(lèi)、跟蹤、理解場(chǎng)景、實(shí)時(shí)定位的能力,在不同路況、天氣和環(huán)境中都能準(zhǔn)確地“看”到周?chē)氖澜纾邆淙旌蚬ぷ鞯哪芰Α_@里的技術(shù)雖然不是感知算法從業(yè)者的主項(xiàng),但精通的了解將會(huì)有力幫助自身的算法設(shè)計(jì)及場(chǎng)景落地規(guī)劃。
無(wú)論是作為學(xué)生,亦或是工作幾年的職場(chǎng)人,想要通過(guò)感知算法領(lǐng)域進(jìn)入自動(dòng)駕駛行業(yè)目前來(lái)看正在變得越來(lái)越困難,越來(lái)越多各種專(zhuān)業(yè)的學(xué)生都或多或少在學(xué)校里做到的項(xiàng)目都涉及一些感知領(lǐng)域的基礎(chǔ),但同時(shí)目前感知系統(tǒng)也是自動(dòng)駕駛領(lǐng)域需求最大的方向之一,掌握好核心技術(shù)將會(huì)在未來(lái)?yè)碛凶陨淼暮诵母?jìng)爭(zhēng)力。
二、決策規(guī)劃控制系統(tǒng)
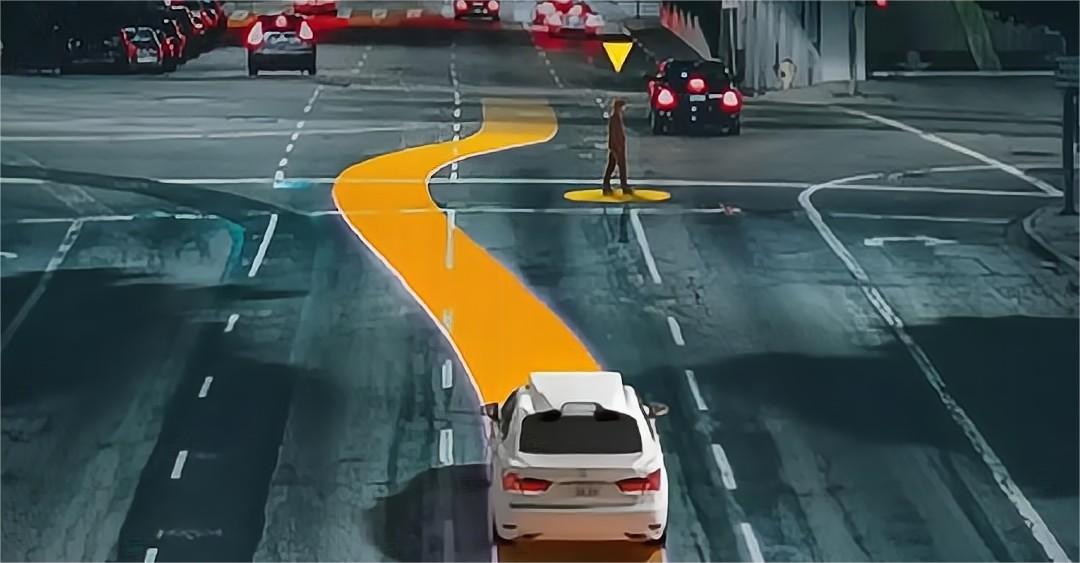
當(dāng)接收到感知系統(tǒng)給出的障礙物信息、道路結(jié)構(gòu)信息、定位信息,接下來(lái)一步便是對(duì)相關(guān)信息進(jìn)行處理,指導(dǎo)自動(dòng)駕駛車(chē)輛應(yīng)該如何運(yùn)動(dòng)。
首先,預(yù)測(cè)模塊對(duì)動(dòng)態(tài)障礙物進(jìn)行預(yù)測(cè),評(píng)估障礙物未來(lái)可能的動(dòng)作,然后決策系統(tǒng)針對(duì)動(dòng)靜態(tài)障礙物信息、道路結(jié)構(gòu)及自動(dòng)駕駛車(chē)輛的信息做出自動(dòng)駕駛車(chē)下一步該如何做,比如換道、停車(chē)、加速、減速、避讓等動(dòng)作,然后規(guī)劃系統(tǒng)規(guī)劃出具體的運(yùn)動(dòng)軌跡。在實(shí)際工作中,決策規(guī)劃往往被整合為一個(gè)模塊,通過(guò)相互的協(xié)作配合共同保證輸出駕駛行為及軌跡的穩(wěn)定性及安全性。在生成軌跡之后,控制模塊跟蹤規(guī)劃軌跡,對(duì)自動(dòng)駕駛車(chē)輛進(jìn)行控制,將相關(guān)指令輸給線(xiàn)控系統(tǒng),控制剎車(chē)、油門(mén)、方向盤(pán)執(zhí)行器。
如何能準(zhǔn)確的預(yù)測(cè)動(dòng)態(tài)障礙物的行為,如何解決環(huán)境不確定性、與障礙物之間的交互博弈,如何解決橫縱向規(guī)劃的穩(wěn)定性以及控制跟蹤的快速性和穩(wěn)定性是該模塊的重要工作。在這一領(lǐng)域中,絕大多數(shù)需要包括控制工程專(zhuān)業(yè)、車(chē)輛專(zhuān)業(yè)、機(jī)器人等專(zhuān)業(yè)在內(nèi)的相關(guān)人才。因?yàn)椴煌诟兄到y(tǒng)僅專(zhuān)注于軟件算法,規(guī)劃控制工程師還需要對(duì)車(chē)輛的動(dòng)力學(xué)及運(yùn)動(dòng)學(xué)能力有著清晰的認(rèn)識(shí),才能在設(shè)計(jì)算法時(shí)更好地去考慮車(chē)輛的能力,從而實(shí)現(xiàn)更加舒適魯棒的控制。
目前決策規(guī)劃領(lǐng)域在自動(dòng)駕駛中的地位逐漸提升,在解決了感知相關(guān)問(wèn)題之后,如何能夠讓自動(dòng)駕駛車(chē)輛實(shí)現(xiàn)真正的類(lèi)人駕駛,做出更加安全合適的決策將會(huì)是自動(dòng)駕駛領(lǐng)域的長(zhǎng)遠(yuǎn)工作,未來(lái)的發(fā)展前景也將不可限量。
三、硬件系統(tǒng)
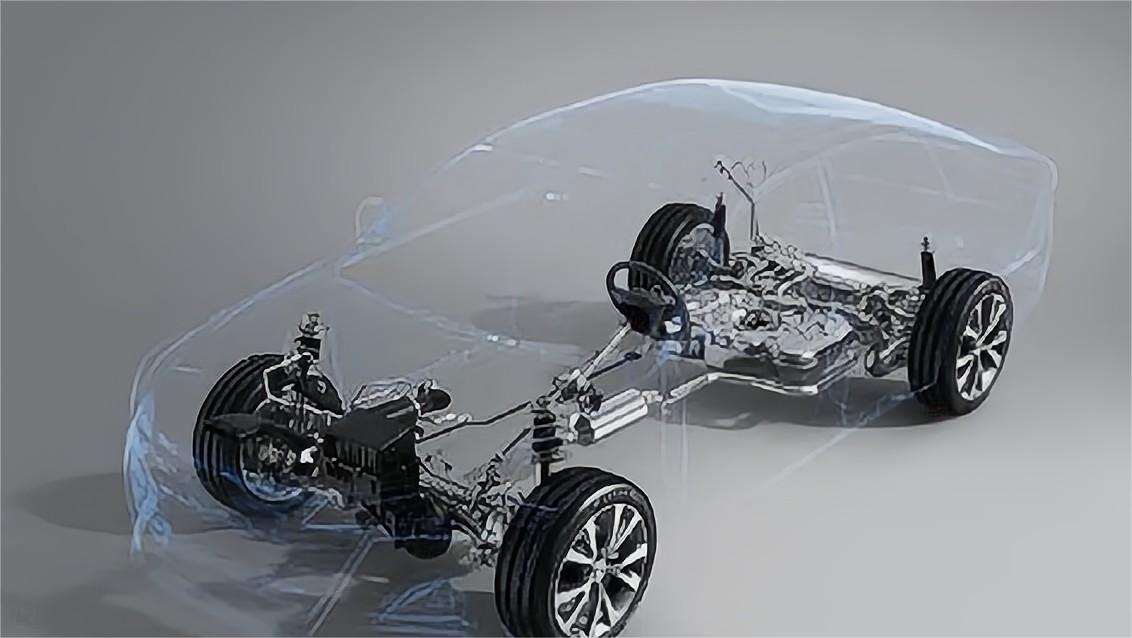
一輛自動(dòng)駕駛車(chē)輛可以安全的跑起來(lái)需要有穩(wěn)定可靠的硬件系統(tǒng)的支持,電源管理是必不可少的模塊;傳感器、線(xiàn)控平臺(tái)和計(jì)算平臺(tái)之間的通信以及路測(cè)數(shù)據(jù)的存儲(chǔ)下載系統(tǒng)、計(jì)算單元的設(shè)計(jì)及運(yùn)行以及遠(yuǎn)程管理系統(tǒng)設(shè)計(jì)也是非常重要的模塊:如何能保證整個(gè)硬件系統(tǒng)穩(wěn)定、低功耗、高效率是該模塊非常重要的工作。
作為自動(dòng)駕駛車(chē)輛,其自身的硬件系統(tǒng)設(shè)計(jì)與傳統(tǒng)汽車(chē)存在著很大的區(qū)別,包括自動(dòng)駕駛車(chē)輛獨(dú)有的線(xiàn)控系統(tǒng),傳感器布局等等,目前學(xué)校中都未能有如此先進(jìn)的專(zhuān)業(yè)課程給到學(xué)生學(xué)習(xí)。如果想從事該方向,最為合適的專(zhuān)業(yè)包括車(chē)輛工程、機(jī)械工程、自動(dòng)化等等,這里不僅僅需要傳統(tǒng)的機(jī)械結(jié)構(gòu)設(shè)計(jì),還包括電路設(shè)計(jì)、驅(qū)動(dòng)編寫(xiě)、電動(dòng)車(chē)的三電模塊等等,可以說(shuō)需要的是全方位的人才,也是挑戰(zhàn)最大的領(lǐng)域之一。
在未來(lái),自動(dòng)駕駛量產(chǎn)車(chē)的制造流程將會(huì)與目前傳統(tǒng)汽車(chē)行業(yè)有著極大的差別,而這時(shí)擁有相關(guān)專(zhuān)業(yè)領(lǐng)域知識(shí)的硬件系統(tǒng)工程師將會(huì)極為搶手,與時(shí)俱進(jìn)的知識(shí)理念將會(huì)帶給他們獨(dú)有的核心競(jìng)爭(zhēng)力。
四、軟件開(kāi)發(fā)及測(cè)試
作為自動(dòng)駕駛系統(tǒng),其中當(dāng)然少不了軟件開(kāi)發(fā)及測(cè)試的崗位需求,與此同時(shí),這一領(lǐng)域也是最多想要跨行跨專(zhuān)業(yè)的同學(xué)會(huì)考慮的熱門(mén)方向。事實(shí)上,如果擁有著較強(qiáng)的代碼能力與軟件功底,就極有機(jī)會(huì)通過(guò)該方向來(lái)跨行到自動(dòng)駕駛領(lǐng)域。與大多數(shù)系統(tǒng)不一樣的是,自動(dòng)駕駛領(lǐng)域的軟件開(kāi)發(fā)更加嚴(yán)格規(guī)范,自動(dòng)駕駛企業(yè)中底層的控制邏輯需要的是車(chē)規(guī)級(jí)的代碼質(zhì)量,這也對(duì)想要從事這一行業(yè)的人員提出了更高的要求。目前很多計(jì)算機(jī)專(zhuān)業(yè)的人才,都通過(guò)軟件系統(tǒng)開(kāi)發(fā)來(lái)涉足自動(dòng)駕駛,找到了適合自己的崗位領(lǐng)域。

除了實(shí)車(chē)的軟件開(kāi)發(fā),自動(dòng)駕駛仿真系統(tǒng)也是熱門(mén)方向之一。在大規(guī)模進(jìn)行路測(cè)不現(xiàn)實(shí)的情況下,自動(dòng)駕駛車(chē)輛真正能夠上路或者交付到客戶(hù)手中,需要進(jìn)行大規(guī)模的仿真驗(yàn)證及測(cè)試,而一套逼真和現(xiàn)實(shí)極為貼近的仿真系統(tǒng),將會(huì)對(duì)自動(dòng)駕駛算法帶來(lái)莫大的幫助。在數(shù)據(jù)為王的自動(dòng)駕駛時(shí)代,仿真系統(tǒng)也能提供極為豐富的場(chǎng)景案例及數(shù)據(jù),對(duì)自動(dòng)駕駛算法的更新迭代將起到關(guān)鍵的影響,也是未來(lái)非常有發(fā)展前景的領(lǐng)域之一。
五、總結(jié)
以上便是目前自動(dòng)駕駛行業(yè)中所需要的人才分類(lèi)整理,可以看到的是,自動(dòng)駕駛作為一門(mén)涉及到眾多領(lǐng)域及方向的新技術(shù),其無(wú)論從專(zhuān)業(yè)的復(fù)雜性重疊性,還是從知識(shí)更新迭代的速度來(lái)看,都對(duì)相關(guān)從業(yè)者造成了非常多的挑戰(zhàn)。隨著民眾對(duì)著新技術(shù)的接受程度逐漸提高,相關(guān)政策法規(guī)的完善支持,自動(dòng)駕駛最后的商業(yè)化落地只是時(shí)間問(wèn)題,而在之前從業(yè)者做好相應(yīng)的準(zhǔn)備,與時(shí)俱進(jìn)地學(xué)習(xí)前沿的知識(shí)理論,將是保證自身核心競(jìng)爭(zhēng)力的最好方式。
來(lái)源:智車(chē)科技






