
導(dǎo)讀:自動(dòng)駕駛中常用的智能傳感器主要有激光雷達(dá)、毫米波雷達(dá)和車載攝像頭。車載攝像頭作為一種應(yīng)用范圍最廣的視覺傳感器,目前仍將是占主導(dǎo)地位的車用智能傳感器。
蘇州艾微視圖像科技有限公司為自動(dòng)駕駛打造高品質(zhì)的車載鏡頭和攝像頭,目前有完整地組裝及測(cè)試解決方案。而黑燈工廠加上MES系統(tǒng)的自動(dòng)化生產(chǎn)線,更能讓車載攝像頭模組全自動(dòng)智能化產(chǎn)線如虎添翼。
01車載攝像頭的重要性
特別是自動(dòng)駕駛常用的傳感器有車載攝像頭,激光雷達(dá),毫米波雷達(dá)等,當(dāng)前的交通法規(guī)中,視覺仍然是最主要的感知手段,在未來很長一段時(shí)間攝像頭都將在車載智能傳感器占據(jù)主導(dǎo)地位。
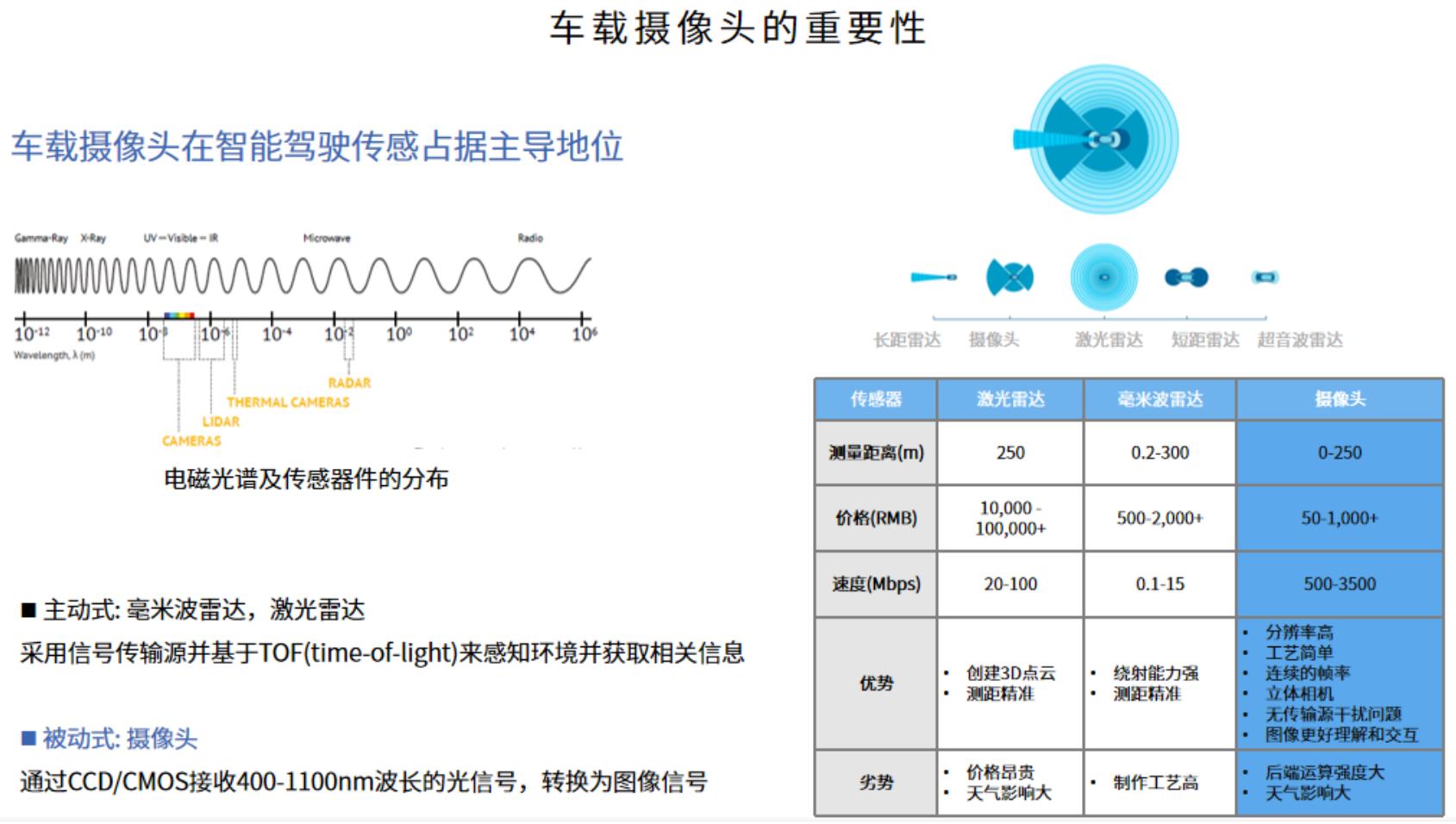
從最早的倒車影像、行車記錄儀、流媒體后視鏡等用來記錄或拓展駕駛員感官功能的應(yīng)用,現(xiàn)在的車載鏡頭已應(yīng)用于自動(dòng)泊車(APA)攝像頭、駕駛員和乘客監(jiān)控系統(tǒng)(DMS和OMS)攝像頭,雙目和三目攝像頭也已成熟量產(chǎn)。7月1日,電子后視鏡新國標(biāo)GB15084-2022實(shí)施,意味著國內(nèi)汽車可以用電子外后視鏡(CMS)取代傳統(tǒng)后視鏡,開啟了CMS量產(chǎn)元年。
從車載攝像頭的發(fā)展歷史看,一個(gè)方向是更多應(yīng)用場(chǎng)景;另一個(gè)方向是感知,需要更高的分辨率和更小的像素單元。對(duì)鏡頭的要求也越來越多,現(xiàn)在車載攝像頭的鏡頭涵蓋了更多焦距、更多視場(chǎng)角、更遠(yuǎn)調(diào)焦距離,而車載攝像頭的測(cè)試也更加嚴(yán)格,目前有高低溫測(cè)試或Flare測(cè)試;自動(dòng)駕駛用的攝像頭還要做內(nèi)參標(biāo)定,通常,這些測(cè)試只體現(xiàn)在模組端,鏡頭端測(cè)試變化不大。
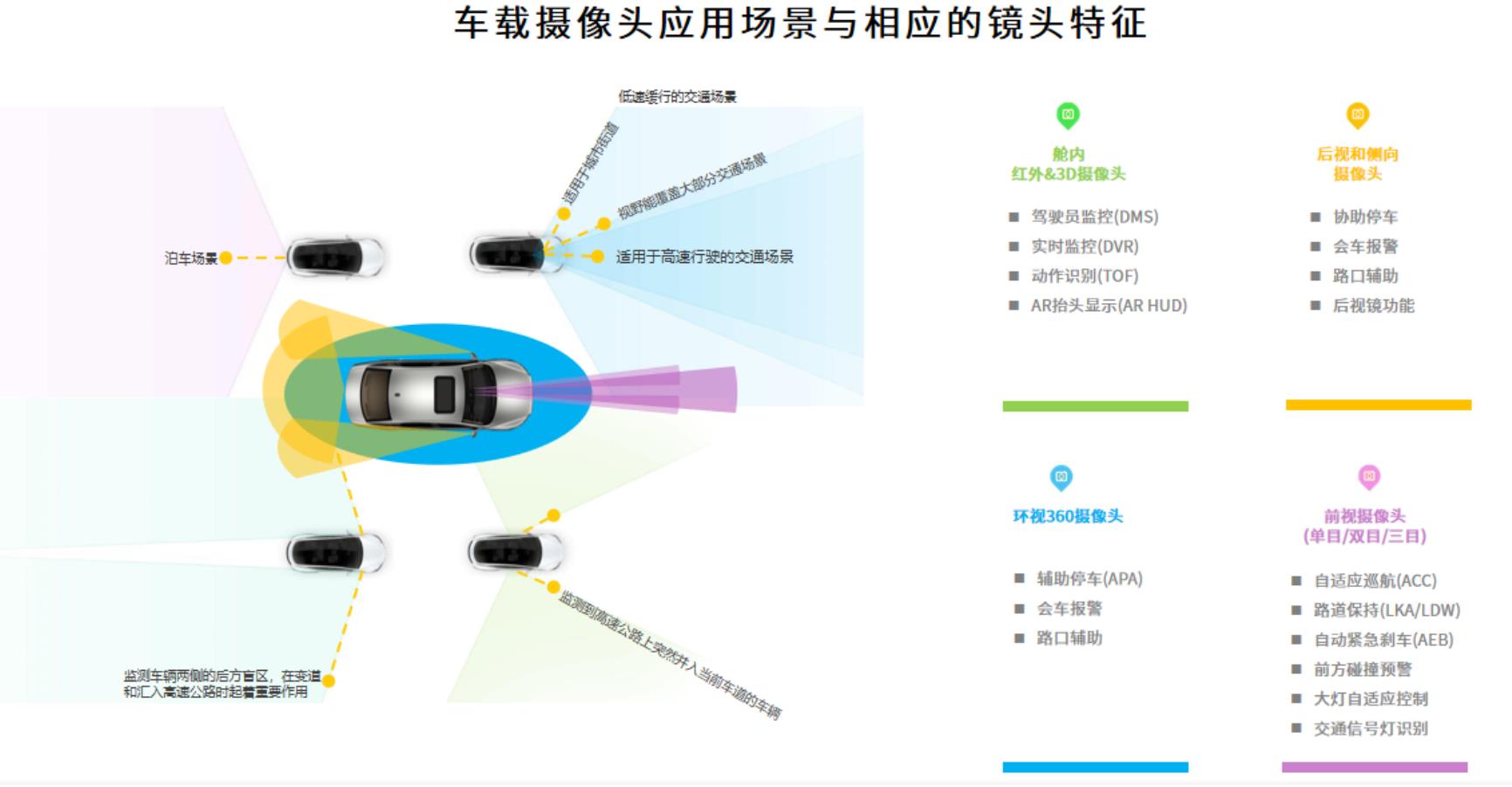
目前車載攝像頭的應(yīng)用場(chǎng)景主要有四大類:艙內(nèi)、側(cè)后視、環(huán)視及前視;每個(gè)場(chǎng)景使用的攝像頭都有不同的功能,對(duì)鏡頭的要求也不一樣,比如艙內(nèi)攝像頭,需要在可見光和紅外光下成像;前視攝像頭需要隔著擋風(fēng)玻璃成像,是目前鏡頭測(cè)試中比較特殊的應(yīng)用。
車載攝像頭的主要成本構(gòu)成包括:圖像傳感器、光學(xué)鏡頭和模組封裝。其中光學(xué)鏡頭約占模組成本的20%,雖然價(jià)格沒有圖像傳感器高,但是其重要性最高,因?yàn)楣鈱W(xué)鏡頭是車載攝像頭成像的第一步。攝像頭成像質(zhì)量的好壞70%都是由鏡頭決定的。未來幾年,車載攝像頭還將持續(xù)發(fā)展,艾微視認(rèn)為,無論是從車載鏡頭的功能性、特殊性和成本來考量,對(duì)車載攝像頭進(jìn)行有針對(duì)性的測(cè)試非常必要。
02自研車載鏡頭測(cè)試方案解決用戶痛點(diǎn)
針對(duì)鏡頭最基本的光學(xué)參數(shù):MTF(離焦)、焦距、場(chǎng)曲、像散等,艾微視開發(fā)了鏡頭測(cè)試設(shè)備。采用鏡頭產(chǎn)線的主流逆投影方式測(cè)試鏡頭光學(xué)參數(shù),將物像位置顛倒在倒像位置,利用目標(biāo)圖卡和多只成像CCD,測(cè)試離焦或焦距等最基本的光學(xué)參數(shù)。
艾微視的逆投影鏡頭測(cè)試設(shè)備的測(cè)試項(xiàng)目涵蓋:軸上MTF/軸外MTF、EFL/FFL、景深/DOF、場(chǎng)曲、像散、像面傾斜、相對(duì)照度。對(duì)主流8倍攝像頭進(jìn)行的測(cè)試表明,測(cè)試效果非常好,測(cè)試項(xiàng)目都可以量化,數(shù)據(jù)可以和鏡頭規(guī)格書完美對(duì)應(yīng),誤差極小。

多年來,艾微視一直在車載攝像頭模組AA設(shè)備領(lǐng)域耕耘,結(jié)合在模組AA方面的經(jīng)驗(yàn),以離焦曲線理論模擬AA效果,多維度分析鏡頭的品質(zhì)。以前的鏡頭測(cè)試設(shè)備只是從某個(gè)參數(shù)達(dá)到的閾值來判斷鏡頭的等級(jí),而多維度判斷更有助于挑選出合適的鏡頭。
車載鏡頭的雜散光測(cè)試非常必要。但鏡頭雜散光測(cè)試設(shè)備一直處于車載攝像頭模組廠不太受重視的地位,很多鏡頭廠商的鏡頭雜散光測(cè)試還是采用比較原始的人工判斷方式,既效率低下又可能出現(xiàn)漏判誤判。
最新發(fā)布的車載攝像頭圖像質(zhì)量標(biāo)準(zhǔn)IEEE P2020討論稿已將雜散光測(cè)試作為一項(xiàng)重要內(nèi)容,因?yàn)殡s散光會(huì)降低圖像對(duì)比度和圖像質(zhì)量,而且會(huì)遮擋目標(biāo)信息,使整個(gè)系統(tǒng)失效。
車載攝像頭的成像環(huán)境和光照環(huán)境比較復(fù)雜,比如逆光環(huán)境中需要面向太陽光成像,還有迎面來車的大燈或路燈、信號(hào)燈,以及遍布攝像頭視野各個(gè)位置的各種車燈。
引起雜散光最主要的原因是透鏡和鏡頭,包括透鏡表面臟污或鍍膜不良,造成光線在透鏡表面發(fā)生折反射;透鏡邊緣沒做涂黑處理、結(jié)構(gòu)面未做消光處理也會(huì)發(fā)生反射;強(qiáng)光下孔徑光闌強(qiáng)光衍射也是雜散光的一個(gè)重要來源。此外,探測(cè)器表面的保護(hù)玻璃也會(huì)引起雜散光,甚至封裝工藝、金手指或PCB表面的元器件反光也會(huì)造成雜散光。
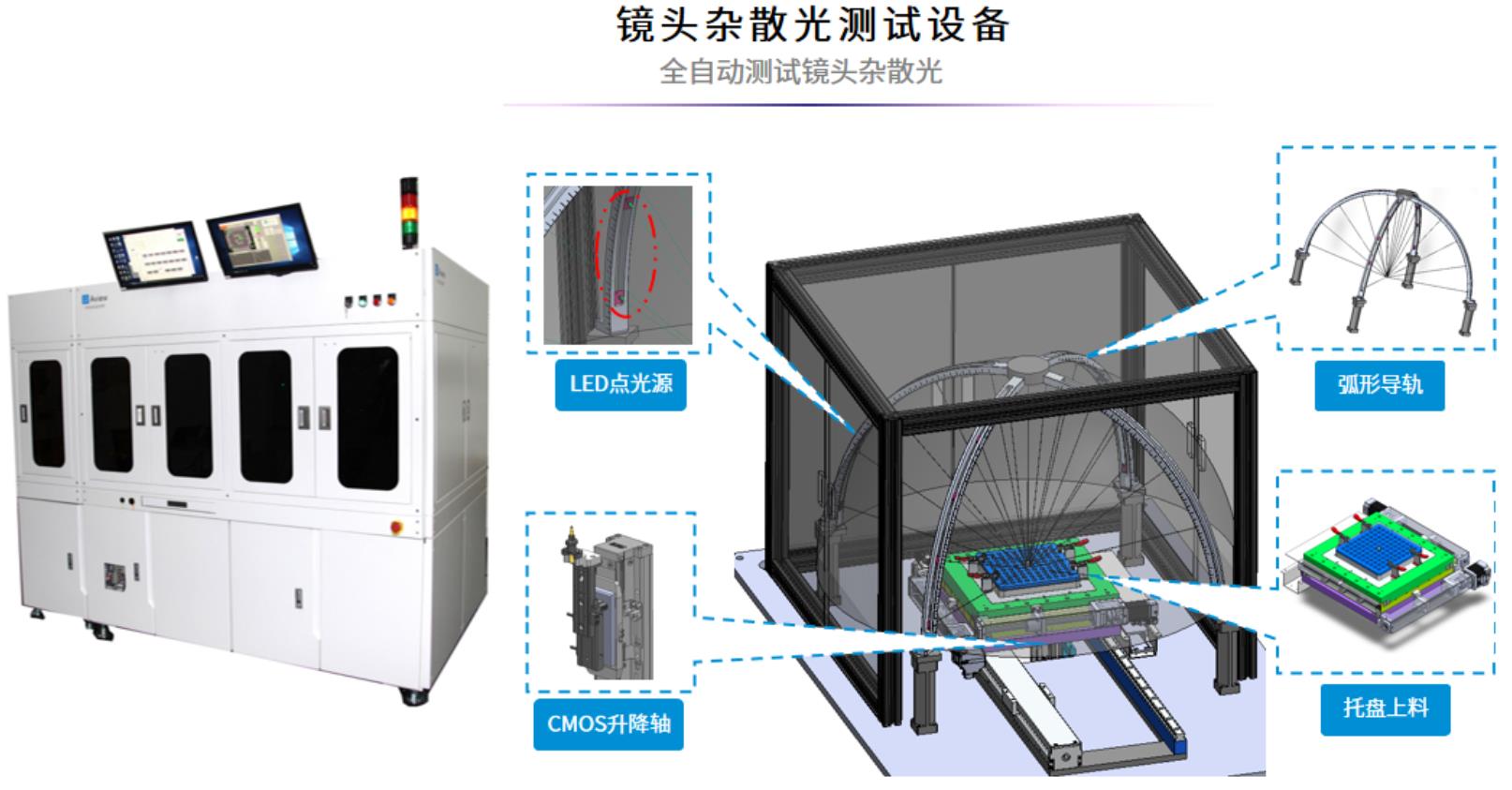
針對(duì)這個(gè)問題,艾微視開發(fā)了鏡頭雜散光測(cè)試設(shè)備,采用與逆投影測(cè)試設(shè)備類似的成像架構(gòu),只不過不是采用逆投影方式。該設(shè)備的弧形導(dǎo)軌上有LED點(diǎn)光源,經(jīng)過鏡頭在CMOS上成像,根據(jù)成像效果來判斷雜散光狀態(tài)。

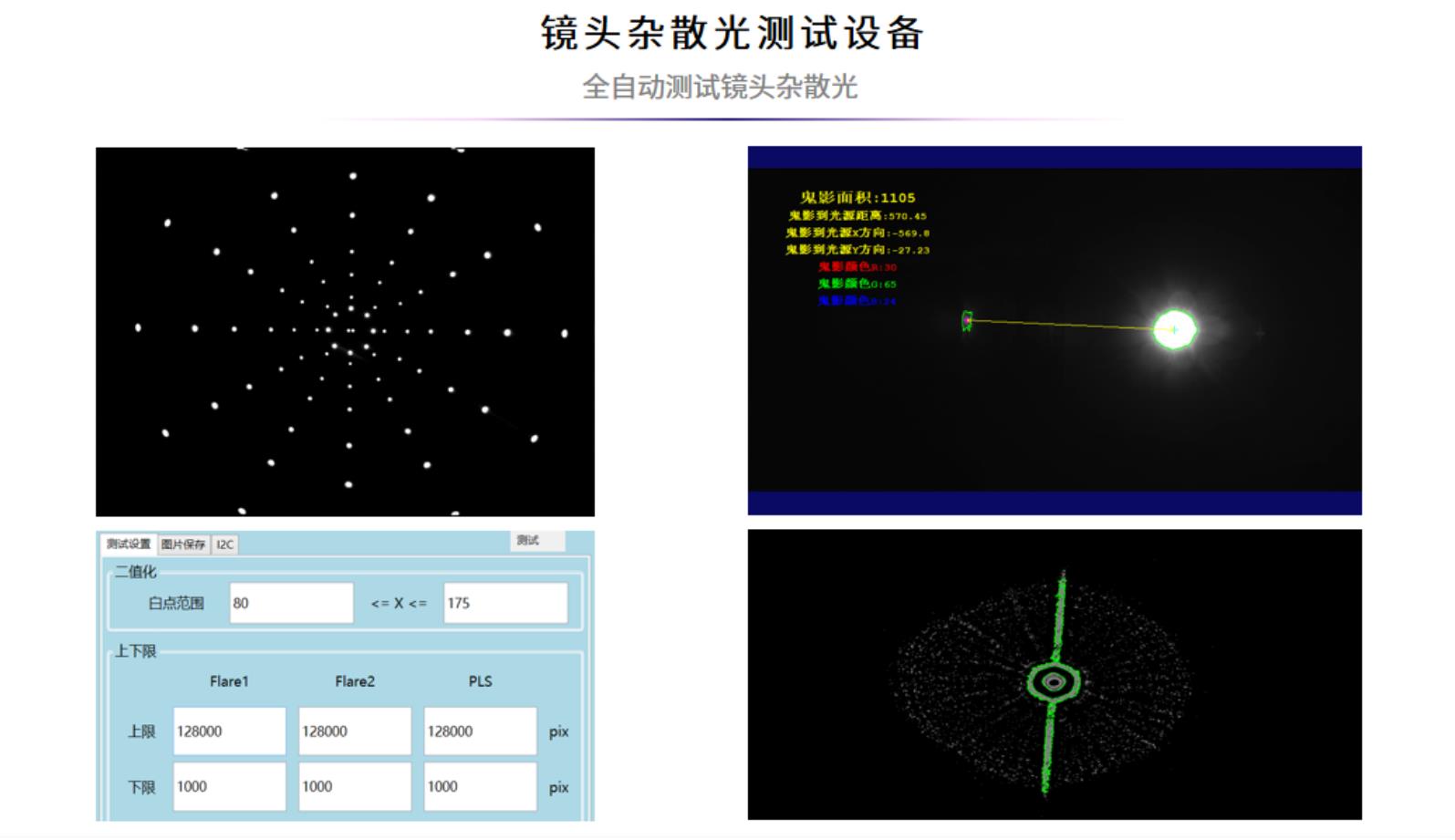
雜散光測(cè)試軟件也是艾微視自主開發(fā)的,它和已有的雜散光測(cè)試方法有一些區(qū)別。現(xiàn)在的雜散光測(cè)試(如ISO 9358)是用測(cè)量點(diǎn)擴(kuò)散函數(shù)的方法來測(cè)試雜散光,而艾微視結(jié)合了機(jī)器視覺方面的經(jīng)驗(yàn),通過點(diǎn)光源成像的灰度值來判斷雜散光,不僅可以準(zhǔn)確區(qū)分非目標(biāo)光源以外的異常灰度值,還可以根據(jù)灰度值異常、形態(tài)學(xué)特征區(qū)分鬼影、光刺或炫光等不同類型雜散光,更便于追溯引起雜散光的原因。
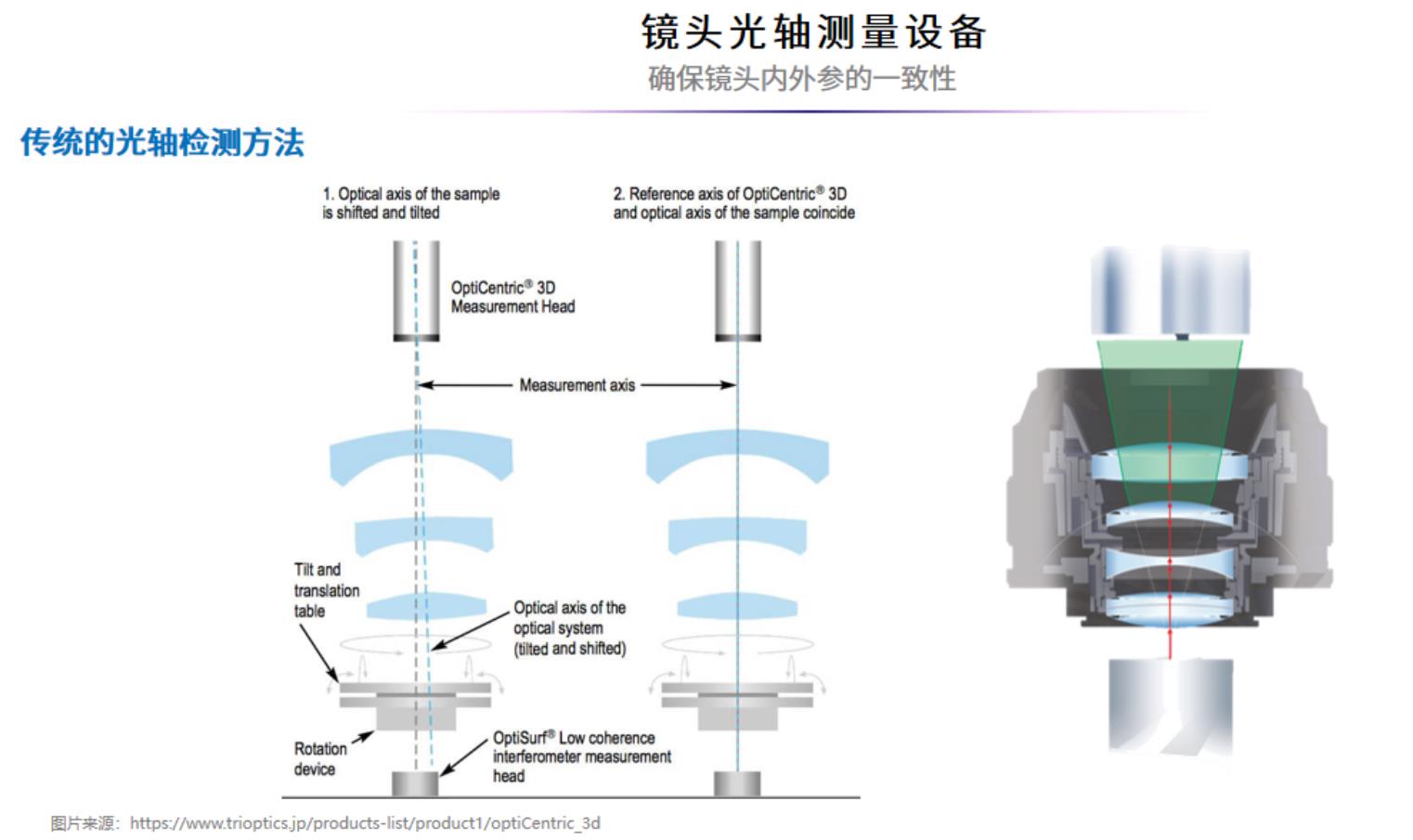
現(xiàn)在,鏡頭廠商是用偏心儀來測(cè)試鏡頭的光軸,將鏡頭固定在一個(gè)旋轉(zhuǎn)平臺(tái)上,繞著鏡頭的機(jī)械中心軸旋轉(zhuǎn),觀察鏡頭上方十字標(biāo)在鏡頭下方的成像傳感器上的成像,通過成像畫出圓的半徑;還要測(cè)試鏡頭的放大倍率來計(jì)算鏡頭的光軸夾角,以指導(dǎo)鏡頭廠商裝調(diào)出更好的鏡頭。實(shí)踐證明,艾微視的鏡頭光軸測(cè)量設(shè)備測(cè)試得出的鏡頭光軸更符合實(shí)際應(yīng)用場(chǎng)景。
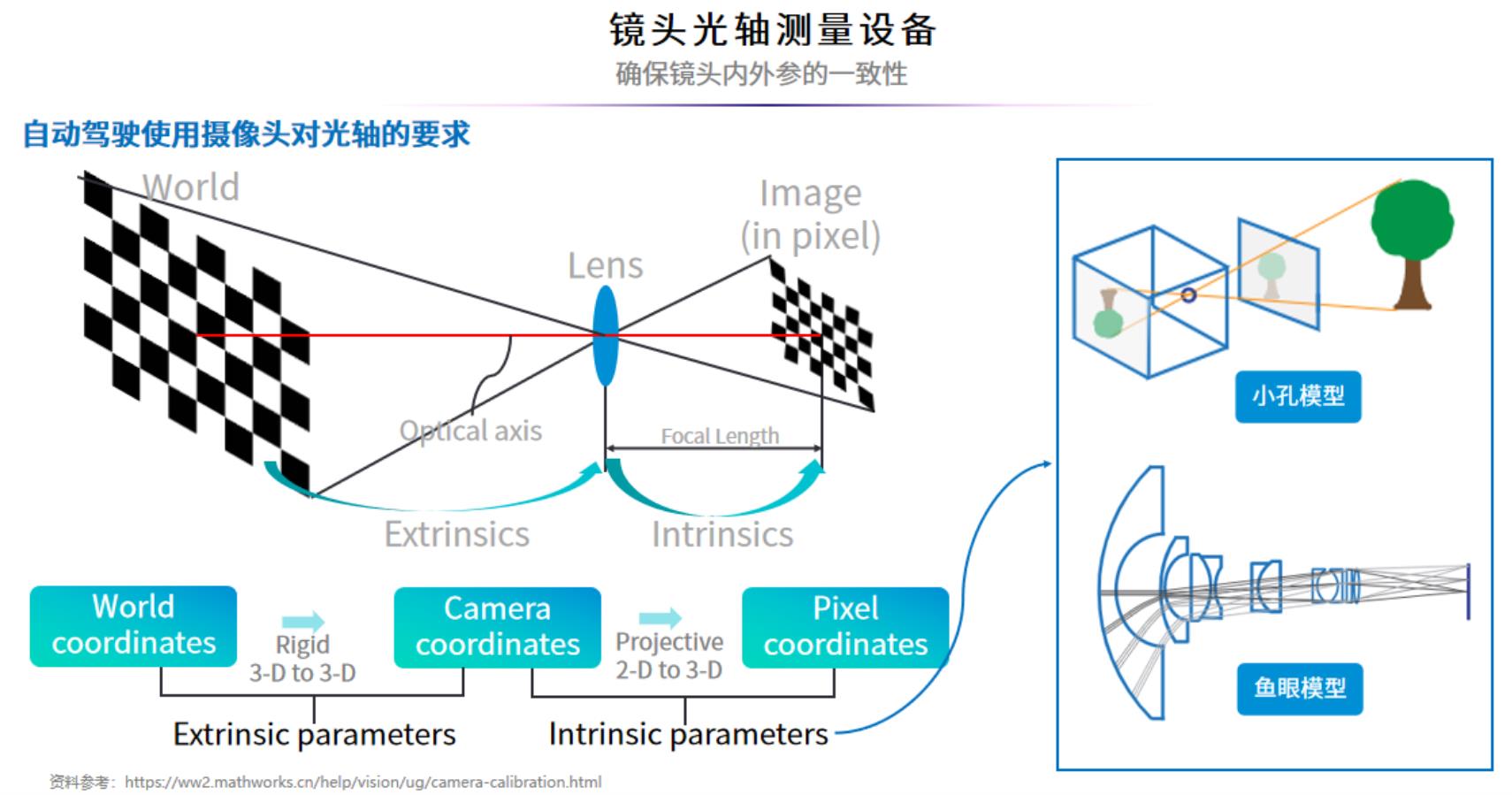
在自動(dòng)駕駛中,要求對(duì)攝像頭的光軸進(jìn)行標(biāo)定,以建立世界坐標(biāo)系和圖像坐標(biāo)系的映射關(guān)系。首先將世界坐標(biāo)系下的信息變換到相機(jī)坐標(biāo)系,然后再將投影變換到像素坐標(biāo)系,其中從相機(jī)坐標(biāo)系變換到像素坐標(biāo)系的過程涉及到攝像頭的內(nèi)參。
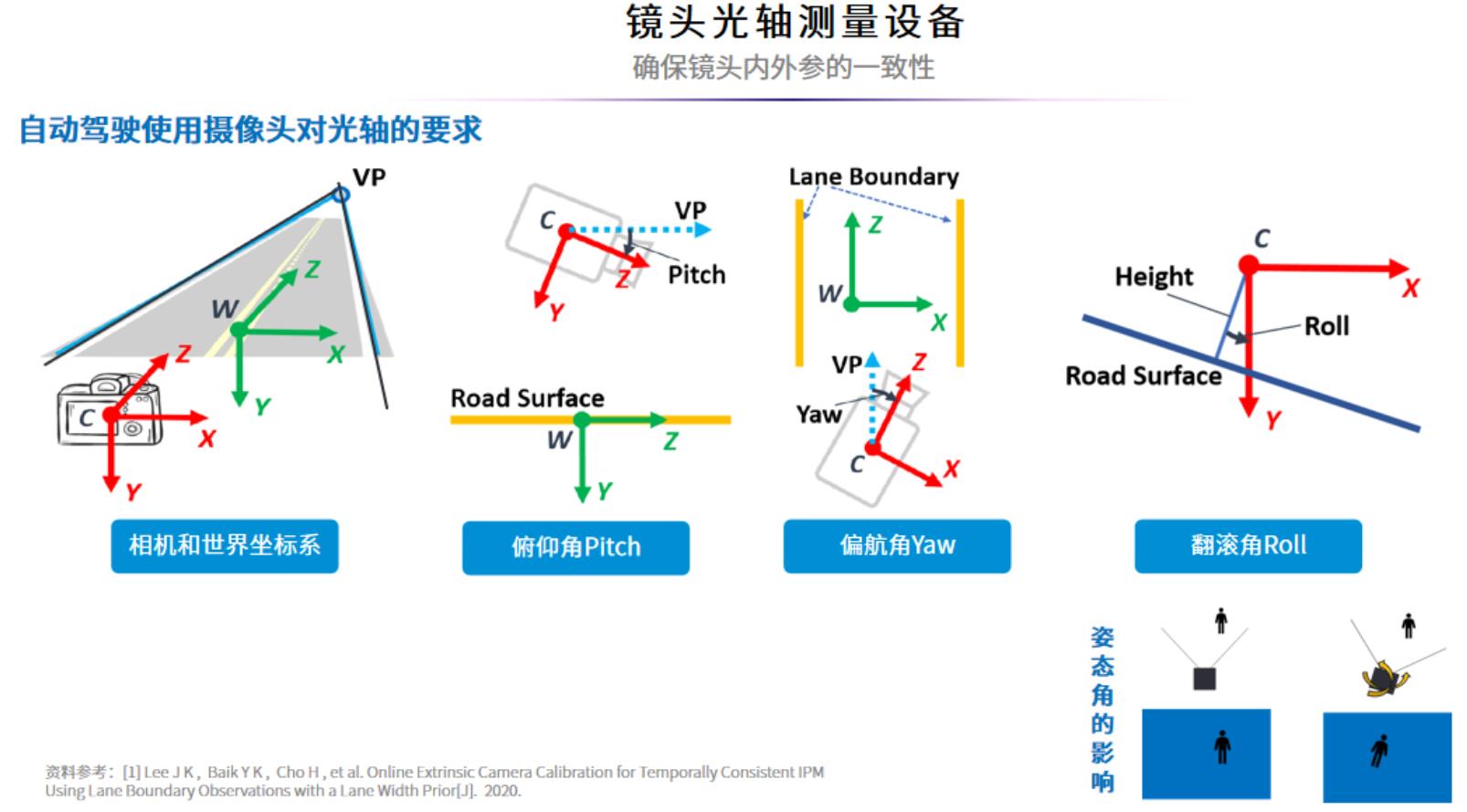
一般來說,鏡頭的外參只和攝像頭在車上的安裝位置有關(guān),但在攝像頭的AA過程中發(fā)現(xiàn),俯仰角和偏航角和鏡頭本身的狀態(tài)也有關(guān)。如果要得到一致性更好的鏡頭,就需要對(duì)鏡頭的俯仰角和偏航角進(jìn)行管控。
對(duì)一顆理想的鏡頭來說,使用AA工藝掃描其離焦曲線可以完美擬合成像面,在角度調(diào)整后可以得到重合的鏡頭光軸和姿態(tài)基準(zhǔn)軸,“但實(shí)際的鏡頭并不是理想的光學(xué)系統(tǒng),其姿態(tài)基準(zhǔn)軸和鏡頭標(biāo)定的內(nèi)參光軸是有一定偏差的。”
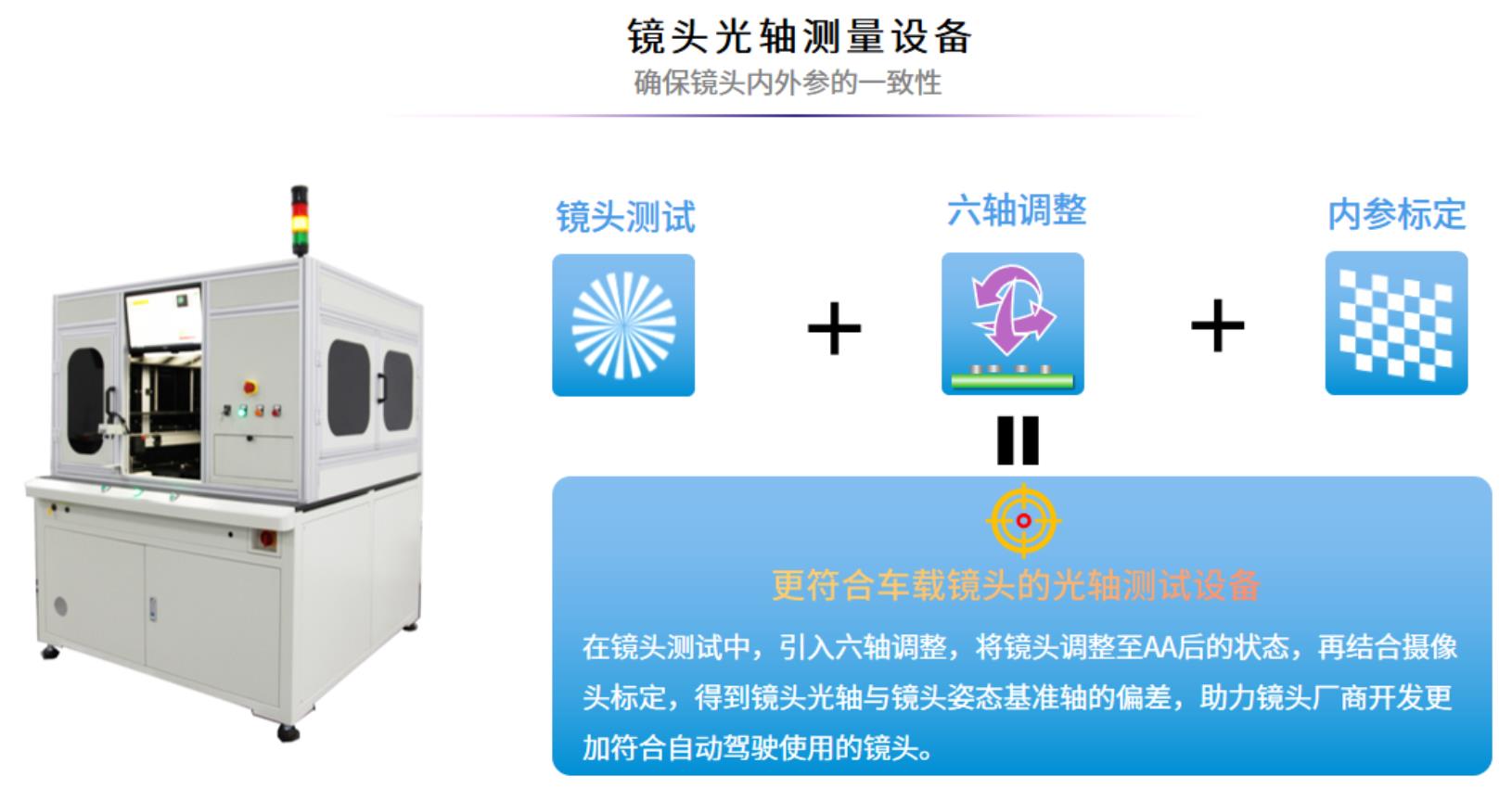
艾微視在國內(nèi)最早將內(nèi)參標(biāo)定引入了AA,很早就發(fā)現(xiàn)很難調(diào)整出一顆內(nèi)參中心和鏡頭姿態(tài)中心重合的鏡頭產(chǎn)品。針對(duì)這個(gè)問題的很多驗(yàn)證表明,只靠AA工藝達(dá)不到想要的狀態(tài),所以艾微視開發(fā)了鏡頭光軸測(cè)量設(shè)備。在鏡頭測(cè)試中使用六軸調(diào)整和內(nèi)參標(biāo)定,在鏡頭測(cè)試時(shí)調(diào)整鏡頭姿態(tài),再結(jié)合內(nèi)參標(biāo)定得到鏡頭光軸和基準(zhǔn)軸的偏差,幫助鏡頭廠商開發(fā)更適合自動(dòng)駕駛應(yīng)用的鏡頭。
艾微視有一款帶中繼鏡的標(biāo)定設(shè)備,其占地面積僅為3m2,相比現(xiàn)有設(shè)備,減少了測(cè)量范圍和讀圖數(shù)量,提高了生產(chǎn)效率。之前需要讀15-16張圖片,優(yōu)化后只需讀1張圖片,讀圖時(shí)間由30″縮至10″。該設(shè)備換型快,步驟少,操作簡(jiǎn)便,治具由幾穴降至1穴。
03智能制造助力8M車載攝像頭量產(chǎn)
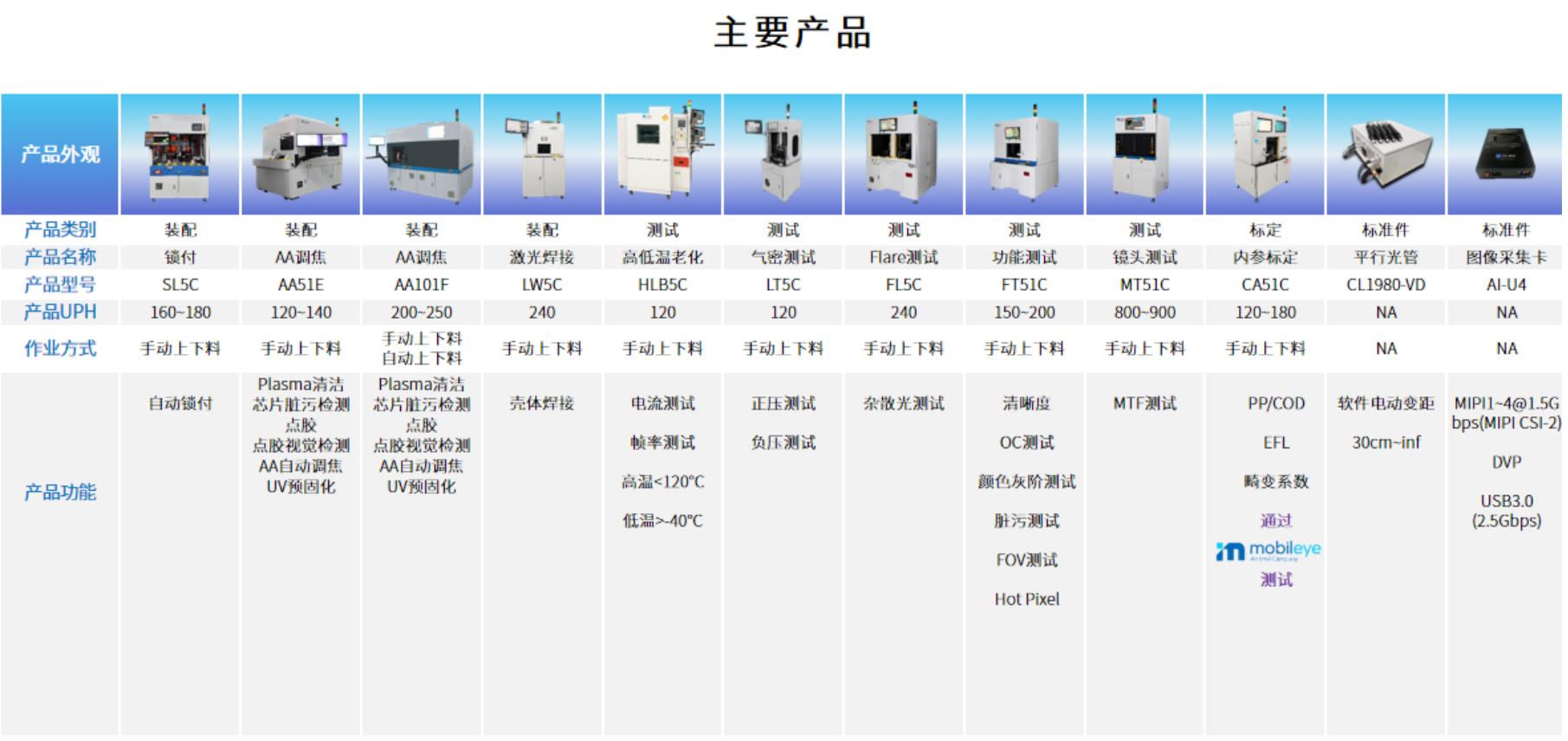
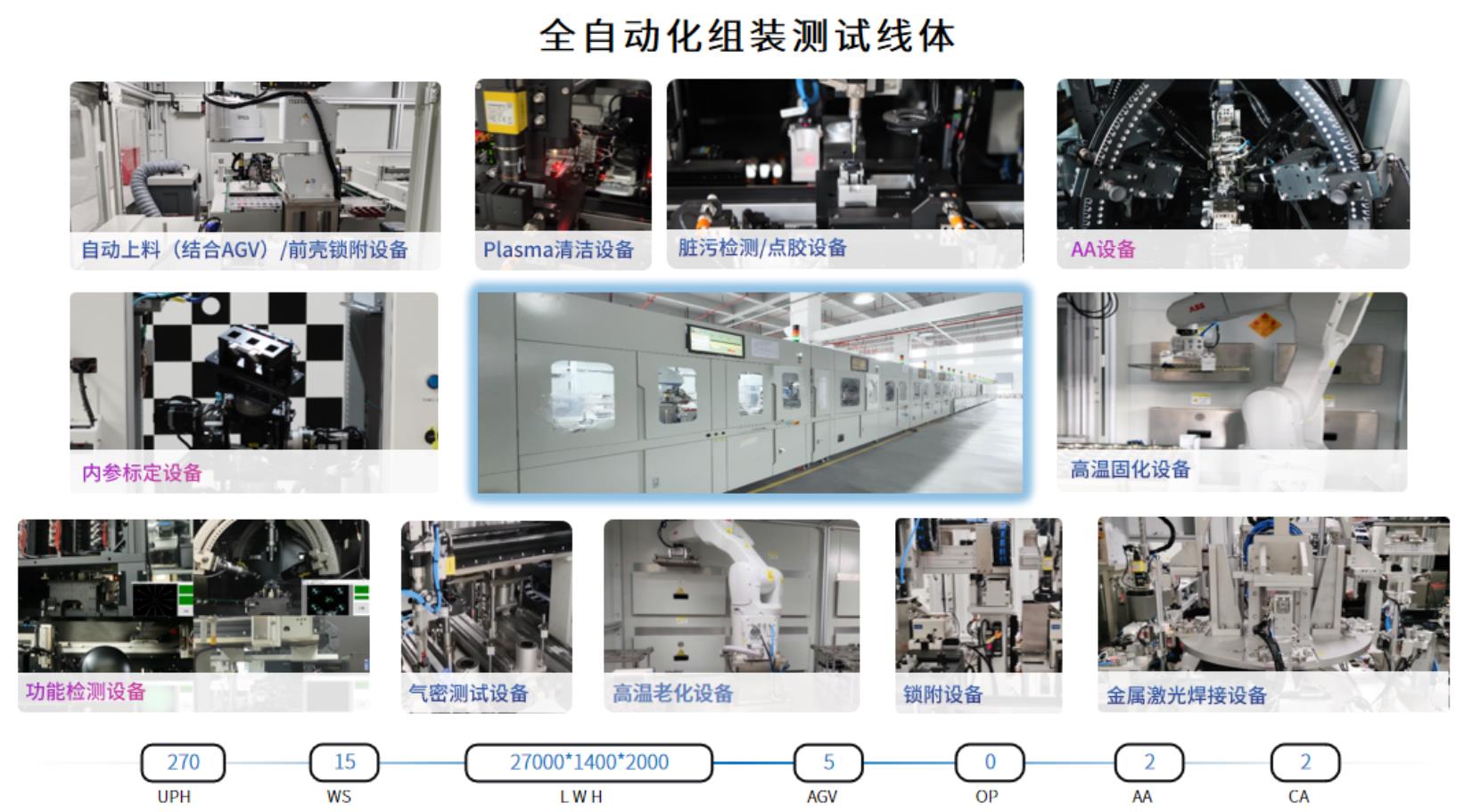
針對(duì)8M車載攝像頭生產(chǎn)測(cè)試,艾微視開發(fā)了一系列測(cè)試設(shè)備和部件,有助于完成模組的整個(gè)生產(chǎn)過程,其中有幾個(gè)比較特殊的設(shè)備。
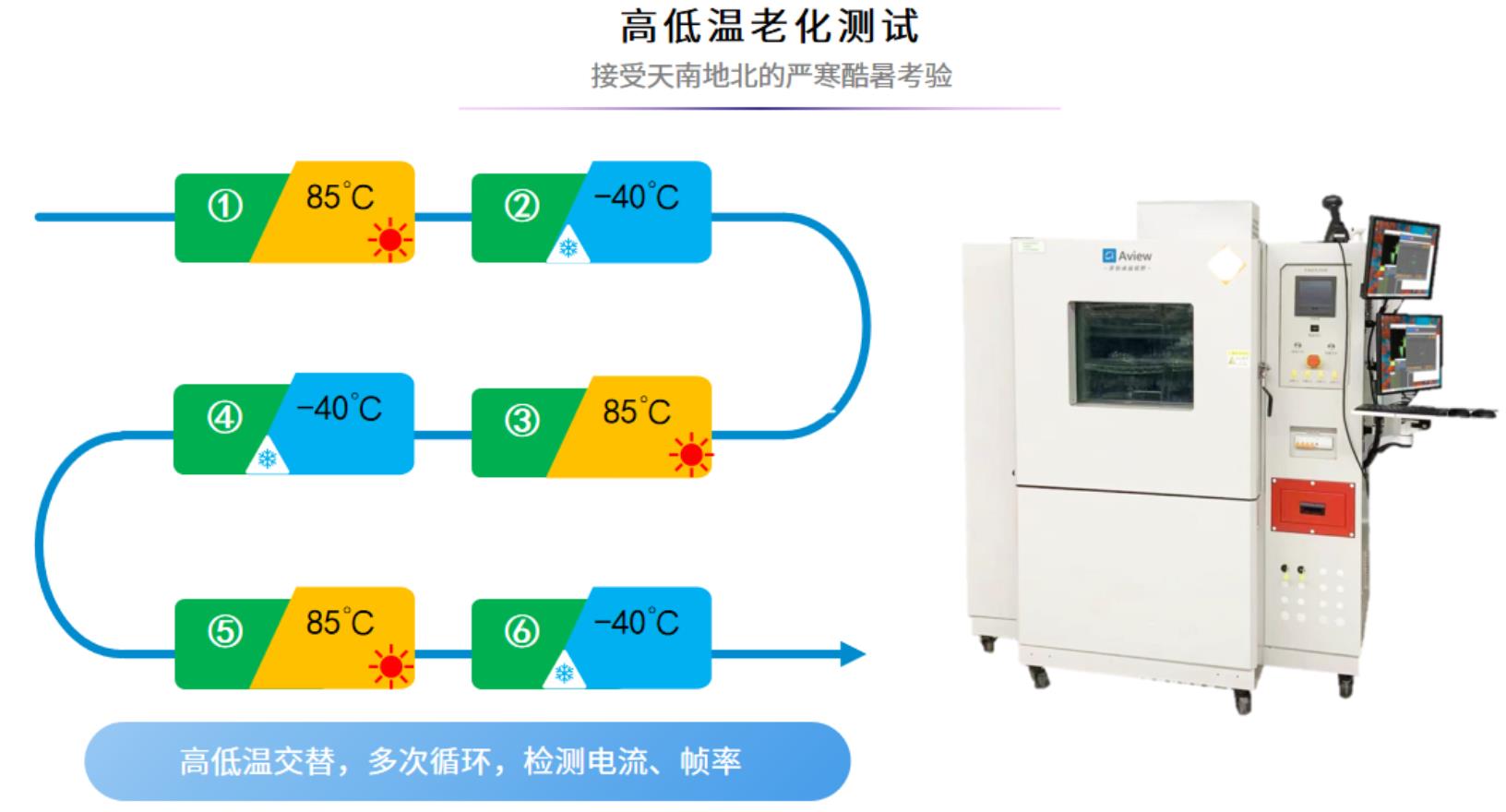
艾微視的高低溫老化設(shè)備可以在85℃和-40℃之間高低溫交替,多次循環(huán)檢測(cè)相機(jī)的工作電流和幀率。
為了更全面地保證攝像頭的成像品質(zhì),艾微視的高低溫成像測(cè)試設(shè)備在上一代高低溫離焦測(cè)試設(shè)備基礎(chǔ)上進(jìn)行了全面升級(jí),除了清晰度、離焦測(cè)試外,通過切換光學(xué)環(huán)境,還可拓展顏色、灰階、動(dòng)態(tài)范圍、畸變等測(cè)試項(xiàng)目,全面把控?cái)z像頭在高低溫下的成像變化。
艾微視還針對(duì)模組專門開發(fā)了雜散光測(cè)試設(shè)備,以解決鏡頭以外的擋風(fēng)玻璃或封裝引起雜散光的問題。通過對(duì)鏡頭測(cè)試設(shè)備和測(cè)試環(huán)境的升級(jí)改造,使測(cè)試更貼合車載鏡頭的實(shí)際使用場(chǎng)景。
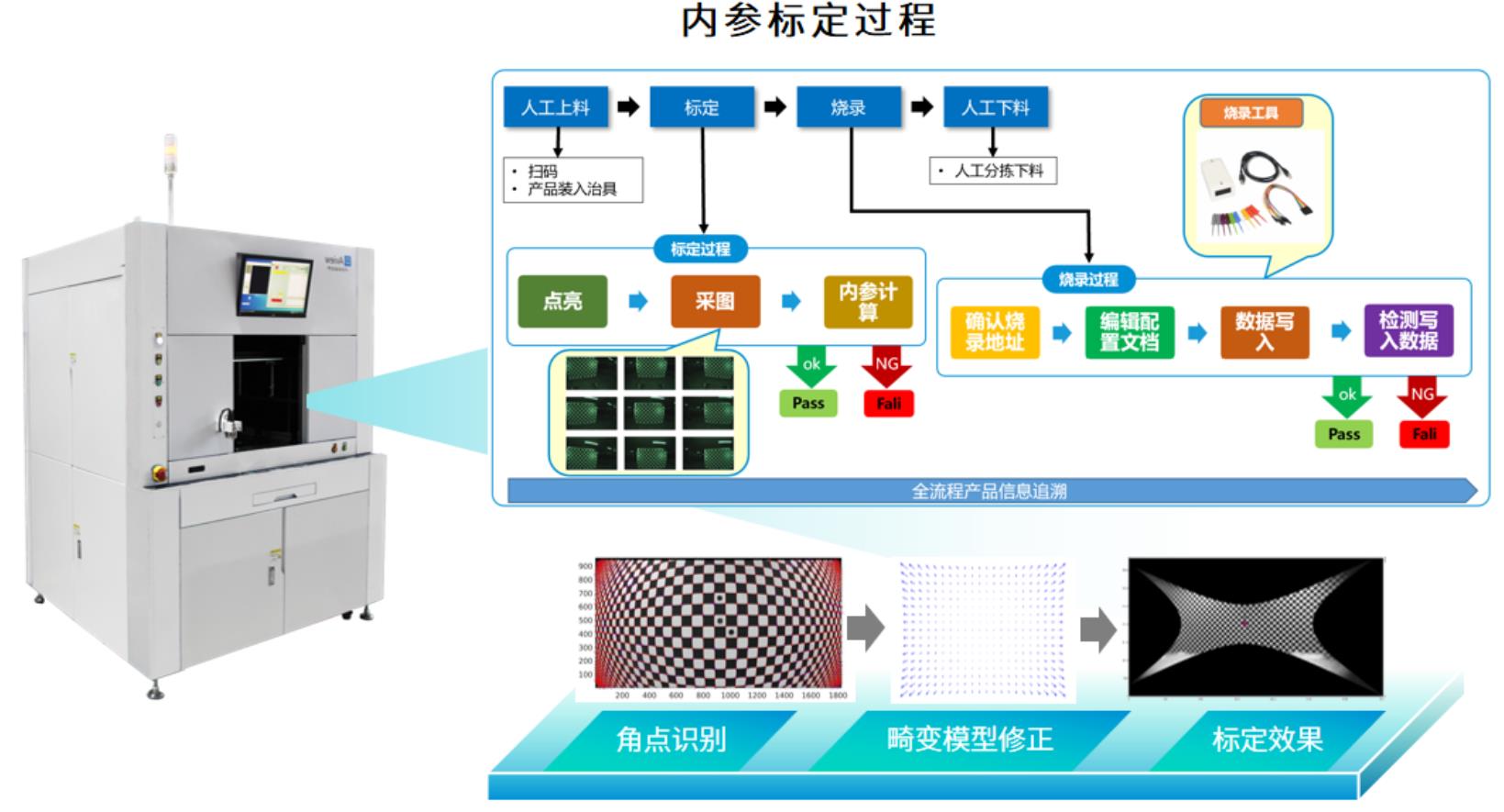
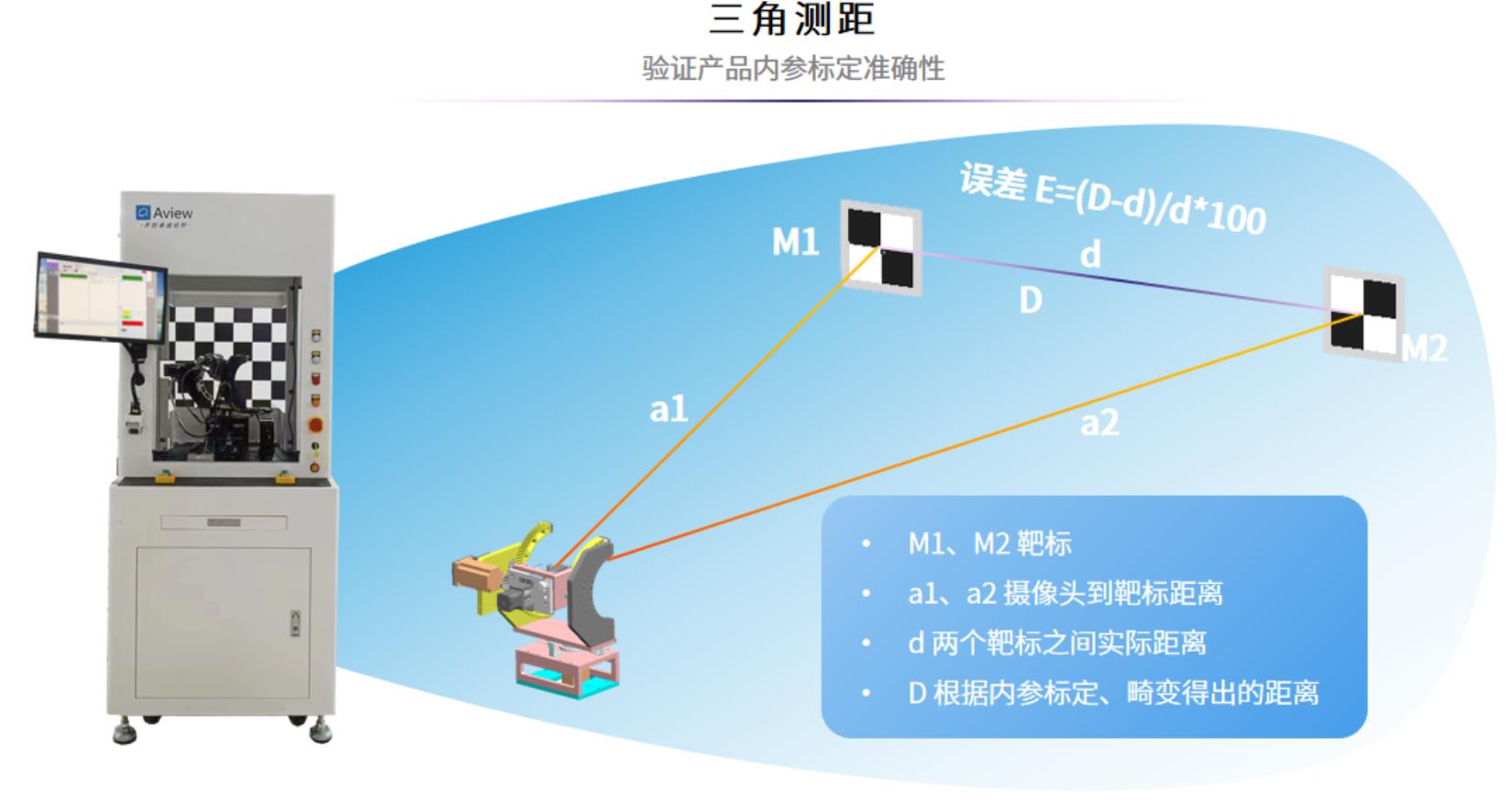
關(guān)于自動(dòng)駕駛應(yīng)用,自動(dòng)泊車和自動(dòng)駕駛攝像頭都需要進(jìn)行標(biāo)定,目前標(biāo)定流程基本上都是使用相機(jī)拍攝具有一定特征點(diǎn)的靶標(biāo)。艾微視使用7個(gè)盤用攝像頭拍攝一系列圖片,然后進(jìn)行內(nèi)參計(jì)算,將得到的內(nèi)參存在相機(jī)內(nèi)存中,方便后續(xù)使用時(shí)調(diào)用。為了知道內(nèi)參是否準(zhǔn)確,產(chǎn)線上還要用三角測(cè)距設(shè)備來驗(yàn)證內(nèi)參的準(zhǔn)確性,方法是用相機(jī)拍攝兩個(gè)有一定距離的靶標(biāo),根據(jù)內(nèi)參標(biāo)定的數(shù)據(jù)計(jì)算這個(gè)靶標(biāo)距離和實(shí)際距離的誤差。
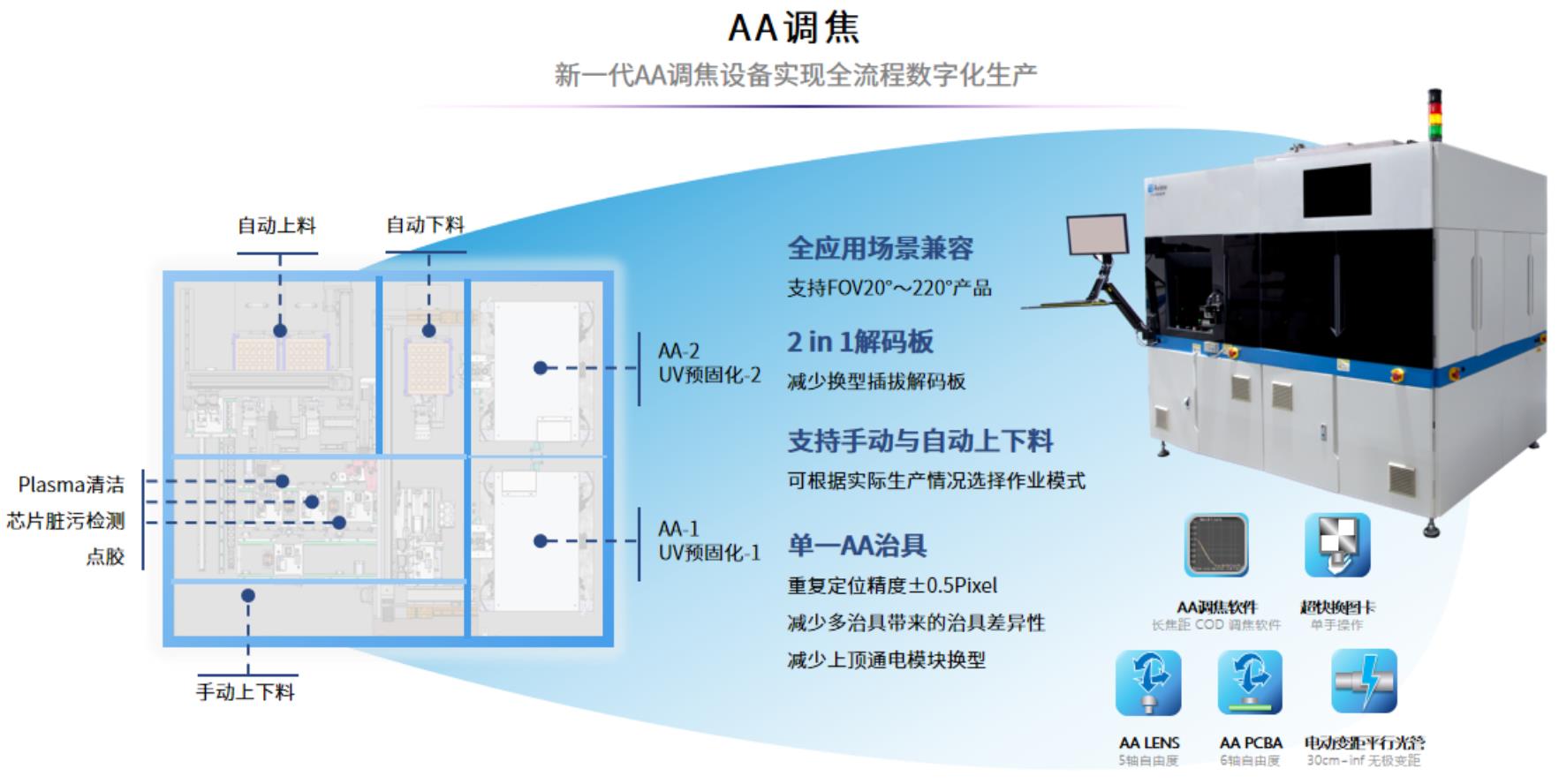
據(jù)介紹,從2014年第一代AA設(shè)備研發(fā)成功之后,艾微視一直在對(duì)AA設(shè)備進(jìn)行升級(jí)迭代,目前已推出第六代AA設(shè)備。新設(shè)備在前幾代的基礎(chǔ)上進(jìn)行了光學(xué)、電子、軟件、機(jī)械方面的全面升級(jí),兼容性、功能性和穩(wěn)定性都是有了很大提升。特別是,第六代AA設(shè)備支持上下料手自一體,可以快速升級(jí)成全自動(dòng)智能化產(chǎn)線,滿足客戶實(shí)現(xiàn)黑燈工廠的需求。
04為自動(dòng)駕駛探索與突破賦能
艾微視成立于2007年,一直在深耕光學(xué)圖像傳感器領(lǐng)域,目前在國內(nèi)車載攝像頭組裝測(cè)試領(lǐng)域處于領(lǐng)跑地位。除了車載攝像頭外,艾微視在激光雷達(dá)和毫米波雷達(dá)方面也有成功交付的設(shè)備,在安防、醫(yī)療、3C領(lǐng)域也有成功的客戶解決方案。
艾微視的新工廠已經(jīng)建成,將面積從2000m2提升到1萬m2,2條線組裝線升級(jí)至18條組裝線;20m2實(shí)驗(yàn)室升級(jí)為120m2,打樣室從25m2升級(jí)為100m2。
目前,艾微視在鏡頭和攝像頭方面都有相應(yīng)的組裝測(cè)試解決方案,有助于提高自動(dòng)駕駛感知硬件的品質(zhì),助力自動(dòng)駕駛的創(chuàng)新和發(fā)展。未來,艾微視將繼續(xù)與各領(lǐng)域的客戶精誠合作,提供感知硬件的高精密組裝與測(cè)試設(shè)備服務(wù),共同實(shí)現(xiàn)雙贏。

*版權(quán)聲明:本文為企業(yè)供稿,供稿企業(yè)對(duì)文章觀點(diǎn)及內(nèi)容合規(guī)性負(fù)責(zé)。如有疑義或轉(zhuǎn)載需求,請(qǐng)聯(lián)系供稿企業(yè)。






