
導讀:一直想找機會寫智能駕駛關于泊車的文章,也在之前文章提過很多次了,最近靠泊車起家的縱目科技正在謀求上市融資,融資需求超20億人民幣。看來市場對這個方面還是有所期待和不少故事,很多人估計也會想為什么泊車方面有市場?泊車有哪些技術和硬件?泊車未來怎么發展?
所以本文將結合自己相關想法和認知從:
泊車技術以及市場現狀;
泊車的功能和需求發展;
泊車技術的發展路徑;
幾方面去分享關于泊車的市場現狀,功能需求和技術路徑,希望能給大家一些信息和啟發。當然泊車這個課題也比較巨大,錯誤在所難免,如有希望大家在文章底部留言或者加入微信群交流探討學習。
一、泊車技術以及市場現狀
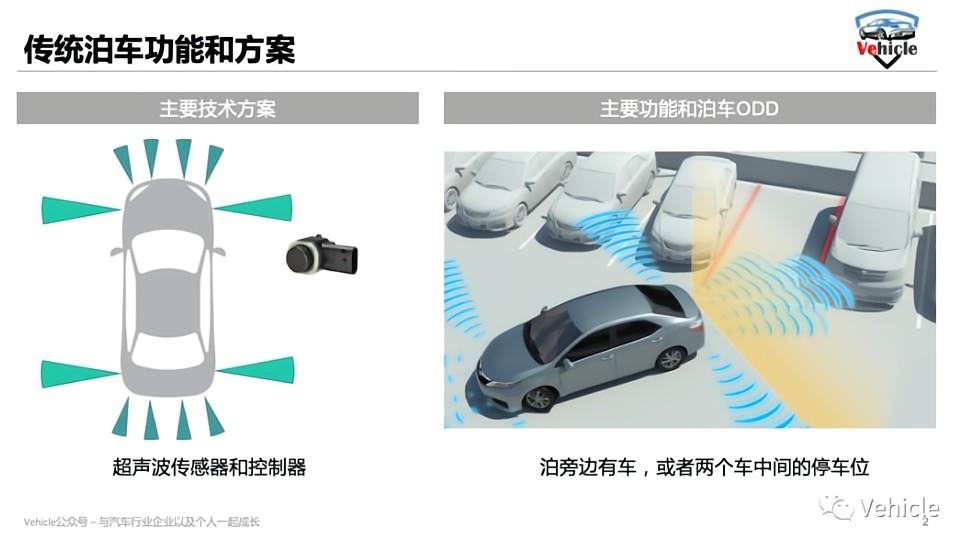
泊車其實在輔助駕駛時代,以歐美汽車占主導的市場的產品定義為“在泊車困難的場景下,進行輔助人工泊車”,來解決用戶的泊車痛點。那什么情況下會泊車困難呢?一般就是擁擠的停車場里面的車位,那么探測障礙擁擠最好,最便宜的傳感器就是超聲波,一種探測距離較短一般大概5-6m,成本便宜的超聲波雷達。
所以這個時候的輔助泊車的應用功能ODD只能泊旁邊有車,或者兩個車中間的停車位(外資品牌的車輛,不論豪華還是經濟型到文章發表為止依然是這樣),畢竟他靠超聲波傳感器探測障礙來實現。但這對于歐美主導的觀念也完全正確,畢竟百年開車文化的歐美泊車不是難事,而且如果旁邊沒有車那么也肯定不需要泊車輔助。
但是到了智能駕駛應用先鋒的國內以及汽車正在劇烈普及走入尋常百姓家的中國,智能泊車卻是另外一番景象:
- 自主/自動泊車已經成為自動駕駛的一環,畢竟要實現點到點的自動駕駛必須要能夠自主進入停車場泊車,駛出等。
- 中國大批初次駕駛的駕駛員,泊車是駕駛考試一大難關,現實中泊車成了考驗是不是老司機的一個難題。
- 360環視大屏等泊車輔助功能已經打敗了駕校教你看后視鏡的習慣,我們已經開始依賴和培養起使用泊車輔助類功能習慣。
所以從客戶需求來講,到路徑發展的方向來看,泊車相關的自動駕駛功能在中國還是實際存在,外資技術方案對于這塊當前還比較空缺,根據高工的數據2021年智能泊車前裝標配搭載率僅為11.93%,其按照預測,智能泊車前裝標配搭載率預計將在未來三年有望突破40%,所以泊車市場還有廣闊的空間。
二、泊車功能和需求發展
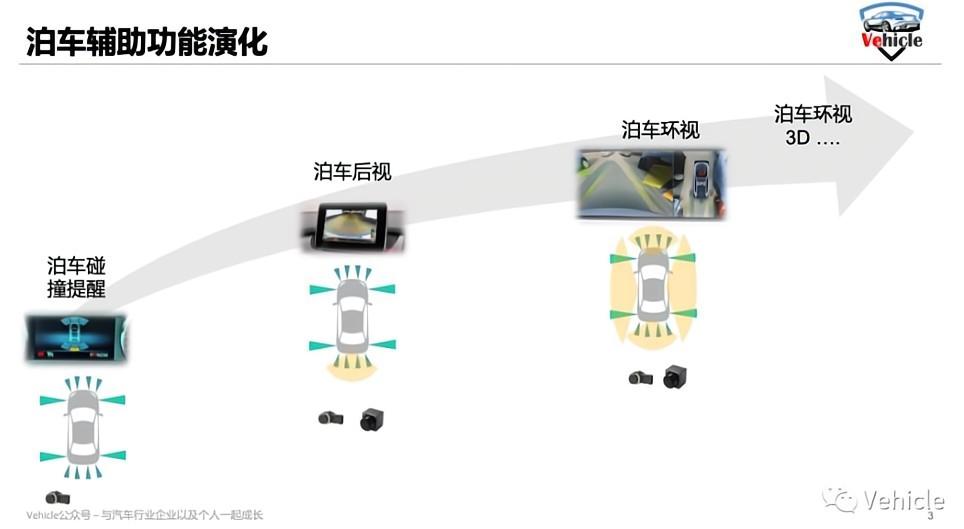
在泊車功能之前還有輔助泊車,通過攝像頭視覺或者超聲波雷達進行泊車距離和環境情況視覺提醒。當前這項功能基本硬件和軟件結構比較完善,12個超聲波傳感器和4個魚眼攝像頭是標配作為傳感器,超聲波傳感器負責泊車,環視攝像頭負責視覺呈現。到目前大家內卷的是環視的顯示精細以及3D全方位環境模擬。
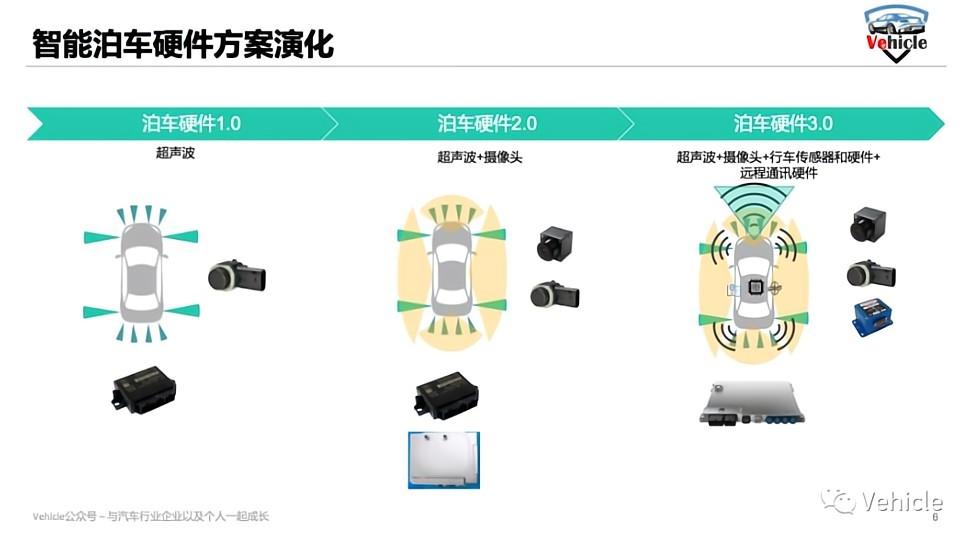
其實這個時候,視覺算法已經開始產生作用,一般環視攝像頭采用廣角的魚眼攝像頭,魚眼要拼接成360度適合人類看的屏幕圖像,這個時候需要圖像算法和芯片算力進行矯正拼接,所以從這個時候開始國內涌現不少基于德州儀器TI的TDA2等低算力芯片處理環視的方案,也就有了我們常說的“泊車盒子”泊車控制器雛形,12個超聲波以及處理芯片加上4個環視也就組成了典型的泊車硬件,我暫且稱他為泊車硬件1.0,這個時候超聲波信號處理輸入給整車控制,而環視可能是一個視覺處理硬件盒子或者融入座艙處理作為視覺呈現。
當然去掉12個超聲波傳感器的特斯拉,顯然其攝像頭的多少和布置方案可以映射歐美系就不太在乎泊車輔助以及環視這種“偽”需求。
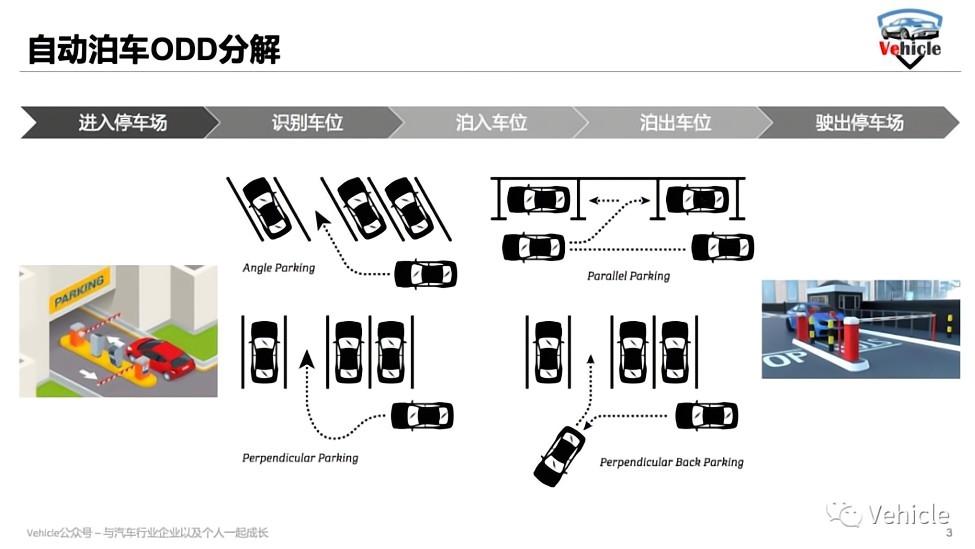
有了輔助泊車的技術之后,接下來到了泊車實施,泊車的功能需求分解,可以得到以下5步:
1、進入停車場
2、識別停車位
3、泊入車位
4、泊出車位
5、駛出停車場
那么所有的功能就基于以上五個場景需求的出發,按照人和車的距離分為:
* 人在車上泊車。
* 人在車可視范圍內泊車。
* 人遠離汽車自主泊車。
這樣的組合可以演化出各種泊車功能組合。但顯然如果人遠離汽車自主泊車,按照SAE的自動駕駛等級肯定是L4以及以上。
所以目前基本上所有關于泊車的功能都集中在人在車上或者人在旁邊監控,泊車和行車一樣,當前很少愿意跨過L2這個坎,但是大家都在積蓄等法規完善或許都是直接跳躍進去L4以上。
三、泊車技術的發展路徑
目前對于泊車功能,最先開始發展,也相對成熟的功能是識別車位,泊入車位。
一般發展路徑分為:
* 超聲波感知泊車,他只能泊旁邊有車,或者兩個車中間的停車位。他根據超聲波識別預估旁邊的參考車從而泊車。目前絕大部分外資品牌的車輛,不論豪華還是經濟型到文章發表為止依然是這樣的泊車功能,所以這也就給了國內不少創業機會,例如最近上市融資的縱目科技就是靠泊車技術。另外還有泊車的自動與半自動,在燃油車時代很多換擋以及制動執行器是機械的,但泊車需要更換前進和倒退的檔位,所以存在自動泊車只能輔助轉向但換擋和剎車依然需要駕駛員更換。但到了電氣化時代這些問題基本解決,所以絕大部分都全自動泊車。
* 視覺融合感知泊車,他基于視覺人工智能車位識別算法,不管是否有參考車,可以識別從垂直,平行,斜向,甚至自創車位(比亞迪漢的泊車可以自創車位)進行泊車。目前新勢力以及國內主機廠基本都采用此類,或者走向此類泊車。
以上兩個為泊車主流方案,但還有一些細小的問題,就是泊車的方向,當前國內泊車基本為車尾泊入,未來是否需要支持車頭泊入也是開發在探討的。
通過以上功能需求可知道,此時泊車的硬件需要超聲波和視覺傳感器信息進行融合處理,那么這個時候由超聲波和視覺傳感器融合輸入處理的硬件也就組成了當前主流的泊車硬件2.0。
當然有泊入就還有泊出車位,目前能支持泊出的也不少,但更多的泊出是直行幾米,也就是把車頭開出來。另外一種高級的泊車是車輛能夠泊出整個車位而且與道路平行,需要達到這種方式,那么泊車硬件2.0顯然無法實現,因為泊車所需要的路徑空間必須要足夠大才能夠進行路徑規劃。所以從這里開始萌芽了泊車硬件3.0開始使用整車的其他零部件例如通訊,其他傳感器等。
遙控泊車,遙控泊車基本上通過藍牙,蜂窩數據,UWB等無線通訊方式與車輛通訊交互實施指令控制,遙控泊車經歷三種階段:
遙控玩具型前后左右控制,很早之前的BYD采用過這種,典型的就是鑰匙還帶一個遙控,但這種方式應該沒有跟進和繼續發展的。
前后移動遙控泊車,基于泊車1.0硬件配置,手指持續按壓app按鈕進行前后移動,當前主流都為這種還有特斯拉的召喚summon功能。
駕駛員在車上識別車位之后,人下車進行遙控泊入車輛,但不支持泊出,理由和上段一樣。
最后一種泊車就是從進入停車區域開始自動,搜尋車位,泊入車位的方式。這里就會存在兩個分支:
一個是人需要在車上也就是我們目前正在發展的L2+泊車例如小鵬等的記憶學習泊車,百度重場端和云端地圖的泊車。
另一個是人毋需在車上的,自主進入停車場,泊車,泊出,離開停車場也就是AVP,這種屬于L4級別,目前更多的是重場端概念開發。
但這兩個分支比較明顯的界限就是SAE的自動駕駛等級標準以及圍繞這個等級標準的功能開發和追責定義,底層技術方案目前沒看到多大差異,都是基于單車智能或者重場端方案開發。此時對于泊車硬件卻不那么明顯了,進入泊車硬件3.0時代也就是不會嚴格區分泊車硬件進行行車和泊車融合一體,也就是當前熱詞“行泊一體”,同時調用所有傳感設備,使用大算力芯片。
下面分享兩個目前技術路徑:
記憶泊車(HPP)是當前比較火的一個泊車技術,它在全自動泊車基礎上,可在相對更遠距離和更復雜環境中自主完成泊入和泊出操作。當前的記憶泊車主要建立在(Simultaneous Localization and Mapping,即時定位與地圖構建)技術基礎之上,主要有VI-SLAM,利用Vision 視覺和Inertial慣量傳感器也就是IMU,學習、記錄并儲存用戶常用的下車位置、停車地點及泊車行進軌跡,建立常用泊車路徑的環境特征地圖,車輛再次經過該地點時,系統將復現用戶的泊車路徑來代替駕駛員完成停車場內最后一段距離的低速駕駛和泊車。
目前記憶泊車有幾大技術難點,基于攝像頭的視覺特征的抓取算法,記住地點的特征信息,地面復雜的光線和更多變的環境很難讓攝像頭抓住。所以記憶泊車目前更多的是在地下停車場,例如小鵬的記憶泊車;或者是非常短距離的地面學習泊車例如歐美基于法雷奧方案的50m記憶泊車。
另外,記憶泊車的路線是靠GPS地點記憶和IMU軌跡記憶的,而兩者結合的丟失GPS信號的記憶精度在2km左右。所以記憶泊車一般都在2km之內,要不然車輛位置無法保證。
當然目前更多傳感器的加入,例如激光雷達輔助構建特征地圖以及定位。可以實現長距離記憶以及地面泊車,典型的就是類似于高仙機器人開發的地面掃地機器人技術,華為提供方案的極狐和阿維塔前面三個激光雷達的方案。當然有激光雷達加入的泊車方案,更恐怖的是每個車都可以掃地圖構建地圖,未來是不是可以眾包停車場地圖也是一個方向。
另外一個技術方案就是構建停車場場端高精地圖以及場端定位輔助設備例如激光雷達,即UWB。那么自主泊車還要討論的一個問題就是高精度充電泊車,未來如果自主泊車對于電動車來講自動充電也會是個問題,所以精確到厘米級的高精準定位會是一個需要考慮的問題。
泊出停車區域的這種功能目前鮮有,基于場端的泊出停車區域有,例如百度在威馬上的方案。單車智能例如小鵬和大眾等目前都沒有看到逆向的泊出停車場的功能,希望大家留言交流為什么,技術難點,還是無應用需求?
另一個比較特殊泊出功能是特斯拉的智能召喚smart summon功能,基于地面GPS和泊車傳感器的導航功能,他的召喚距離在距離用戶手機65米之內,最大行駛距離145米,而且需要用戶時刻保持視線的監控。這項功能在北美等可能適用,在中國城市地下停車場多的地方難以適用。
四、總結
自動泊車相關類的功能,很多人都說是“偽需求。歐美汽車也確實秉承了這個觀念,所以可以看到當前外資品牌的泊車功能,絕對部分只能泊旁邊有車,或者兩個車中間的停車位。但是對于泊車,我們開始看到目前國內品牌應用以及供應鏈在這方面開始引領也看到了外資品牌在這方面的規劃布局,所以泊車國內的技術以及供應鏈還是很有潛力。
另外一點是通往全自動駕駛的道路,總不能缺少自動泊車,要不然點對點只能是路對路而缺少了閉環。當然目前對于泊車方面的供應鏈,國內完善也競爭相對激烈例如有德賽西威,百度,縱目,魔視,禾多,智華科技等等。但還以不少行泊一體的方案例如華為,freetech,東軟等等在行車方面做的供應鏈。但目前還在白家爭鳴的時代,市場大,技術路線沒有統一,很多機會。
參考文章:縱目科技科創板招股說明書-縱目
作者:Vehicle Pirate Jack






