
導讀:最近自動駕駛產業,也算是寒意融融,從歐美大眾福特燒完30億美金退出的Argo自動駕駛的投資,到Mobileye估值500億到只有170多億上市,好在上市保住了200億的市值,再到小馬智行國內外的裁員,等等。
其實這個現象早有征兆,首先是各個新勢力的高階智能駕駛系統交付延遲,再到國內智能駕駛供應商們爭先恐后的上車參與各種招標,高喊L4降維做L2,這都說明大家激進之后,發現水位下降了,那個裸泳的人可能就是我。
過去幾年整個產業都彌漫著激進和浮躁的味道,最有代表性的就是某些媒體的渲染,拿到Demo測評就喊開箱測評。資本和消費者都以為自動駕駛的發展就像坐火箭一樣,“咻”的一聲就來了,其實任何一個道路都是曲折坎坷,需要一步一步的走出來的,沒有任何珍貴的彌久的東西是一路直奔而來的。
公共開放道路的自動駕駛,場景復雜變量多,牽扯到自身以及交通安全的更是,他牽扯的是個人,家庭,群體的生命和安全,需要謹慎。所以,穩健的智能駕駛,需要基于交通場景的細化,滿足安全的基本條件下移動出行,而非一句話,或者幾個炫酷功能那么簡單。
所以本次我們借用Mobileye上市的資料和其發布的產品路線圖,來分享下基于視覺圖形人工智能的自動駕駛各個level一般的功能,以及其所需的硬件。希望給大家帶來一些信息和啟發對于自動駕駛的認識和思考。
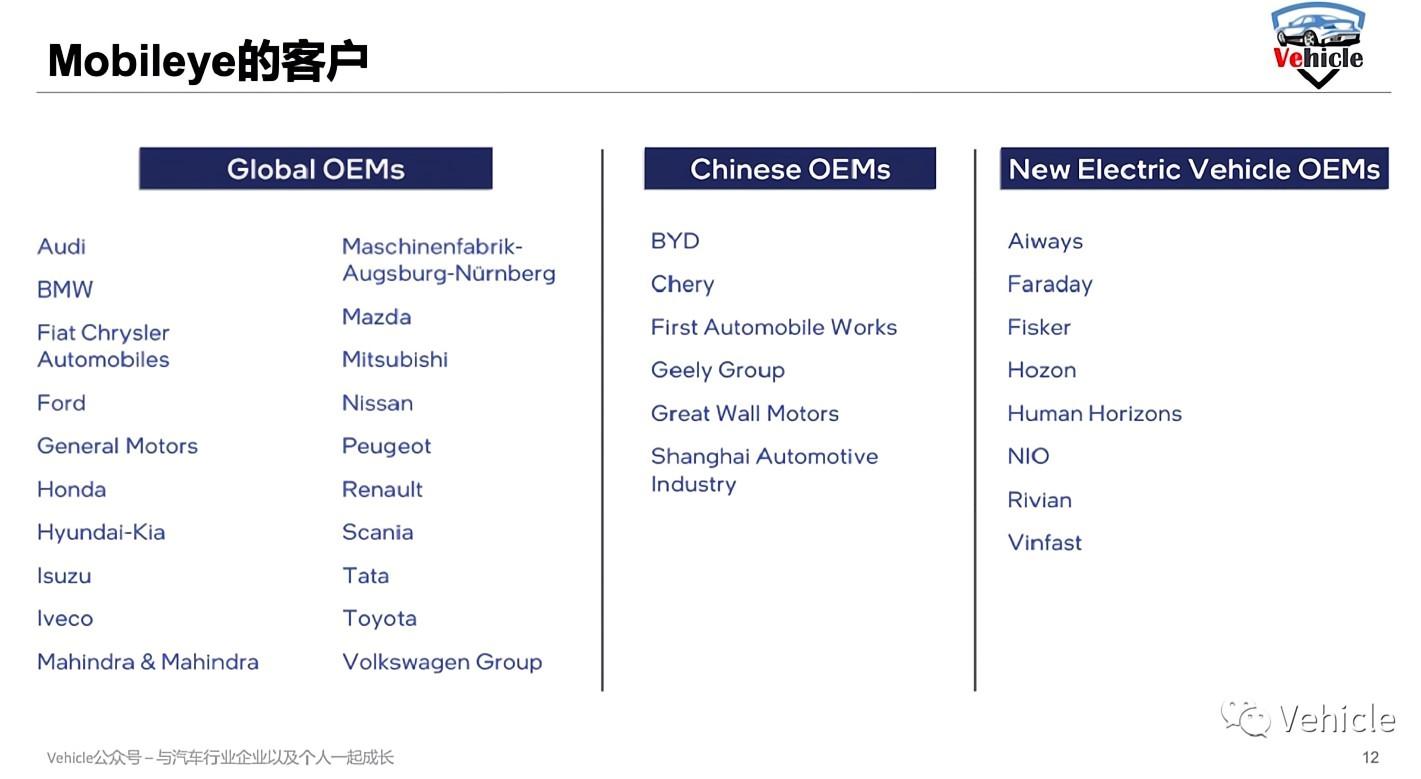
Mobileye其實是視覺智能駕駛的布道者,特斯拉最原始的方案就是采用Mobileye,國內小鵬,蔚來的智能駕駛都是從應用Mobileye開始,到Mobileye上市開始為止Mobileye芯片銷量高達1.17億片,但過去兩年以英偉達等為首的高算力,靈活,開放的軟硬件平臺崛起,讓Mobileye黯淡失色,Mobileye的母公司英特爾也算害怕了,抓緊將其推開上市,其產品序列也規劃拓展從輔助駕駛到高階智能駕駛再到移動出行服務平臺。
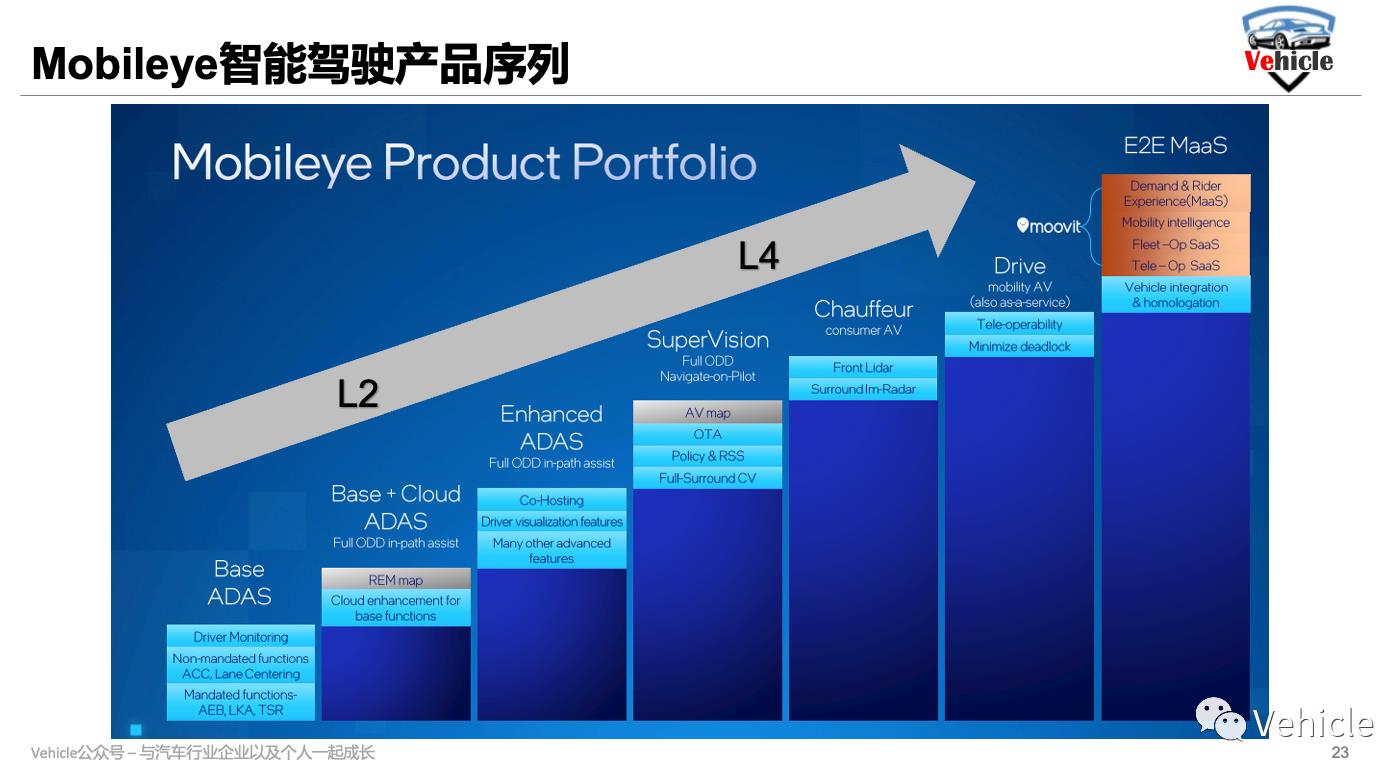
所以Mobileye的方案和產品路線也算代表典型的從L2步步升入到高階智能再到自動駕駛的路線的一種,可以窺探下自動駕駛道路上功能和硬件步伐。
當然讀產品功能序列之前可以先了解下Mobileye的底層技術方案,Mobileye引以為傲的是其視覺算法,視覺處理芯片,REM地圖,RSS安全駕駛策略,然后結合英特爾的資源正在拓展4d毫米波成像雷達以及激光雷達。

Mobileye將其產品功能序列分為:
Base Driver Assist基礎輔助駕駛功能。
Enhanced ADAS增強輔助駕駛功能。
SuperVision 超級視覺系列。
Chauffeur系列。
Drive系列。
分別從基礎輔助駕駛到L2+再到L3/L4以及RobOTAxi等無人移動出行物流服務。
自動駕駛開始的首先是基礎輔助駕駛功能,也就是L2以下的Base Driver Assist 功能,是ADAS 和自動駕駛解決方案系列的基礎,它包括關鍵的安全功能,例如實時檢測道路使用者、幾何形狀、語義和標記,以提供安全警報和緊急干預。主要是促進道路安全。
Mobileye的基礎L2以及以下駕駛輔助功能主要有:
NCAP類型的安全功能例如,AEB緊急制動,FCW前向碰撞預警,TSR交通信息識別,LKA車道偏離輔助。
僅僅依靠視覺能夠實現的通用安全法規,也是類似于AEB,LKA這類。
ISA 智能限速輔助。
ACC自適應巡航。
LCC劃線車道居中。
LDW車道偏離預警。
HLB自動近遠光燈。
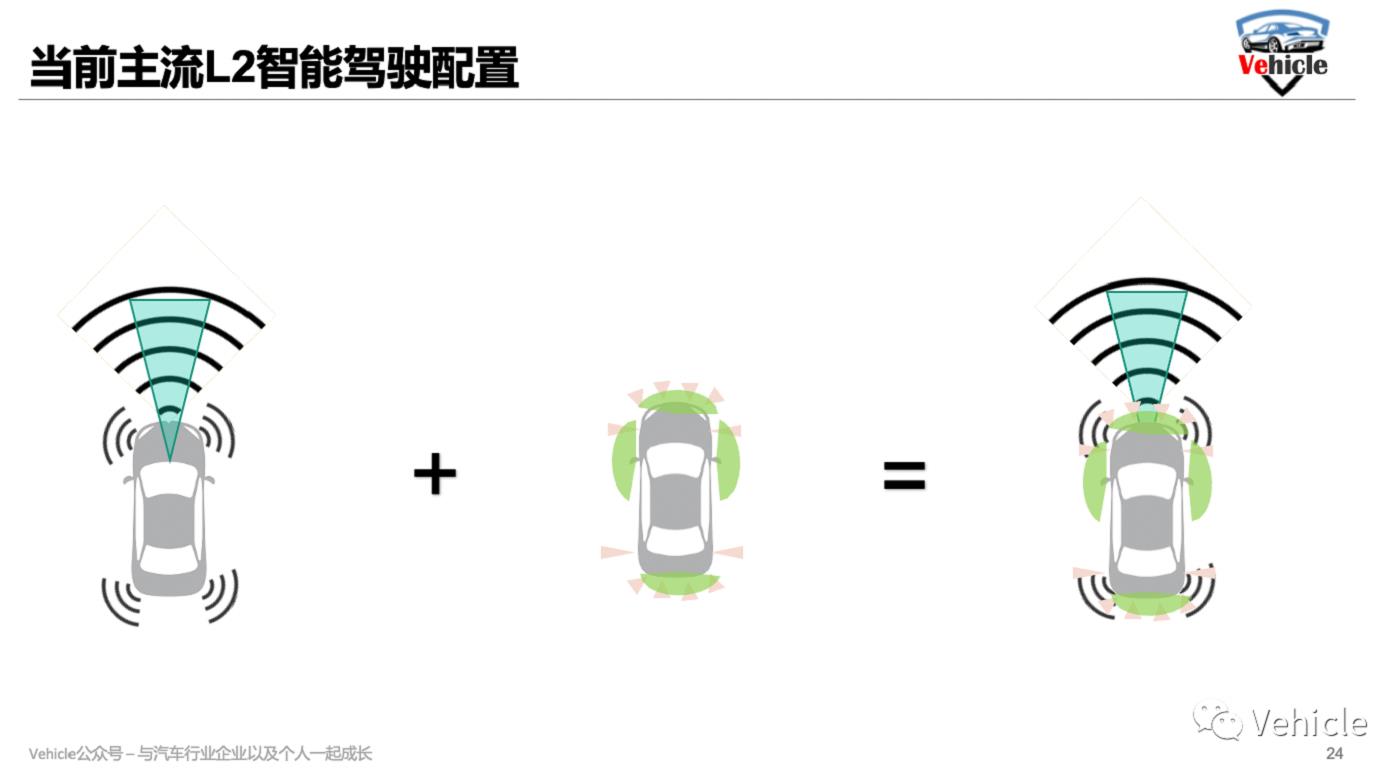
Mobileye 的Base Driver Assist 主要硬件組成:1個前攝像頭(可以是170萬像素100度視角,也可以是800萬像素120度視角)一個Mobileye Q4到Q6L的芯片處理。但當然,其中ACC功能要配合毫米波雷達實現的,畢竟Mobileye提到其單目攝像頭可以檢測距離的功能,但目前我沒有看過有直接用,不用毫米波冗余的。
Mobileye的Enhanced ADAS 增強型基礎L2駕駛輔助功能,又叫Cloud-Enhanced Driver Assist,它就是在基礎性L2的基礎上鏈接了其視覺眾包 REM地圖系統,可以提供的厘米級可行駛路徑精度、前方路徑的預見性和其他語義信息。
使用 REM地圖系統,通過橫向車輛控制(轉向控制)提供路徑輔助功能,即使在車道標記部分可見或不存在的情況下也能保持行駛路徑,并通過縱向車輛控制(加減速控制)根據交通標志、道路標記、路況和其他交通情況調整速度方向或危險。它還提供了前方道路的信息,包括幾何形狀和駕駛語義,以及通常復雜的語義指示與不同駕駛路徑的關聯(例如,交通信號燈和交通標志車道關聯),這些信息可以提前告知給汽車,對于智能底盤可以提供魔毯功能。
所以他可以提供的功能在原有基礎功能上再有:
LCC所有車道的車道居中(而非僅僅劃線車道,還支持大曲率彎道,具體多少曲率沒看到相關參數)。
TSR交通信息識別并帶速度調節。
TSR遮擋交通標志識別。
停車以及禮讓標志提醒。
維修路面區域提醒。
可訓練的泊車。
可安裝第三方應用。
Mobileye 的enhanced ADAS 硬件組成:
1個前攝像頭(可以是170萬像素100度視角,也可以是800萬像素120度視角)一個Mobileye Q4到Q6L中的芯片,和基礎輔助駕駛功能的硬件一樣。但可以看到此功能添加了可訓練泊車和可安裝第三方應用,這里其實可以看到歐美主機廠在推的50m左右的路徑軌跡記憶泊車,應該就是配合此項功能而來。
目前基本上絕大部分L2駕駛輔助都是這樣一個硬件配置。其中使用方案應該是絕大部分都是來自于Mobileye的方案,Mobileye截止到上市時1.17億塊芯片都應該是用在這個功能上。
目前歐美的福特的blue curise,大眾Drive assistant 2.5,通用的super cruise的L2+,日產的pro pilot 2.0 的L2+智能駕駛都是基于Mobileye的方案做加法而來。Mobileye本來靠這個基礎輔助駕駛活的好好的,而且其基礎輔助芯片EyeQ 4系列的芯片價格都在50幾美金也就是400人民幣左右。但是目前智能駕駛的內卷,讓Mobileye坐不住了,所以推出L2+也可以升級到L3/L4 而且兼顧泊車的Super vision 系列。
首先是SuperVision lite 61,它可以實現:
高速領航(基于REM地圖或者高精地圖)。
高速輔助(橫向,縱向控制)。
自動變道。
前后碰撞避免。
避險機動輔助(類似于大車避讓,VRU道路弱勢群體避讓)。
紅燈識別并且制動停車。
盲區監測。
環境虛擬,也就是類似于360環境映射。
DMS駕駛員監控。
支持EyeQ kit 工具自己開發定制。
泊車功能支持自動泊車,遠程泊車。
硬件組成:一個 EyeQ6 SoC,第三方提供的6個攝像頭和5個雷達。攝像頭預計包括前后兩個遠程 800萬像素攝像頭和4個300萬像素魚眼泊車攝像頭。采用其REM地圖。
可以支持硬件升級到L3/L4,升級1個前向激光雷達,1個前向FOP(front objective perception,原有攝像頭FOV100度左右,可能FOV 28度更窄更遠的攝像頭)攝像頭,可升級到L3級的60km/h以下的車道內高速領航,本車道內的危險進行安全停車。
但目前此套硬件和功能量產需要到2025年,他的特征是基于Mobileye自有方案可以進行高速領航服務同時視覺融合泊車,同時還支持EyeQ kit 工具自己開發定制。
SuperVision 52,應該就是目前吉利極氪上正在使用的方案,顯然以下很多功能應該還在驗證,目前并未完全釋放。Mobileye表示今年極氪通過OTA已經開通高速領航輔助(到寫稿時間我好像目前還沒有看到),然后2022年也就是今年年底OTA完整的Mobileye SuperVision功能。
點對點的領航輔助
高速/鄉下/主干道/城區領航
高速/鄉下/主干道/城區輔助
自主換道
前后碰撞避免
避險機動輔助
基于第三方硬件的DMS駕駛員監控
泊車應用運行在第三方ECU,不支持應用廠商基于Mobileye的EyeQ Kit的自主性開發。
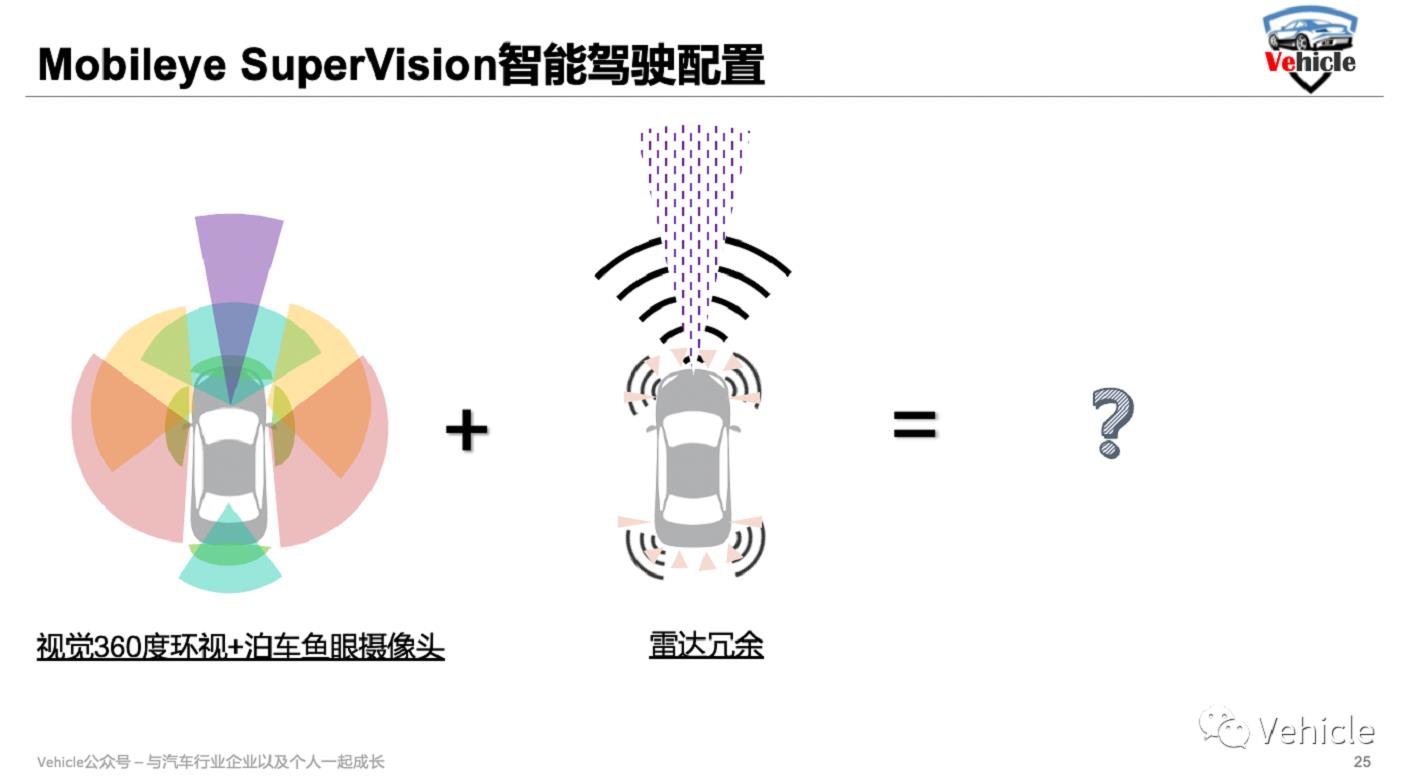
Mobileye SuperVision將采用11 個攝像頭(7 個遠程攝像頭和 4 個魚眼泊車攝像頭)提供全面的視覺感知環繞覆蓋。包括:
前置 1個800萬像素FOV視場角 120 度和一個800萬像素FOV視場角28 度的攝像頭、
兩個前置和兩個后置,共4個100度FOV視場角800萬像素攝像頭
一個后置60 度FOV視場角800萬像素攝像頭
四個安裝在側后視鏡和前后保險杠上的廣角 192 度泊車攝像頭。
使用2個Mobileye Q5H芯片提供算力支持。他使用由 REM 地圖系統支持,創建 360 度環境模型,并且 RSS 將駕駛決策限制為符合安全駕駛決策的基礎正式驗證模型。添加1個前向激光雷達,可以升級到L3/L4,功能例如L3級的60km/h以下的車道內高速領航,車道內的危險安全停車。
SuperVision 62,計劃2025年推出可以實現以下功能:
點對點的領航輔助
高速/鄉下/主干道/城區領航。
高速/鄉下/主干道/城區輔助。
自主換道。
前后碰撞避免。
避險輔助。
環境虛擬。
DMS駕駛員監控。
支持EyeQ kit 工具自己開發定制。
泊車功能支持L2級別的視覺融合自動泊車,遠程泊車。
他的硬件感知系統和SuperVision 52類似唯一區別的是采用了2個Mobileye Q6H芯片還支持泊車的處理。可以支持硬件升級到L3/L4,例如添加1個前向激光雷達,可升級L3級的60km/h以下的車道內高速領航,車道內的危險安全停車。Chauffeur是mobileye推出的針對于L3/L4的智能駕駛方案。功能分 Chauffeur 63 也計劃2025年推出。

他在SuperVision 62的功能上增加了L3/L4的以下功能:
高速/鄉下/主干道/城區全場景的領航輔助。
高速/鄉下/主干道/城區全場景的輔助。
高速/鄉下/主干道全場景的自主變道。
穿過機動車和非機動分離的路口。
L3/L4風險處置方案,將車駛到安全的停車處而不是本車道停車。
泊車方面都是L2級別的自動泊車,遠程泊車,自主代客泊車。
Chauffeur ultra的L3/L4應用增加了:
無保護轉彎(十字路口,對向有來車的場景)
無人在車上的自主代客泊車
Chauffeur的視覺感知硬件和SuperVision 52類似。采用11 個攝像頭(7 個遠程攝像頭和 4 個魚眼泊車攝像頭)提供全面的視覺環繞覆蓋。但他另外采用了6個4D成像毫米波雷達和一個FMCW激光雷達冗余。第一代解決方案將基于6個 EyeQ 5 High 芯片,而下一代解決方案將由3個EyeQ 6High 或者一個 EyeQ Ultra( AV-on-Chip)驅動。Mobileye Drive是L4級別自動駕駛的技術解決方案,也大概在2025年左右推出,將包Mobileye Chauffeur中的核心自動駕駛技術(360 度視覺、REM地圖、True Redundancy 雷達冗余覆蓋和 RSS駕駛策略),無需任何駕駛員在車里- 可以通過遠程操作和最小化需要人工輸入的情況來進行車輛人工干預。

Mobileye Drive 設計使用8個 EyeQ5High SoC 提供算力(而Mobileye Chauffeur上為6個 EyeQ ® 5High SoC ),到 2025 年,它將由一個 EyeQ Ultra 提供算力。
整體解決方案將為人員和貨物的移動出行,適用于各種車輛配置(如乘用車、專用吊艙/車輛、穿梭車和公共汽車)。
以上就為Mobileye的智能駕駛產品功能序列,總的來說典型先解決好安全風險,逐步拓展場景的方案,從簡單的封閉的高速主干道環境,到復雜開放的城市場景。
另外值得關注的是,風險處置的考慮,能進行安全停車,未來的風險處置支持自動行駛到安全地方停車,這是當前L2不論多少個加號都不會太考慮的問題,但要跨過L2也就是真正考慮自主駕駛的時候,智能駕駛系統必須需要考慮依靠自己進行風險處置,而不是甩給駕駛員。
最后,Mobileye還是對傳感器的多樣性考慮冗余,也是在技術路徑發展過程中比較謹慎和不冒進的表現。
智能駕駛,雖然在當前疫情以及地緣政治的影響下產生更多的困難點,但猶如我之前文章表述的,如果從技術方面考慮當前大數據,芯片的發展已經為人工智能在交通領域的應用提供了天時地利人和的機會,一切都在向前發展,慢一點可能是回歸理性和穩健,更利于行業的健康長期發展。
參考文章以及圖片:
1、Mobileye 2022投資者會議-英特爾
2、Mobileye 2022招股說明書-Mobileye
3、Mobileye RSS安全駕駛策略-Mobileye
4、The Mobileye Story 技術介紹 -Mobileye
5、REM Mapping Revolution 地圖介紹 - Mobileye
6、RSS - Mobileye與SFF - Nvidia 介紹 兩家安全策略
來源:Vehicle Pirate Jack






