
導(dǎo)讀:2021年12月17日,由佐思汽研主辦的2021佐思智能汽車年會暨金智獎頒獎典禮在蘇州召開。四維圖新高精度地圖憑借優(yōu)異的產(chǎn)品表現(xiàn),贏得了2021年度金智獎“技術(shù)領(lǐng)先獎”。 會上,四維圖新地圖產(chǎn)品設(shè)計部副總經(jīng)理孫靜女士做了《高精度地圖助力自動駕駛場景落地》的主題演講,賦能智慧出行,助力美好生活。
金智獎由佐思汽車研究院發(fā)起評選,旨在鼓勵中國汽車產(chǎn)業(yè)由大做強,促進(jìn)中國汽車產(chǎn)業(yè)轉(zhuǎn)型升級、打造更具競爭力的整零協(xié)同創(chuàng)新關(guān)系,助力實現(xiàn)汽車強國并做出積極貢獻(xiàn)的頭部企業(yè)。
四維圖新高精度地圖
四維圖新提供面向多等級自動駕駛的高精度地圖“數(shù)據(jù)+引擎”產(chǎn)品服務(wù),高精度地圖全球率先通過ASPICE CL3評估;融合導(dǎo)航地圖、ADAS地圖、停車場地圖、高精度地圖,提供一站式OneMap地圖服務(wù),支持寶馬、戴姆勒、沃爾沃、嬴徹科技等主機廠量產(chǎn)打造自動駕駛應(yīng)用解決方案。 會上,四維圖新地圖產(chǎn)品設(shè)計部副總經(jīng)理孫靜女士做了《高精度地圖助力自動駕駛場景落地》的主題演講。

以下為演講稿部分內(nèi)容。 四維圖新成立于2002年,致力于以自動駕駛系統(tǒng)解決方案、云服務(wù)平臺、高精度地圖、高精度定位以及汽車電子芯片等核心業(yè)務(wù),打造“智能汽車大腦”,賦能智慧出行,助力美好生活,致力于成為客戶信賴的智能出行科技公司。
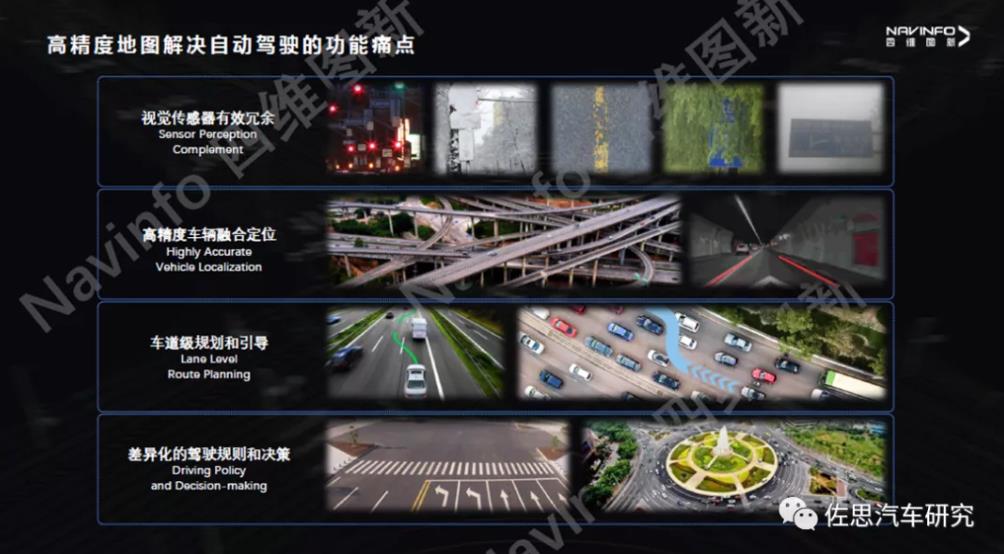
一、高精度地圖解決自動駕駛的功能痛點
高精度地圖需要做什么?解決哪些問題和痛點?
第一點,首先解決物理傳感器感知的失效問題,為感知提供更好的增強及有效的冗余,比如,信號交通燈的精準(zhǔn)控制、感知信息在現(xiàn)場或既定環(huán)境下的遮擋或不清晰。
第二點,解決各種復(fù)雜場景定位傳感器的遮擋問題,高精地圖的品質(zhì)指標(biāo)是處于較高水平,能夠有效的彌補車輛定位傳感器的失效場景,降低定位失效率。
第三點,高精度地圖是超視距傳感器,用來彌補視覺傳感器的不足,它能夠提供車道級的路徑規(guī)劃、速度的控制、姿態(tài)的控制等;比如,做超車控制時,可以為超車后的場景提供預(yù)測控制參考,也可以為車道變換前提供車速控制依據(jù)。同理的情況還包括前車遮擋、高曲率路段、天氣環(huán)節(jié)等視覺傳感器的各種失效場景。
第四點,高精度地圖還可以提供現(xiàn)場差異化的駕駛規(guī)則,以及在一些復(fù)雜場景下輔助決策。
總體來說,當(dāng)車輛對環(huán)境的感知越清楚,自動駕駛系統(tǒng)的安全性就越高,效率也就越高。地圖本質(zhì)上就是補充感知能力,提供預(yù)測感知信息及視覺感知不到的規(guī)則信息。
二、超視距傳感器,自動駕駛風(fēng)險控制
高精度地圖除了可以解決上文提到的實用性問題外,還可以解決風(fēng)險性問題。比如高速公路,在大多數(shù)人的認(rèn)知里高速公路是封閉的場景,不會有車流交匯,但在實際大規(guī)模量產(chǎn)的時候,發(fā)現(xiàn)了大約1000+的特殊場景。比如高速上出現(xiàn)調(diào)頭口、平面交叉口、并行路段,特殊的標(biāo)線、非正常開口等等導(dǎo)致正常自動駕駛感知異常的情況,此時高精度地圖可以為車端提供這些場景的提前感知和警示。

三、四維圖新高精度地圖研發(fā)進(jìn)展
四維圖新的產(chǎn)品研發(fā),涉及不同的場景,包括面向廣域高速、城市高速和城市普通道路,也涉及多種在線服務(wù)。
四、支持自動駕駛?cè)珗鼍暗母呔鹊貓D產(chǎn)品組合
在地圖數(shù)據(jù)方面,四維圖新可以提供自動駕駛?cè)珗鼍案呔鹊貓D的產(chǎn)品組合,在統(tǒng)一的路網(wǎng)框架之下,基于ADAS Map、HD Lite Map、HD Pro、AVP等多種地圖產(chǎn)品,實現(xiàn)點對點的L2、L2+、L3到L4的完整的自動駕駛數(shù)據(jù)服務(wù)。

五、L3級別高速自動駕駛地圖
自動駕駛地圖本質(zhì)上是將現(xiàn)實世界抽象成可以被自動駕駛汽車?yán)斫獾臄?shù)據(jù)集合。目前已經(jīng)開發(fā)完成的基于高速HD Pro的產(chǎn)品有100多種地圖要素,包含基礎(chǔ)信息、精細(xì)化圖層以及安全方面的圖層。通過不同的維度制作,涉及基礎(chǔ)特征、深度表達(dá)、精細(xì)化、功能安全等多種維度,覆蓋全國高速公路,適用于L3級別自動駕駛場景。
如下圖所示,高精度地圖的要素多,精度高,數(shù)據(jù)量大,因此自動化生產(chǎn)扮演了非常重要的角色。

采集完成之后的原始點云數(shù)據(jù):
第一步,進(jìn)行降噪處理,去除冗余的點云;
第二步,進(jìn)行點云數(shù)據(jù)分類,用不同的顏色標(biāo)注提取的對象或幾何;
第三步,數(shù)據(jù)自動提取,可以從點云中提取到車道信息、路牌、信號燈等,HD地圖包含100多種屬性要素,大部分都是自動化提取的。
第四步,自動化提取完成后,進(jìn)行自動化檢查和人工驗證,確保準(zhǔn)確度。
其中,特殊車道邊線、車道寬度變化、導(dǎo)流區(qū)、圓形標(biāo)牌、橋墩、上方障礙物面等,普通導(dǎo)航地圖中是沒有的,只有高精度地圖才制作這些信息。
最后呈現(xiàn)的結(jié)果不帶點云,有道路幾何并賦予了語義信息的高精度地圖。
接下來給大家介紹使用UGC數(shù)據(jù)的Map Learning地圖更新體系。
1、在信度下降到一定程度的地區(qū)將觸發(fā)地圖更新,把更新地圖的任務(wù)分配至合作伙伴車輛。
2、當(dāng)車輛經(jīng)過此段區(qū)域時,車輛傳感器會自動實時感知數(shù)據(jù),自動上傳數(shù)據(jù)。
3、上傳數(shù)據(jù)后,系統(tǒng)對數(shù)據(jù)進(jìn)行獲取、分類和識別。
4、根據(jù)車輛回傳的數(shù)據(jù)結(jié)果判斷使用哪種采集方式更新。如果是數(shù)據(jù)的刪除類,就直接用眾包數(shù)據(jù)結(jié)果刪除即可。
5、通過地圖學(xué)習(xí)檢測到的新道路和大面積屬性變化,由采集車輛進(jìn)行現(xiàn)場更新。
6、通過HDMS平臺實時發(fā)布更新的地圖數(shù)據(jù)。
六、中國普通道路比高速自動駕駛價值更高
目前,對高速公路的開發(fā)日漸成熟之后,也開啟了普通道路的高精度地圖開發(fā),相比高速公路,普通道路的駕駛成本高,更容易推廣和價值體現(xiàn)。

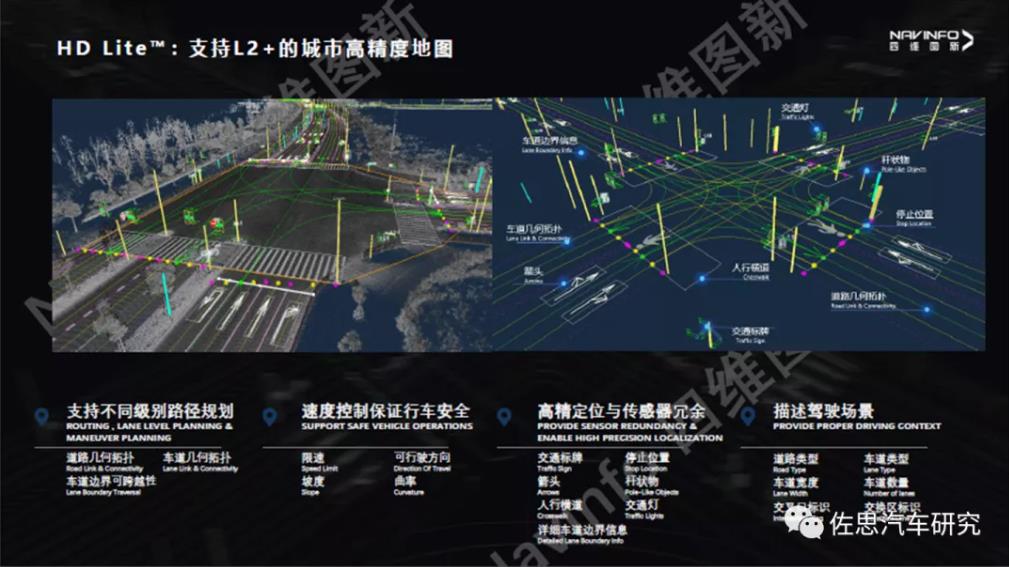
七、HD Lite? : 支持L2+的城市高精度地圖
關(guān)于HD Lite,是面向于支持L2+自動駕駛地圖服務(wù)的HD Lite產(chǎn)品,也是這兩年四維圖新的主要開發(fā)產(chǎn)品之一,今年將計劃覆蓋14萬km,并將在未來2年快速擴展。
HD Lite可涵蓋所有基礎(chǔ)要素,支持車道級路徑規(guī)劃、速度控制、高精度定位、可以還原豐富的駕駛場景。HD Lite是也是連接L3與L4場景的樞紐。
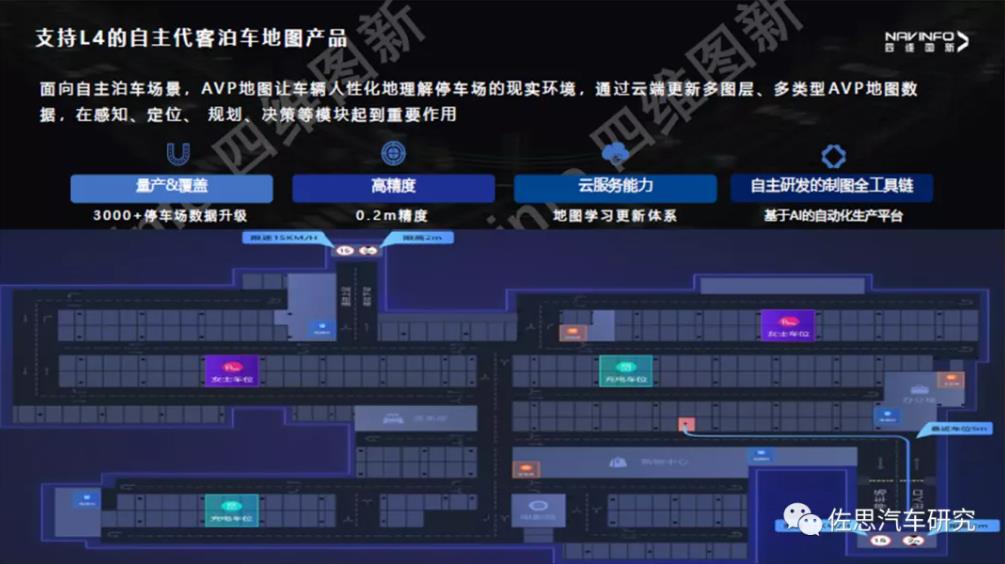
八、支持L4的自主代客泊車地圖產(chǎn)品
針對解決車主停車難、找車難的痛點,而開發(fā)了AVP地圖,可以實現(xiàn)一鍵泊車,一鍵召車的功能;此外 ,AVP產(chǎn)品不僅提供高精度地圖,同時支持基于點云以及基于視覺的定位特征圖層,能夠支持車端、廠端或者提供車、廠結(jié)合的不同解決方案。
九、四維圖新自動駕駛地圖整體解決方案
基于高精度地圖對自動駕駛產(chǎn)業(yè)服務(wù)化,四維圖新已經(jīng)具備了從數(shù)據(jù)到云端,再到車端的整體解決方案。
在云端,搭建了數(shù)據(jù)發(fā)布平臺,提供基于Map Learning更新體系及相應(yīng)的仿真服務(wù)。
在車端,開發(fā)了感知模塊、融合定位模塊、交叉參考模塊,基于動態(tài)大數(shù)據(jù)的路徑規(guī)劃,打通了地圖數(shù)據(jù)的更新鏈路及OTA的升級鏈路。

十、車端SDK功能引擎
車端SDK功能引擎,可以支持無縫地圖更新以及融合定位的功能。

十一、智能導(dǎo)航產(chǎn)品
四維圖新第三代導(dǎo)航產(chǎn)品,這款產(chǎn)品結(jié)合高精度地圖實現(xiàn)了IVI域和AD域的無縫銜接和互通。在導(dǎo)航場景下,基于高精度地圖,它可以還原豐富駕駛場景,使駕駛者的沉浸感更強。
同時,基于多傳感器,可以實時感知周邊車輛的危險信息,實現(xiàn)導(dǎo)航過程中對風(fēng)險的提醒和避讓,使駕駛過程更安全。

作為國內(nèi)率先布局高精度地圖產(chǎn)品研發(fā)的公司,四維圖新一直在高精度地圖與自動駕駛應(yīng)用的道路上探索、實踐,推動汽車智能化解決方案的落地。
來源:佐思汽車研究






