
導讀:在科技高速發展的今天,汽車智能化已是必然的趨勢,自動駕駛汽車的研究也在世界范圍內進行得如火如荼。而在ADAS測試與開發中,激光雷達以其優越的性能和較高的精度而占據著非常重要的地位,它是ADAS測試與開發中必不可少的組成。
一、激光雷達介紹
1、激光雷達原理
1.1、全稱
激光雷達(英文Lidar),英文全稱為Laser Detecting and Ranging,即激光探測和測距。
1.2、 探測原理
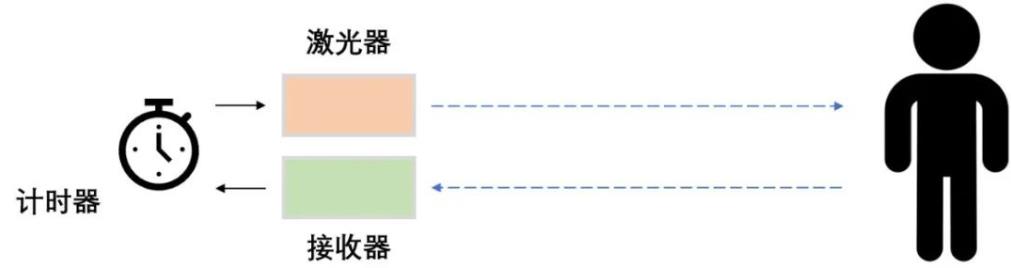
激光發射器發射激光脈沖,計時器記錄發射時間;脈沖經物體反射后由接收器接受,計時器記錄接受時間,距離d= (Δt*c) /2。
之后再通過水平旋轉掃描來測角度,并根據角度和距離這兩個參數來建立二維的極坐標系。然后通過獲取不同的俯仰角度信號來獲得三維中的高度信息。由此可探測到周圍環境的空間三維位置,并且可根據探測到的信息來進行三維建模。
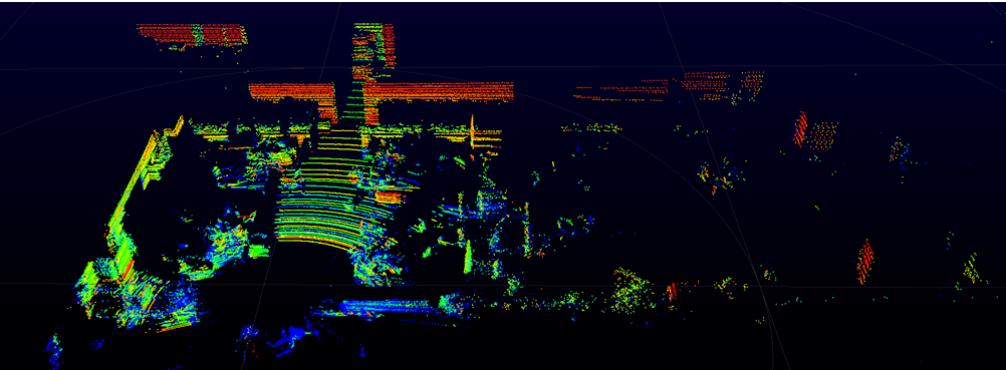
高頻激光可以在一秒內獲取大量(約150萬個)的位置點信息(稱為點云)。除了可以獲取位置信息外,激光信號的反射率還可以區分目標物質的不同材質。
2、主流激光雷達品牌
2.1、Velodyne
特點:精度高;范圍廣,可360°探測;抗干擾能力強。其性能卓越,但價格昂貴。
以在全球位居前列的激光雷達制造廠商Velodyne為例:

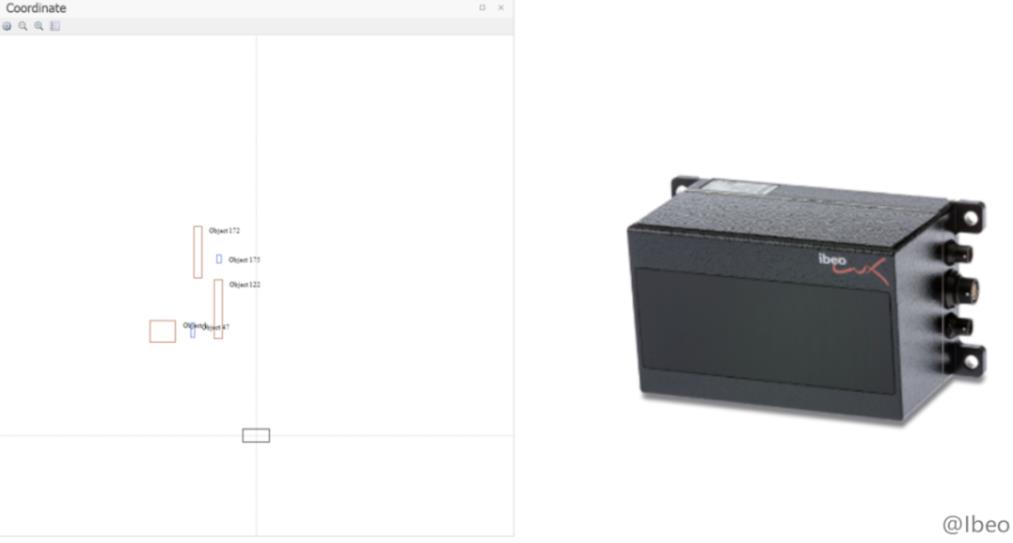
2.2、Ibeo
特點:可識別障礙物類型,如行人、汽車或大卡車等。可輸出障礙物俯視圖輪廓、目標物體位置和運動信息參數。

3、激光雷達數據
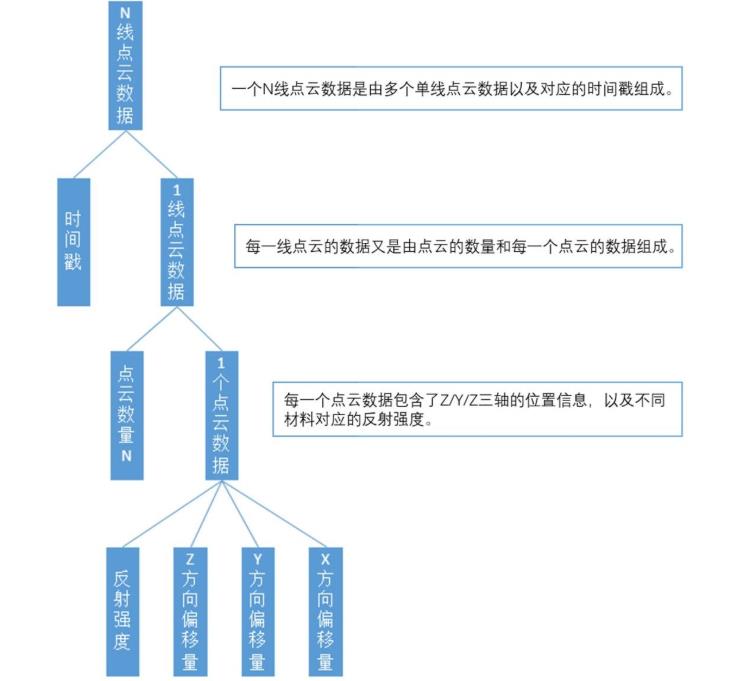
在實際的無人駕駛系統中,每一幀的數據都會有時間戳,需根據時間戳進行后續和時間有關的計算。因此,N線激光雷達的點云數據結構如下圖所示。
二、激光雷達在ADAS測試中的應用與作用
激光雷達在無人駕駛運用中擁有幾個核心作用——周圍環境3D建模、高精度定位以及障礙物檢測與分類識別。
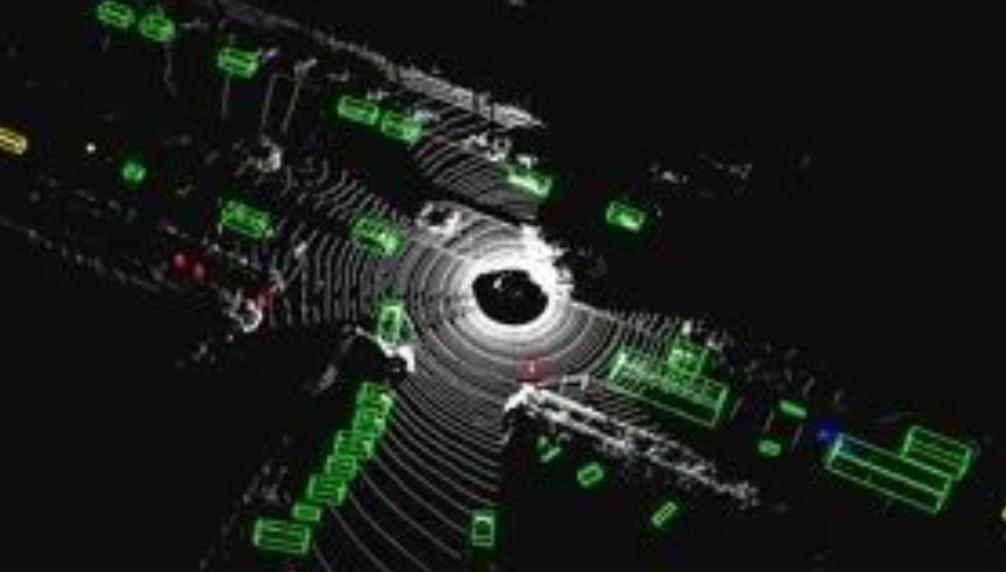
1、障礙物的檢測和分類
激光雷達在掃描的過程中,首先識別障礙物,明確障礙物在空間中的位置,再根據存在的障礙物來進行分類。例如,我們將像車、人這些障礙物分割成為獨立的個體,通過分割出來的獨立個體再去匹配,從而進行障礙物的分類和物體的跟蹤。而跟蹤的過程是先分割點云,再通過點云做關聯目標,如此一來,我們便能判斷出上一楨和下一楨是否屬于同一個物體,以便再進行目標跟蹤,然后輸出目標跟蹤信息。
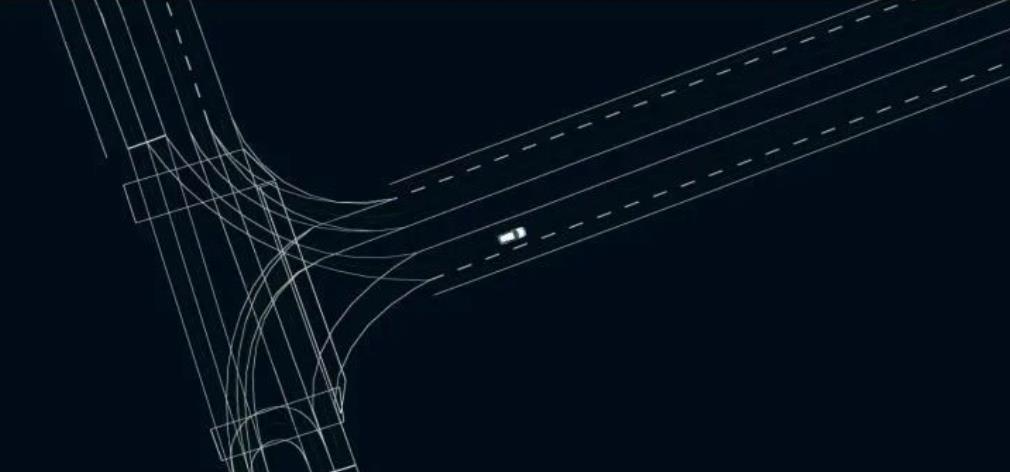
2、高精度電子地圖制圖與定位
利用多線激光雷達的點云信息與地圖采集車載組合慣導的信息來進行高精度地圖制作。自動駕駛汽車通過激光點云信息與高精度地圖兩者相匹配來實現高精度定位。
三、激光雷達數據采集、存儲與分析
1、激光雷達數據采集
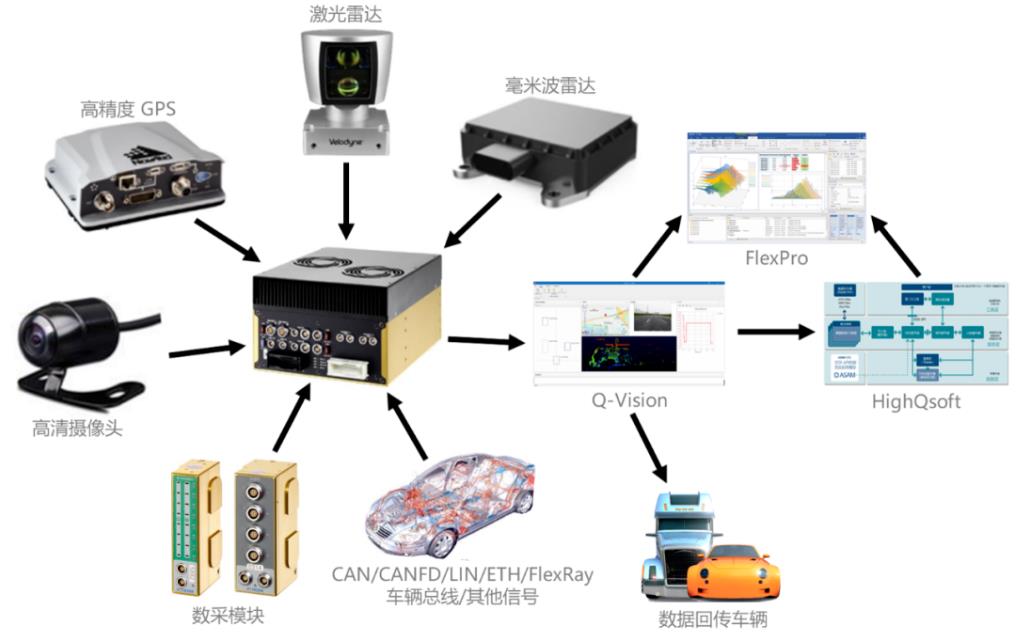
在ADAS測試中,一輛車上一般需裝載多個激光雷達、多個毫米波雷達和多個攝像頭組成,這些數據將通過以太網或CANFD等數據類型來進行輸出。而風丘科技的ADAS測試方案可同時對多路雷達、視頻、車輛總線和數采等多種數據進行采集、在線顯示與存儲。
1.1、硬件:高性價比工控機

? 配置:inter i7-8700T CPU、32GB RAM、Win10操作系統;
? 接口:3 Video、6USB
3*1GB ETH、2 RS-232
8 I/O、Audio、1CAN
可擴展的Pcle接口(CAN、LIN);
? 工作溫度:-40℃~70℃;
? 2個可熱插拔的移動硬盤卡槽;
? 單個硬盤可支持1TB存儲 ;
? 支持Wi-Fi、4G、LTE等無線通訊;
? 9~48 V車載供電。
1.2、軟件:Q-Vision
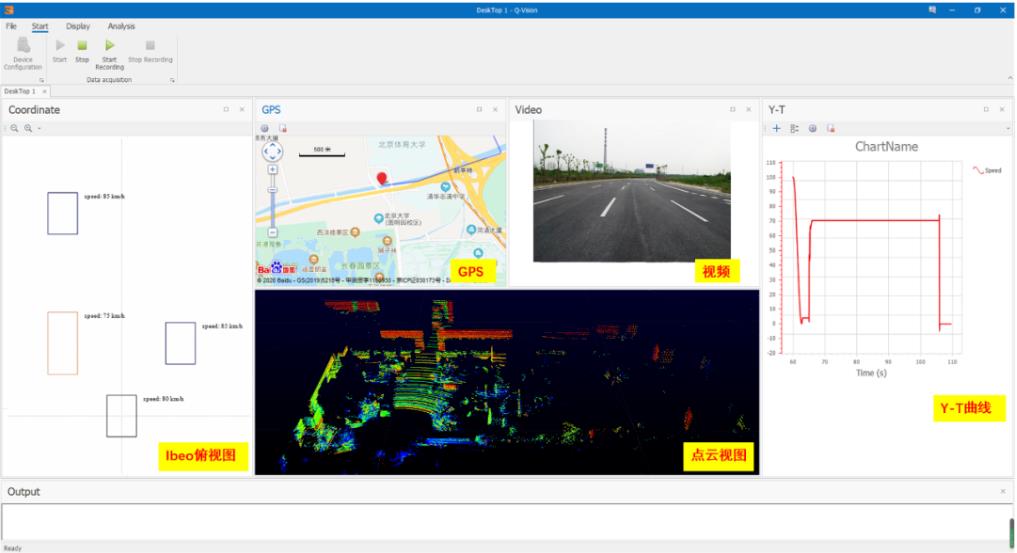
? 支持CAN/LIN/CANFD/ETH等多種信號采集;
? 支持雷達點云圖、雷達俯視圖、地圖軌跡、視頻、CAN總線和y-t等多種視圖顯示;
? 支持Kvaser、Vector、Softing和NI等多種CAN硬件;
? 支持Velodyne、Ibeo等主流雷達傳感器;
? 支持車輛測試、ECU標定和UDS診斷等多種用途;
? 支持XCP/CCP、UDS、J1939和OBDⅡ等多種協議;
? 支持特定功能開發。
1.3、 激光雷達數據存儲
激光雷達以及其他傳感器輸出的以太網等數據可由數據記錄儀記錄存儲在硬盤中,再通過高速讀取上傳設備將硬盤中的數據上傳到云數據管理中心,然后將數據標簽化管理,以便查找。
1.4、硬件:高速硬盤讀取器

? 可同時讀取8個硬盤;
? 單個硬盤可支持1TB;
? 單個讀取速度:1135MB/s;
? 100 V~240 V供電;
? 尺寸:W427×D230×H95。
1.5、 云數據中心:HighQsoft
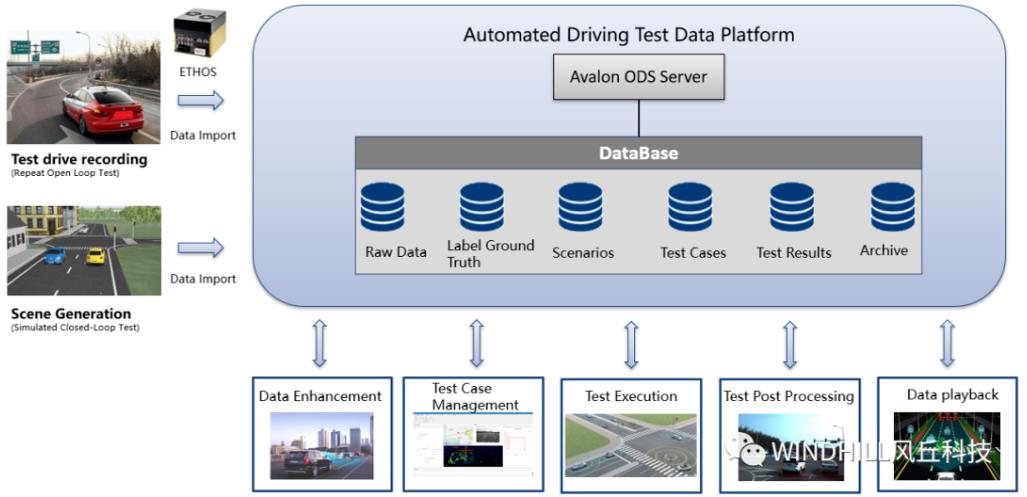
? 可根據測試項目、測試日期和測試場景等將數據標簽化管理以及預處理;
? 提供ODS數據接口,可直接訪問數據庫內容。
來源:WINDHILL風丘科技






